列车在站运行状态监测系统
2022-01-04马福龙荆长顺
赵 周,马福龙,荆长顺
(1. 中国铁路兰州集团有限公司 运输部,兰州 730000;2. 成都货安计量技术中心有限公司,成都 611731)
接发列车是铁路车站的基本行车作业。目前,既有铁路车站设备虽然能保证正常的接发列车作业,但依然采用传统的人工立岗、外勤接车作业方式,由人工观察列车车体状况、货物装载加固状态、走行部动态情况,并根据列车运行中的声音与气味,由人工主观判断列车的运行状态。人工接发列车作业方式存在“看不全”“看不清”“拿不准”的局限性及作业人员安全风险,且作业人员劳动强度大,受到人员疲劳、经验、责任心、疏忽等因素影响,容易出现漏检和误判,给铁路行车安全带来隐患[1]。随着铁路大面积提速和客运专线快速发展,面对日益增长的列车发送量及不断提高的列车运行速度,传统的人工接发列车作业方式存在的局限性及作业人员安全风险日益凸显。
为此,研究开发了列车在站运行状态监测系统。该系统能够实时检测运行列车的状态,实现机检代替人检,降低接发列车作业人员的劳动强度;通过与站内相关信息系统的有机融合,运用机器视觉技术,对涉及行车安全的列车关键部件进行动态检测,提高列车故障检测的识别率,提高检车作业质量和效率,及时消除安全隐患。
1 系统设计
1.1 系统构成
列车在站运行状态监测系统主要由数据采集子系统、智能分析子系统和监测终端子系统构成,系统构成图如图1所示。

图1 系统构成
(1)数据采集子系统:对通过检测区域的列车的车体状况、货物装载加固状态、车辆走行部动态情况、车辆运行中异常声响及车轮踏面温度进行实时数据采集、检测、传输和存储,主要由室外采集设备、室外采集附属设备、中央处理单元及室内存储与网络通信设备构成。其中,室外采集设备主要包括车轮传感器、面阵相机、线阵相机、车轮踏面温度探测装置(简称:热轮探测装置)、声音传感器、激光雷达等;室外采集附属设备主要包括钢架、电控箱、防雷装置、线阵光源等;室外采集设备及采集附属设备安装在车站进站信号机外方。中央处理单元由处理器、存储器、输入输出单元、电源、通信单元电路等组成,是控制逻辑运算中心,完成各项数据采集功能的逻辑控制;室内存储与网络通信设备主要包括数据库服务器、应用服务器、图像管理服务器、算法处理服务器、数据交换设备、网络通信及接口设备等,中央处理单元及室内存储与网络通信设备安装在车站中心机房。
(2)智能分析子系统:主要包括深度学习服务器、自动识别模块以及用于算法训练和验证的样本库,完成车辆车体及走行部等关键部件的异常识别与分析处理。
(3)监测终端子系统:主要包括管理终端、实时作业终端和复示终端等;其中,管理终端主要安装在车站值班调度室,实时作业终端主要安装在车站监控中心[2]。
1.2 系统逻辑架构
监测终端子系统采用B/S架构及Visual C#语言开发,使用基于ExtJS的Web desktop应用框架;智能分析子系统逻辑功能使用Visual C#语言开发,实现图像分析、车辆运行声音分析及车轮踏面温度分析等;数据采集子系统采用C/S架构及Visual C++语言开发,实现列车车体图像、货物装载加固状态、走行部动态情况、车轮踏面温度及车辆运行声音的数据采集和管理[3]。
按逻辑功能层次,系统可划分为业务应用层、数据管理层、数据分析层、数据传输层、数据采集层及前端设备层,如图2所示。

图2 系统逻辑架构
(1)前端设备层:由前端采集设备和装置组成,提供基础硬件环境。
(2)数据采集层:利用图像、视频采集软件,车轮踏面温度、车辆运行声音、限界检测软件及车位判别软件,完成前端设备数据采集,将采集到的数据发送至消息中间件;由图像管理服务器内置的车辆图像分割拼接程序完成车辆图像分割与拼接,将处理后的车辆图像存储至消息中间件。
(3)数据传输层:将所有采集的数据发送至后台服务器消息中间件,由应用系统主适配软件进行深度解析和分类处理,并将处理结果推送给智能算法识别系统;通过信息共享接口定时获取列车到达预确报报文信息,并将报文信息上传给数据库服务器,通过接口处理程序解析入库,实现车号、车型、发到站及货物品名的匹配。
(4)数据分析层:智能识别与分析软件利用数据挖掘、机器学习、图像识别等技术,通过内置的预处理程序、智能识别程序、智能分析程序对图像、声音、视频信息进行智能分析,并识别、自动标注异常信息,输出检测分析结果到监测终端子系统。
(5)数据管理层:将分析处理后的结构化数据保存到数据库中,将非结构化数据保存到图像管理服务器上,非结构化数据可以通过结构化数据中关联的URL地址进行访问。
(6)业务应用层:针对各类应用场景,采用二维表格、统计图表、二维/三维动态图等方式多角度展示监测信息,为铁路货运安全和调度管理提供支持[4]。
2 工作原理及智能分析数据处理流程
2.1 工作原理
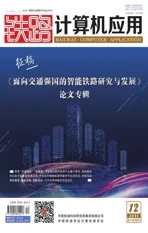
车站进站信号机外侧安装有高清面阵相机、红外线阵相机、声音传感器、热轮探测装置、车号识别装置、线阵光源、线阵灯光补偿单元及网络设备,自动采集通过列车的运行状态信息,并传输至中央处理单元。系统工作原理如图3所示。
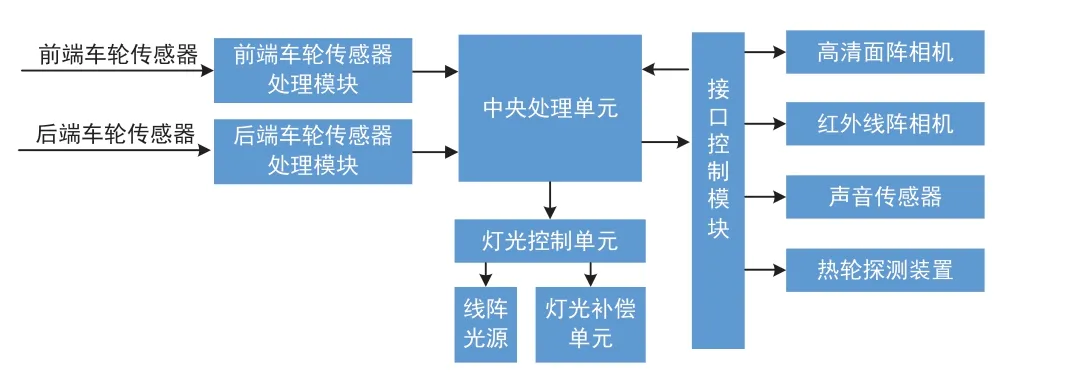
图3 系统工作原理
(1)当列车进入检测区域时,前端车轮传感器将检测到的列车接近信号实时传送给中央处理单元;中央处理单元记录通过车辆轴数,经处理转换后,生成列车接近启动命令,控制前端采集设备动作,自动采集通过列车的车体图像、货物装载加固状态、列车走行部动态情况、车轮踏面温度及声音数据信息。当列车通过检测区域时,后端车轮传感器检测出通过列车的轴数,并实时传送给中央处理单元;中央处理单元对比前后端车轮传感器所检测到的车辆轴数,当车辆轴数相等时,表明整列列车已经通过检测区域,中央处理单元生成列车通过结束命令,控制前端采集设备动作,停止信息采集,向灯光控制单元发出关闭所有光源指令,关闭系统照明光源。
(2)通过以太网,将所有采集的数据信息、状态信息传输至车站中心机房后台服务器消息中间件和应用系统,由主适配软件进行深度解析和分类处理(预处理),并将预处理后的采集数据推送给智能分析子系统。
(3)智能分析子系统利用数据挖掘、机器学习、图像识别等技术,通过内置的预处理程序、智能识别算法程序、智能分析算法程序对图像、声音、视频信息进行智能分析,并识别、自动标注异常状态,输出检测分析结果,由监测终端对异常状况进行告警和展示。
(4)为了节约能源,系统设置了灯光控制单元。夜晚当列车接近检测区域时,中央处理单元向灯光控制单元发出开灯指令,开启现场光源系统;当列车通过检测区域后,中央处理单元向灯光控制单元发出关灯指令,关闭现场光源系统。另外,当系统应用于2股道检测时,总有一侧远离光源系统,影响现场光照强度,此时灯光控制单元将控制远离光源一侧的灯光补偿单元灯光开启,增加现场光照强度,确保所采集的图像满足识别要求。
2.2 智能分析数据处理流程
智能分析是系统的核心功能,完成图像预处理、部件定位、异常检测、异常形式分类等数据处理,并将数据处理结果写入关系型数据库,提供给监测终端子系统进行展示。
智能分析数据处理任务主要包括采集数据监听、图像分析处理与异常处理3部分。采集数据监听任务主要监听消息中间件队列中是否有图像数据和过车信息,通过事件触发调用图像分析处理与异常处理任务。异常处理任务包括异音检测处理和视频分析处理。智能分析数据处理流程如图4所示[5]。
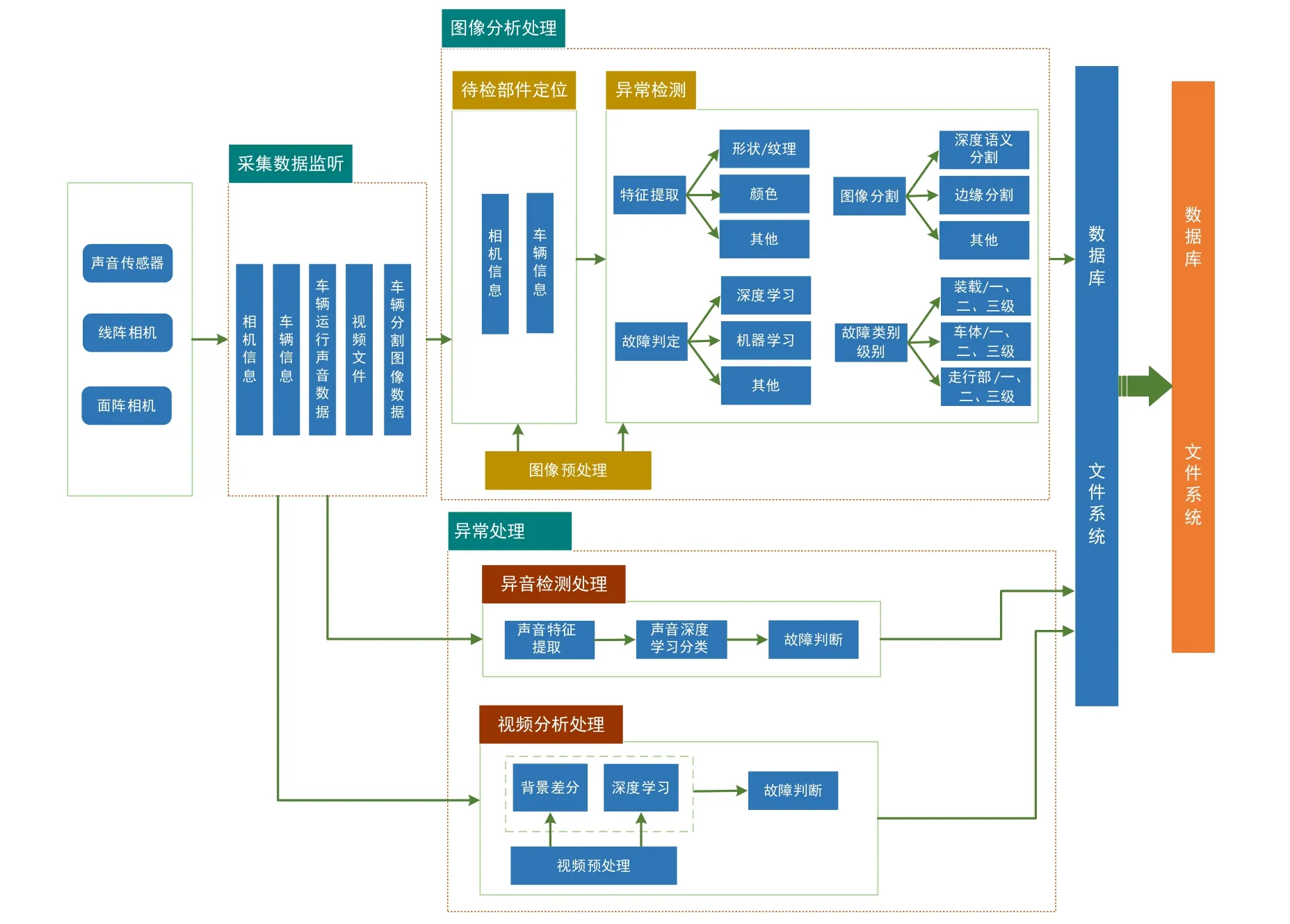
图4 智能分析数据处理流程
(1)数据采集监听:图像管理服务器将分割的图像、面阵视频、声音数据、列车信息(包含车号、发到站、品名等)写入消息中间件队列,数据采集监听程序检测到有新的数据写入消息中间件时,激活数据分析处理任务。
(2)图像分析处理:提取线阵相机数据,对分割后的车厢图像进行待检部件定位,并完成待检部件的故障判别,并将检测结果存入关系型数据库。图像分析处理主要包括待检部位定位和异常检测2部分:a. 待检部位定位是智能分析子系统的一个功能,主要是提取图像中待检目标的ROI,将待检目标的属性、位置信息提供给其它算法模块,用于部件识别和失效形式的判断;b. 异常检测通过对待检部件进行图像预处理、部件定位,从采集的图像中提取特征信息,完成待检部件深度学习、分类和故障点判断。异常检测模块激活后,会提取信息中的车体数据、面阵相机数据,对分割后的车厢图像进行目标定位,完成待检部件对应故障点检测。
(3)异音检测处理:读取声音文件,先进行特征提取,然后进行深度学习分类,根据阈值、规则等完成故障判断,并将处理结果存入关系型数据库。
(4)视频分析处理:读取视频文件,对视频图像进行预处理,增强视频和去除杂点,然后进行背景建模、深度学习检测等分析,完成待检目标对应故障点检测,并将处理结果存入关系型数据库。
3 系统功能
3.1 功能构成
系统由智能分析子系统、监测终端子系统及数据采集子系统组成,这3个子系统相互协作,共同配合,完成图像、视频、声音、轮温等数据自动采集、传输、存储、识别、分析和输出一系列功能,系统功能结构如图5所示。
图5 系统功能结构
3.2 数据采集
(1)车位判别:列车通过时,对车轮传感器信号进行采集和处理,记录列车通过轴数,计算列车通过速度、轴距和辆数,向中央处理单元发出列车接近和通过控制信号。
(2)车号采集:中央处理单元接收到列车接近和通过信号时,控制AEI主机开机,自动读取通过列车车辆底部标签,解析获取车辆车号。
(3)图像采集:利用高清线阵相机,对通过列车车体、走行部、车顶等主要的可视部件进行拍照,用于车辆关键部件识别和异常状况检测。
(4)视频采集:利用高清面阵像机,采集列车运行方向上部视频图像,用于对货车的货物装载加固状态、篷布苫盖情况、列车尾部标识情况等进行实时监测。
(5)轮温采集:利用热轮探测装置自动采集通过车辆的车轮踏面温度数据,用于对运行中车轮踏面温度异常的车辆进行识别和报警。
(6)声音采集:利用声音传感器对列车通过时车体部件摩擦声音、轮轴摩擦声音进行采集,用于对运行中存在异常声响的车辆进行识别和报警。
(7)限界采集:利用激光扫描雷达技术,实现列车运行状态下的车辆三维轮廓扫描,用于与机车车辆限界进行对比,判断机车车辆是否超限界及超限等级。
3.3 智能分析
(1)图像分析:对采集的列车图像数据进行处理,检测是否存在棚车车门开启、敞车车窗开启、车门搭扣未落槽、罐车阀盖开启、货车风管未连接等异常情况,并将检测结果存入消息中间件中。
(2)声音分析:处理采集到的列车通过检测区的声音数据,根据阈值和规则,自动检测其中是否存在异常声响,并将检测结果存入消息中间件。
(3)视频分析:读取视频文件,对视频图像进行增强、去除杂点等预处理,通过背景建模、深度学习等技术,自动完成待检部件对应故障点检测,并将检测结果存入消息中间件。
3.4 监测与报警
(1)列车图像管理:可按指定的车次、时间段及检测点,对列车图像进行播放、回放和慢放;根据需要,可对问题车图像进行抓拍,将抓拍到的图片保存至样本库,为图像识别提供不断丰富的素材样本,以进一步提高问题车辆识别的准确性。
(2)问题车报警:可按指定的车次、检测时间及问题类别,对系统自动识别的问题车进行告警,作业人员根据告警提示信息,对问题车进行确认和登记。
(3)轮温监测与报警:实时展示车轮踏面温度分析结果,对车轮踏面温度超过阈值的车辆进行告警,作业人员根据告警提示信息,对问题车进行确认和登记。
(4)异音监测与报警:实时展示车辆运行声音分析结果,对运行中存在异常声响的车辆进行告警,作业人员根据告警提示信息,对问题车进行确认和登记。
(5)装载超限监测与报警:可按指定的车次、检测时间及检测点,对装载超限的车辆进行告警,作业人员根据告警提示信息,对问题车进行确认和登记。
(6)设备状态监测与报警:以图形化形式,按检测点实时展示其采集设备及服务器设备运行状态,对存在问题的设备进行告警提示;设备状态以不同颜色展示,正常运行的设备以绿色标识,问题设备以红色标识。
(7)问题车统计分析:按车型、问题类别等多个维度,对识别出的问题车辆进行统计分析[6]。
4 关键技术
4.1 车辆图像分割与拼接
车辆图像拼接是把多幅按时间顺序排列的窄视角车辆图片拼接成一幅完整的车辆图像。由于车辆是水平方向移动,车辆图像的拼接可根据视频序列中前后两帧车辆图像的水平位移量dx,即从前一帧图像中剪出长度为dx的图像块贴到下一帧图像中,如此反复直至完成整节车辆图像的拼接。
车辆图像拼接算法为:先提取车辆图像上的角点,然后前后两帧对角点进行匹配,根据匹配上的角点即可求出帧间位移dx,实现车辆图像自动分割与拼接,获取每节车辆的完整图像。
车辆图像角点的确定是该算法的难点。因为角点是车辆二维图像上亮度变化剧烈的点,或是图像边缘曲线上具有曲率极大值的点。图像匹配是对前后两帧车辆图像中的特征点进行匹配,为保证匹配的准确性,所选择的特征点须具独特性,而角点可以作为一种不错的特征。考虑到车辆是水平方向运动,采用最为简单的Harris Corner算法提取角点。当车辆发生[u,v]移动时,移动前和移动后对应的窗口中的像素点都会引起比较大的灰度变换,对于[x,y]平移[u,v]个单位后,强度变换公式为

其中,w(x,y)是窗口函数,I(x+u,y+v)是平移后的强度,I(x,y)是原图像像素。
对于I(x+u,y+v) -I(x,y)的值,如果是强度恒定的区域,那么它就接近于零,反之如果强度变化剧烈,E(u,v)值会非常大,也就是方程右侧的第二项的取值最大。对公式(1)进行泰勒级数展开,通过数学换算,可得到

利用公式(3)判断一个窗口是否包含边角。

其 中,det(M)=λ1λ2,trace(M)= λ1+λ2,λ1和λ2是M的特征值。
(1)当|R|很小,也就是介于λ1和λ2之间,该区域是平面;
(2)当R<0,也就是当λ1≫λ2或相反时,该区域是边缘;
(3)当R很大,即当λ1和λ2都很大并且R介于λ1~λ2之间,该区域是边角。
4.2 图像畸变矫正
在特定场景下,受环境因素、车速变化等原因的影响,采集到的列车图像会发生畸变,严重影响图像识别的准确性。为此,提出一种基于目标检测和模板匹配的线阵图像畸变校正方法,具体算法过程描述如下:
(1)对采集的列车图像数据依次进行标注、数据增强和多尺度变换后,利用RetinaNet网络完成车辆检测模型和柱体检测模型的训练;
(2)在采集的图像中筛选出不同车型模板图像和待校正的畸变图像,车型模板图像应清晰完整,没有畸变;利用训练好的车型模板图像对正常和畸变图像分别检测车厢和车身柱体,在待检测的车辆范围内,相邻柱体之间以及两侧柱体与车侧之间分别切分为一个区域,每张图像被切分为7个图块;
(3)选定初始截断步长,从图像像素点第一列开始,分别按列截取待校正图像和模板图像,对截取后的待校正图像在x方向乘以变化系数c进行resize处理;其中,c取值为设定的[a,b](0<a<1,b>1)区间内,以一定步长截取的各数值,resize处理采用4×4像素邻域的双三次插值,对待插值的像素点(x,y),取其附近的4×4邻域点(xi,yj),i、j= 0,1,2,3;插值计算公式为[7-8]

其中,W(x)为插值基函数,表达式为

其中,a取值为-0.5。
4.3 高速数据处理
对于干线铁路,车站每天有大量列车通过。列车通过时,要在非常短的时间内完成大量的车辆运行状态数据的采集和传输。为确保这些数据快速、稳定、安全传输和存储,采用了Kafka消息中间件[9]。
当列车通过检测区域时,数据采集子系统实时采集车辆图像、视频、车轮踏面温度、车辆运行声音、车辆限界等数据,并将这些数据实时传输给Kafka消息中间件,智能分析子系统从Kafka消息队列中读取前端采集的各类数据并进行处理,高速数据处理过程如图6所示。
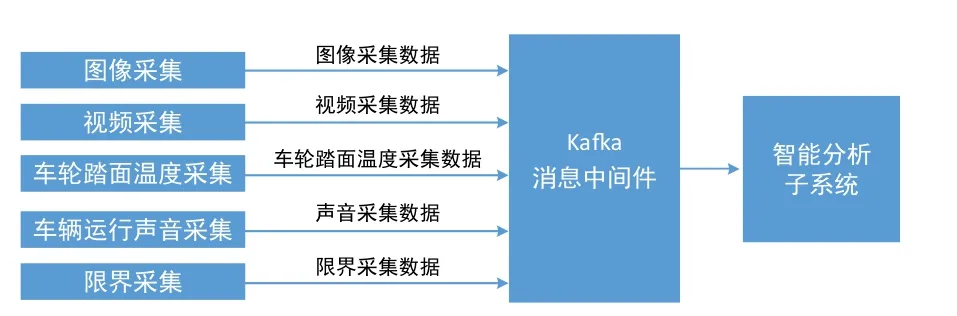
图6 高速数据处理过程
Kafka消息中间件具有高吞吐量、低延迟、高并发、容错性强、稳定可靠的特点,能够在秒级内处理几十万条消息,延迟只有几毫秒,且支持数千个客户端同时读写,获取的消息被持久化到本地磁盘,支持数据备份,防止数据丢失,具有优越的高速数据 处理性能。
5 结束语
为解决铁路车站传统人工立岗、外勤接发列车作业存在的局限性及安全风险,运用图像识别、数据挖掘、算法分析及系统集成技术,提出列车在站运行状态监测系统方案,描述了系统构成、逻辑架构、工作原理、智能分析数据处理流程及主要功能。该系统的应用实现了列车接发作业从“人检”向“机检”,“室外”向“室内”,“静态”向“动态”的转变,实现了接发列车作业智能化管理,有助于提升铁路车站列车接发作业的质量、效率及安全保障能力。
目前,该系统已在兰州局集团公司陇南车站上线试运行,系统运行稳定,安全可靠,试用情况良好,验证了系统数据采集和处理的准确性及功能的完备性。下一步,将根据系统在实际运行过程中出现的问题,对智能分析算法进行深入分析和研究,提升算法的有效性和效率,进一步降低各类安全问题的误报率,持续优化和完善系统。