多功能智能养宠机器人设计
2022-01-04冯苗苗卢泽森冯俊豪
崔 敏, 冯苗苗, 杨 琨, 卢泽森, 冯俊豪
(五邑大学智能制造学部, 广东江门 529020)
0 引言
随着人们生活质量的提高, 更多的人选择饲养宠物来陪伴自己,缓解压力,获取生活的满足感。 但由于人们携带宠物出行不方便、上班时间无法照顾宠物等缘由,也带来了诸如宠物拆家、宠物自虐及随地大小便等居家“留守宠物”的若干问题。 目前市面上针对这些“留守宠物”,仅有喂食机、逗狗机等几款单一功能产品,无法满足“铲屎官”们日益增长的需求[1]。 为了解决饲养宠物带来的这一系列问题,减少“铲屎官”的烦恼,研制宠物用多功能智能机器人迫在眉睫。
为此,本文设计了一款多功能智能养宠机器人,在现有扫地机器人和陪玩机器人功能的基础上, 结合CAD/CAM、语音和视觉联动、SLAM 等技术[2],开展组合创新设计,实现了机器人自主导航、逗狗抛球、自主避障[3]、清理宠物排泄物等功能。
1 机器人总体设计
多功能智能养宠机器人具有以下基本功能: ①语音智能交互功能:通过语音实现机器人指定控制功能,与用户实现智能交互;②自主拾球和抛球功能:利用机械爪自主捡取玩具球,并通过发射装置发射出去,整个流程依靠机器人自主完成;③清理垃圾功能:能对灰尘和宠物排泄物进行识别以及判断, 并会在机器人内部进行装袋及封装处理;④自主定位与导航:机器人在室内移动过程中根据激光扫描和对自身位置的估计,建造增量式室内地图,实现机器人的自主定位和导航;⑤避障功能:通过与主控板相连接的红外传感器发送数据,指引驱动器进行避障;⑥自主警报功能: 依靠烟雾传感器及温度传感器实时检测室内安全,有紧急情况会及时向用户发出警告。 机器人基本功能如图1 所示。
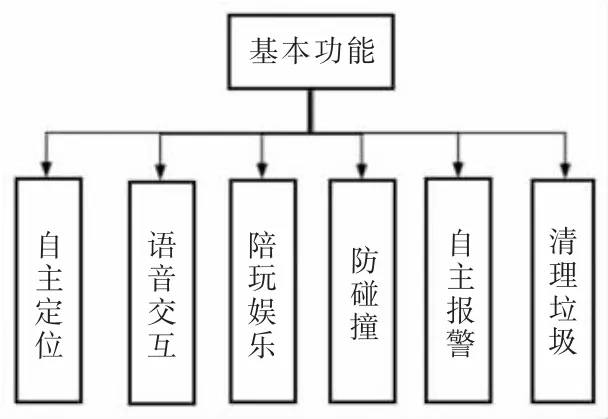
图1 机器人功能示意图Fig.1 Schematic diagram of robot function
机器人包括机械本体和控制系统两大模块。 机械本体主要是由行走机构、盘上机构和盘下机构三部分组成,应用全向轮组件作为行走机构,底盘上布置有机械手、发射装置和视觉云台,底盘下设计清洁毛刷和清理装置。 机械本体结构如图2 所示。

图2 机械本体结构渲染图Fig.2 Mechanical body structure rendering
机器人控制系统包括Arduion 开发板、语音智能交互模块、Openmv 视觉模块和自主导航模块等。
2 工作原理
智能养宠机器人的操作可采用语音或自动模式。 当语音板接收到下达指令,即将指令发送给树莓派开发板,由其对指令进行识别判断, 并转化为不同的信号传输到Arduino 开发板;由Arduino 对收到的信号进行分析,再将信号传输到Openmv 视觉模块;视觉模块接收到信号后,判断信号是陪玩还是清扫, 启动摄像头对目标状态进行图像识别, 将目标的坐标位置及大小等信息经过数据处理分析后发送回Arduino, 由Arduino 开发板驱动电机或舵机,实时调整机器人的行走位置,并控制摄像头及机械爪的运动。 控制系统的总体架构如图3 所示。 若为陪玩,通过机械爪拾取小球,将拾到的小球放至发射器滑道上,通过弹射机构将小球发射出去;若为清理较大垃圾,则通过两个相向旋转的毛刷对垃圾进行清理封装; 若为清扫灰尘,则利用吸附檫拭方法对地面进行清扫。
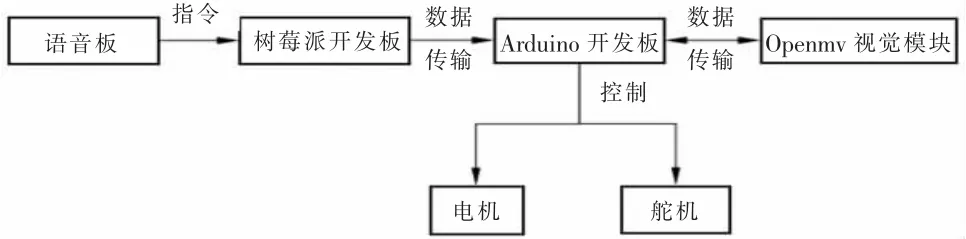
图3 机器人控制架构图Fig.3 Robot control architecture diagram
若主人不在家, 则可开启自动模式, 采用SLAM 技术,通过激光雷达构建室内地图,使机器人按照巡航路线执行相应的操作,实现实时避障和自主导航。
3 机械本体主要部件结构设计
智能养宠机器人机械本体主要结构分为倾斜式丝杆三轴机械手、发射装置、视觉云台、锥齿轮联动毛刷、清理装置等五个组件。
(1)倾斜式丝杆三轴机械手由机械爪、舵机、电机、丝杆、导柱、滑块、联轴器、支架等组成,如图4 所示。 其中机械爪、舵机1、舵机2 和机械爪支架构成旋转云台,由舵机1 控制机械爪的开合,舵机2 控制机械爪的仰俯转动。 旋转云台与滑块相连接, 滑块在电机的带动下可沿丝杆轴向移动,从而实现机械爪的三自由度运动。考虑到机械爪拾取小球后需稳定且快速地将小球放入滑轨上端, 故将丝杆支架设计成倾斜式,固定在底盘上。
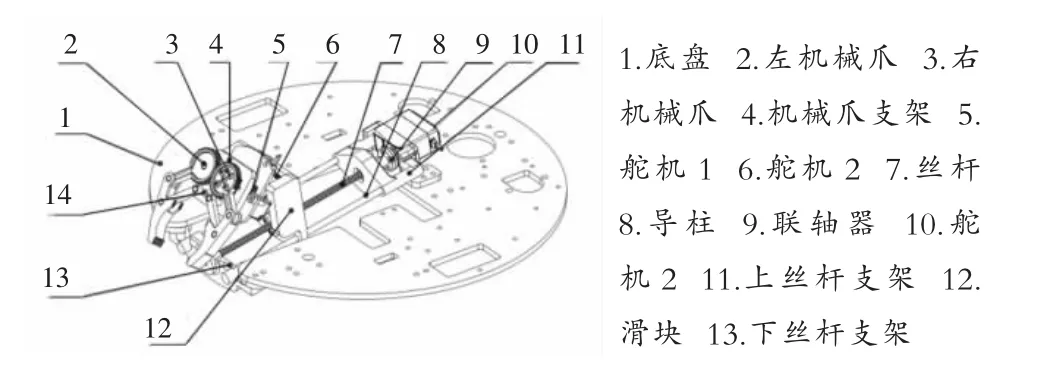
图4 倾斜式丝杆三轴机械手Fig.4 Inclined screw three axis manipulator
(2)发射装置由电机、摩擦轮、滑轨和支架等组成,如图5 所示。摩擦轮为两个并列的橡胶轮,分别由两个反向的直流减速电机带动其转动。机械爪由视觉指引,拾取小球放入滑轨,小球沿着滑轨滚下,在滑轨下方与摩擦轮相接触,由此产生的摩擦力将小球弹射出去。

图5 发射装置Fig.5 Launcher
(3)视觉云台由摄像头、电机和支架组成。 采用两个海泰无刷电机, 分别控制摄像头的竖直角和水平角两自由度运动,使之拥有更为灵活的视野,如图6 所示。
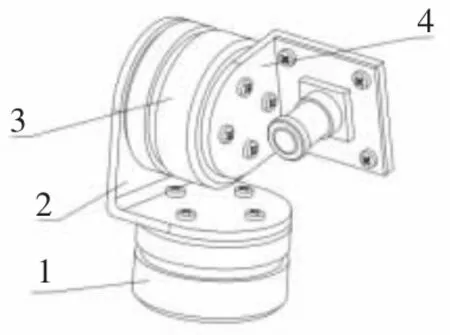
图6 视觉云台Fig.6 Visual table
(4)锥齿轮联动毛刷机构由支架固定在底盘之下,通过采用独特的锥齿轮传动方式, 将直流电机的动力传递给两个联动毛刷,使之具有良好的同步性和相向性,能够有效归拢收集较大垃圾或排泄物,如图7 所示。
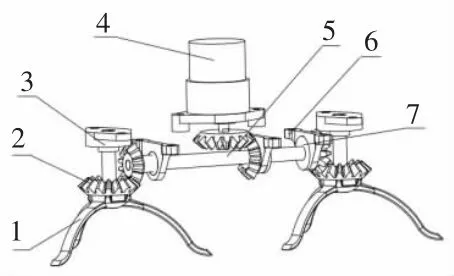
图7 锥齿轮联动毛刷Fig.7 Bevel gear linkage brush
(5)清理装置由滚筒刷、电机、吸盘组成,如图8 所示。 电机带动滚筒刷转动,放置于吸盘下方,用于檫拭地面,吸附毛发灰尘等,清洁室内卫生。
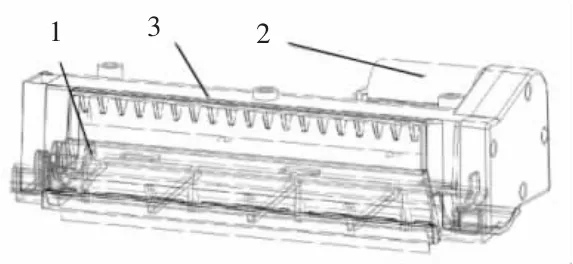
图8 清理装置Fig.8 Cleaning device
4 控制系统软件设计
(1)语音智能交互算子。利用树莓派开发板作为主控端,语音板作为接收器,当语音板内的麦克风接收到外界传来的唤醒词后, 传递到树莓派开发板进行数据分析处理,利用串口通信再把信号传输到Arduino 开发板,由Arduino 开发板驱动各模块来进行操作。利用语音交互系统还可以开启安全监控功能, 此时烟雾传感器及温度传感器可对室内安全实时检测,有情况发出警告通知用户。语音控制算法流程如图9 所示。
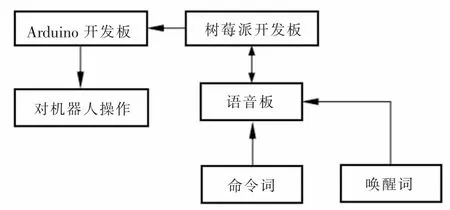
图9 语音控制算法流程图Fig.9 Flow chart of speech control algorithm
(2)视觉陪玩算子[4]。Openmv 视觉模块用于接收传入的图像,并对图像进行分析处理,返回特征值与设定值进行比对校正,由通信接口传递给Arduino 驱动电机,使机器人驶向小球,控制舵机进行抓球、抛球动作,实现对宠物的陪玩。 机器人移动控制算法流程如图10 所示。
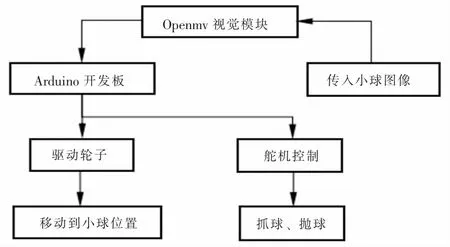
图10 移动控制算法流程图Fig.10 Flow chart of motion control algorithm
(3)自主定位导航算子。 机器人在室内环境中,以激光雷达为主导, 借助陀螺仪和红外线传感器等其他传感器,自主感知环境和自主定位,实时进行地图构建,然后将构建的地图返回到主控端存储起来。 地图用于在环境中定位,以及描述当前环境以便于规划航线。 在Openmv 视觉模块收到命令之前,也可以预先设定机器人在家执行预设路线。 自主定位导航控制算法流程如图11 所示。
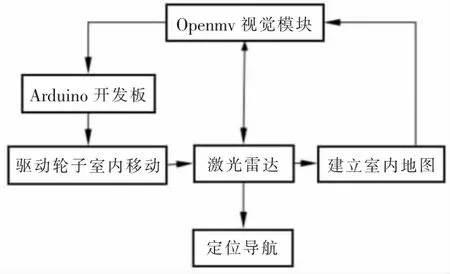
图11 自主定位导航控制算法流程图Fig.11 Autonomous positioning and navigation
5 结论
本文提出一种智能养宠机器人,通过语音智能交互、视觉识别及激光雷达自动导航等技术在机械本体结构上的应用,不仅实现了陪玩、清理宠物垃圾等照顾宠物的功能, 还具有自主导航及避障的功能。 若配置有烟雾传感器、温度传感器等,还可以时刻监视家中安全状况。 该机器人具有小巧玲珑、实用性强等特点,既能减少用户烦恼和负担,又可陪同宠物玩耍,使“铲屎官”们充分享受宠物带来的乐趣。 通过实验,验证了其操作的可行性,具有较高的应用价值。
