仿生爬杆机器人研究现状与未来发展
2022-01-04陈明豪CHENMinghao王卓WANGZhuo杨皓宇YANGHaoyu刘晓阳LIUXiaoyang
陈明豪CHEN Ming-hao;王卓WANG Zhuo;杨皓宇YANG Hao-yu;刘晓阳LIU Xiao-yang
(河北科技大学机械工程学院,石家庄 050018)
0 引言
随着国民经济迅速增长,人民生活水平的日益提高,为接轨“十四五”规划要求,政府逐步加强基础设施的建设,由此电线杆、指示牌等杆类数量激增。传统杆类设施的维护主要依靠人力劳作解决。在传统的登高作业中,施工工人通常以“脚扣”为辅助工具,攀爬到作业点。一般情况下,“脚扣”是较为便利的,但对施工工人控制平衡的能力要求较高,工人在作业时要是不够专注,出现晕眩,就会有坠落的风险。将仿生爬杆机器人应用于高空作业中,减少工人登高过程中消耗的体力和精力,避免事故发生,提高施工工人高空作业安全系数。因此,研究仿生自动爬杆机器人用来改善施工工人的劳动环境或替代人类进行高空作业,提高劳动生产率和安全性,为需高空作业的行业带来一次革命很有必要。
1 仿生爬杆机器人分类
仿生爬杆机器人属于第三代机器人——智能机器人中的一种,是通过模仿自然界中部分生物的形状结构、运动特征和行为方式等,从而能应用于实际生活、代替人类工作的爬杆机器人。从仿生学角度出发,可将爬杆机器人分为仿尺蠖式、仿蛇形、仿熊式等。
1.1 仿尺蠖式爬杆机器人
这类机器人设计原理为仿生蠕动原理,通常由几个模块组成,机器人两端手爪与杆件直接接触,使机器人能牢固地附着于物体表面;两端手爪间一般为曲柄摇杆机构连接,实现蠕动的攀爬步态。这类机器人能够适应不同直径或变径的杆类物体,并且可顺利通过法兰盘等障碍物,有较好的越障能力;但是对其运动的控制比较复杂,需要进行运动学分析,计算出运动方程,才能达到精准控制机器人的步态[1]。
1.2 仿蛇形爬杆机器人
仿蛇形爬杆机器人一般采用多个机构环抱杆件来维持其附着在杆件上,参考仿蛇运动六步态,通过缠绕软体执行器与杆件之间的摩擦力作为驱动力,实现机器人爬杆的功能。该类机器人拥有较快的爬行速度,其中的仿蛇缠绕软体爬杆机器人制作简单,控制简易,能适应不同摩擦度表面的各类杆件,但受材料限制,负载较小,在攀爬过程中只能携带有效载荷,无法跨越法兰盘等障碍物[2]。
1.3 仿熊式爬杆机器人
这类机器人根据熊的攀爬特性,类似于爪式爬杆机器人,通常以上下两层机械手作为抱紧机构,采用连杆结构实现折叠和伸展,达到攀爬的效果[3]。通过改变机械手的尺寸来适应不同杆径的杆状物,与现有爬杆机器人相比,有更好的负载能力,但由于依赖连杆机构实现伸缩,缺乏连续性。
2 国内外研究现状
仿生爬杆机器人是目前机器人发展的一个重要领域,这类爬杆机器人区别于平面爬行机器人,其需要克服重力作用,依附在垂直面或陡壁上并自主移动,代替人类完成高空作业。自二十世纪中期仿生机械兴起以来,国内外学者就开始了对爬杆机器人的研究,并取得了一定成果。
2008 年,王晓光、陈明森等设计出一种仿生蠕行式且适应变直径杆的爬行机器人[4],如图1 所示。该机器人模仿人爬树的动作,可以适应小倾角变直径杆件。09 年,程光明、朱志伟等人仿真出一款同样仿尺蠖步态的爬杆机器人[5],该机器人的两端为两组单向自锁机构,其头部和尾部之间为一个曲柄摇杆机构,使其能在定直径杆上稳定爬行,并能较好适应在腰鼓状变直径杆攀爬,如图2 所示。
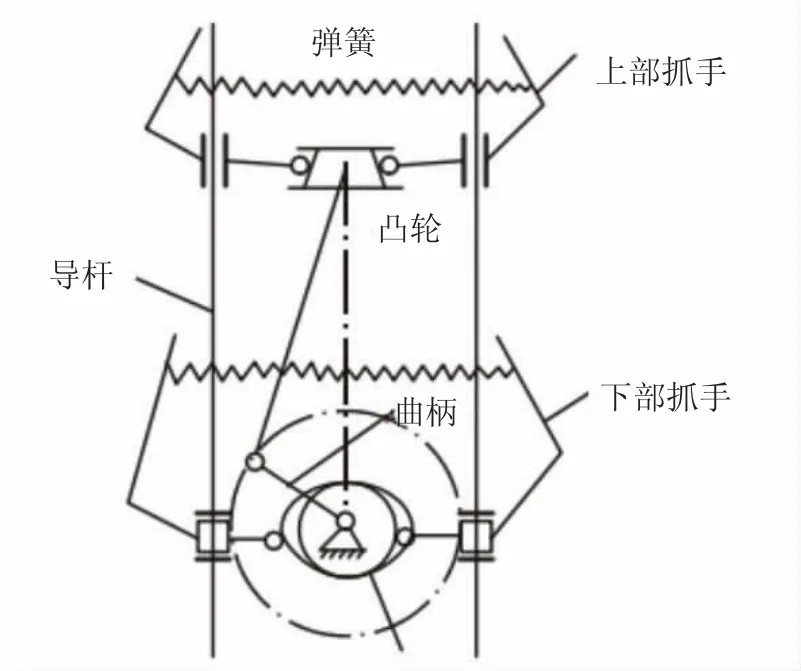
图1 蠕行式仿生爬杆机器人
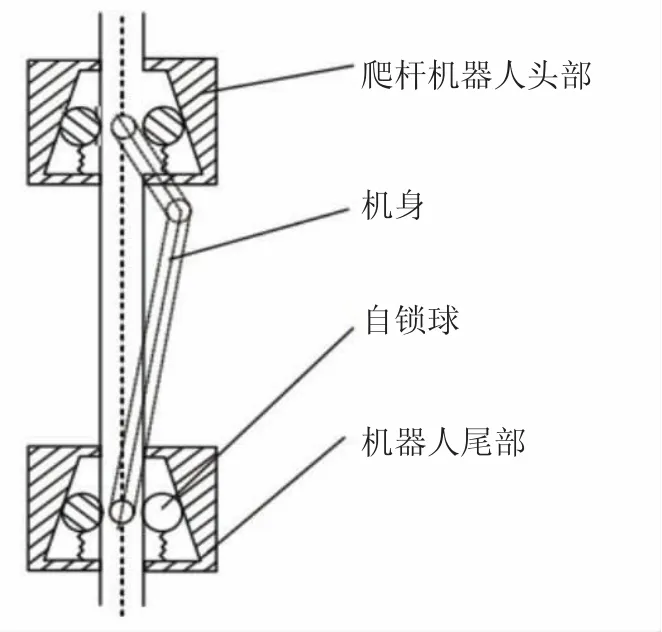
图2 仿尺蠖步态爬杆机器人
美国卡耐基梅隆大学[6]曾在蛇形机器人中引入模块化组合方式,将机器人分成16 个模块,如图3 所示,使之实现在空间内的移动、翻转以及游水,并可以沿杆翻转扭曲,这是攀爬式蛇形机器人领域中的重大突破。

图3 模块化蛇形机器人
以上机器人基本都以刚性机构连接,存在缺乏连续性和灵活性等问题,2020 年,廖冰[7]等人设计了一种系绳的气体驱动的仿蛇缠绕软体爬杆机器人,如图4 所示。设计者受树栖蛇的缠绕运动启发,设计2 个缠绕软体执行器替代蛇的头部、尾部和1 个伸缩软体执行器替代蛇的身体。通过运用仿蛇运动六步态,使得机器人能负重500g,并以每秒0.193 倍自身体长的最大速度在垂直方向上攀爬,能适应不同摩擦度表面、变直径和各种形状的杆件。
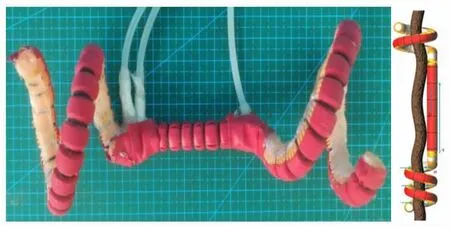
图4 仿蛇缠绕软体爬杆机器人
2020 年,林琦峰、陈勇[3]等人仿真出一款仿树袋熊爬杆机器人,如图5 所示,该机器人的抱紧结构为上下两端的机械手,区别于以往的连杆机构,采用齿轮齿条啮合控制机器人的升降。通过模仿树袋熊的攀爬特性,让机器人具有更好的灵活性,解决了轮式爬杆机器人的越障困难,改良了爪式爬杆机器人的抓取方式,为机器人普遍存在的负载较小的问题提供了解决方案。

图5 仿熊式爬杆机器人的结构示意图
RiSE 系列攀爬机器人是由美国伊利诺伊理工学院、卡耐基梅隆大学、斯坦福大学及宾夕法尼亚大学等[8]联合研发设计的一种机器人,如图6 所示。该系列机器人采用六足仿生攀爬,能很好地在平面及曲面结构上运动,它腿的端部有尖锐的钩爪结构,可以使机器人稳固地附着于杆状物表面。09 年,由设计师Boston Dynamics 等设计的Rise v3[9],如图7 所示,是rise 系列的一个重大突破,该机器人以狗为仿照对象,设计有四足,脚部使用外科手术针为材料使其能在垂直物体上移动。Rise v3 能以21cm/s 在木制线杆上攀爬,攀爬速度为当时世界第一。

图6 RiSE
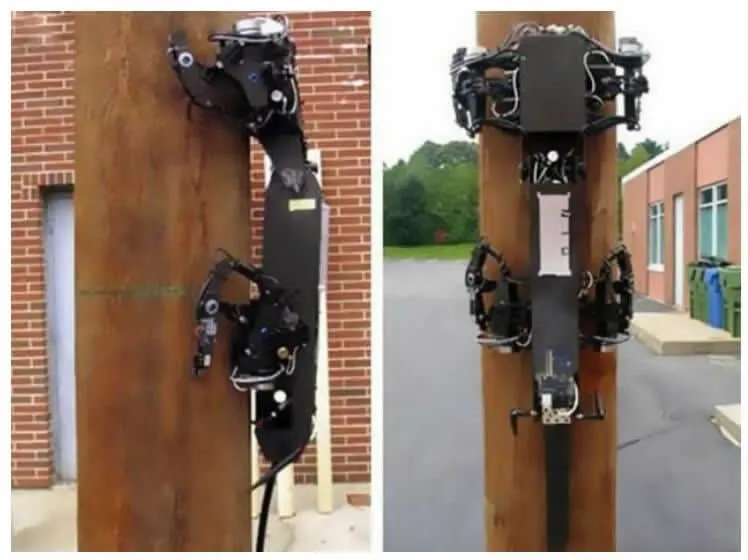
图7 Rise v3
3 仿生爬杆机器人的存在问题及发展趋势
目前,虽然国内外已设计出多种仿生爬杆机器人,但都存在各自的缺陷。例如,未设计携带工作设备的空间,仅能实现单一的爬杆功能,导致功能种类不齐全,只能适用于小范围的工作环境;机器人灵活性和稳定性不佳,在越障方面的问题仍未得到解决;由于其学科交叉性,许多机器人仅能做到“形似”,仿生对象的许多能力不能精准的表现出来。
但随着近几年科技的不断发展,人们在驱动、传感和控制软硬件[10]等领域有了极大发展,同时人们对于爬杆的一些特殊功能的需求也刺激了爬杆机器人的发展,经过多方验证,笔者将仿生爬杆机器人的未来发展趋势归纳为以下几点:
①新型仿生爬杆技术。目前存在的仿生爬杆机器人的爬杆方式缺点明显,对于攀爬变径杆和跨越障碍物等复杂问题的处理仍显乏力,因此加深对生物结构的研究并充分结合现代科学技术应用于机器人是当前仿生爬杆机器人发展的一个重要领域。自然界生物经过35 亿年的不断进化,部分生物已经具有最优化的结构、强大的适应能力和灵活的攀爬特性,由于对生物本质的认知不够深刻以及未能充分掌握并利用现有科学技术,导致现有仿生爬杆机器人数量较少、应用有限,故将现代机构学和机器人学的新成果应用于机器人运动特性的研究,实现机器人结构仿生、功能仿生和控制仿生的统一是当下仿生爬杆机器人新型技术发展的热点。
②新型仿生材料。现有的许多仿生爬杆机器人由钢材、塑料等传统的刚性材料制作而成,这使得有些部位无法像真正的生物部位一样灵活运动,造成机器人任务完成单一,适用性不强。为了使机器人具备高适应性、高效率、低能耗的特点,人们希望研制出更加接近生物性能的新型仿生材料,使仿生爬杆机器人与被模仿生物有更高的相似度。
③功能多样化。被研制出的仿生爬杆机器人大多应用于完成杆件清洗、维修等任务,但由于自重较大或者材料所限,只能携带较小的有效载荷,导致完成工作单一和无法适应一些恶劣环境。为了减少成本、提高效率,机器人在完成目标任务的同时应尽可能提高负重比、携带更多功能设备,向低能耗、高适应性方向发展。
④智能化。现有的仿生爬杆机器人基本无法实现自决策,对于一些突发情况无法做出即时反应。未来仿生爬杆机器人智能化发展应以人工智能技术、先进制造技术、自动化技术为基石,提高自我感知、自主学习、自行决策、自我优化与执行、自适应等能力,融入“5G”等智能+元素,使之更好地为人类服务。
4 结束语
仿生爬杆机器人领域已取得了丰硕的研究成果,由于现代机构学和机器人学的新成果与复杂的生物特征结合程度较低,仿生爬杆机器人领域仍存在许多未能解决的问题。在深入研究生物最本质的生命特征,并通过不断将新技术、新方法、新理论应用到仿生爬杆机器人的研究中后,这些问题将应刃而解,从而推动仿生爬杆机器人的研究向系统化、前沿化方向发展,机器人更加新型化、功能多样化、智能化,具有良好的人机交互能力,更好地为人类服务。