一种酒醅上甑机器人的结构分析与应用
2022-01-04张志勇高志远夏元金安徽金种子酒业股份有限公司
文/张志勇 高志远 李 增 李 遥 夏元金(安徽金种子酒业股份有限公司)
中国白酒是世界六大蒸馏酒之一,风味独特,经济价值高。固态蒸馏是将粮谷类作物通过发酵后所得到的酒醅装入甑桶内,通过甑桶蒸馏来提取酒醅颗粒内部的乙醇和各类风味物质的过程。蒸馏是白酒酿造的关键工艺环节,而蒸馏效率的关键又在于上甑操作。目前,白酒酿造领域存在传统的人工上甑和机械化上甑两种不同的上甑方式。传统的人工上甑方法由酿酒师傅用撮箕将酒醅一层一层地均匀铺在甑桶内,需满足“探汽上甑,均撒匀铺”的操作要求,以达到产酒、提香的目的。人工上甑的劳动强度大,且酒质和产酒率均受人为因素影响较大;机械化上甑分为智能化程度高的机器人上甑和简易的机械化设备上甑,抖动式、旋转式为应用较广泛的两类上甑机器人。既往的实际生产中,机器人上甑往往存在“探汽不准、铺料不均”等问题,影响酒质和产酒率。如何实现人工与机械的有效结合,协调完成上甑操作并避免“探汽不准、铺料不均”等问题,满足上甑操作的工艺要求,是白酒酿酒行业急需解决的重要问题。
为此,我单位引进了某型号酒醅上甑机器人,并从其主要结构特点、工作原理和生产应用等方面进行分析和探讨。应用结果表明,该酒醅上甑机器人具有结构简单、易操作、易清洗、减轻工人劳动强度等特点,提高了固态发酵酒醅的上甑效率,并有利于防止原酒的蒸馏损失,设备的操作安全性能较高。
一、对上甑机器人的要求
作为白酒酿造的核心工序,上甑对有效保证酒的质量和产量具有重要作用。传统的上甑工艺大多采用人工布料方式,人工酒醅上甑劳动强度较大,生产效率、质量和出酒率受人为因素影响大,人工成本高、招工难、企业负担较重。目前市场已有的上甑机器人多采用“标准多关节机器人配末端执行布料机构”的形式来实现布料,其不足在于:每次布料时均需要预先接满酒醅料,且仅能实现一个机器人布一个甑,效率较低;未能对甑内温度实现智能化监控,布料效果欠佳,出酒率与人工布料相比不具优势。引进的酒醅上甑机器人避免了上甑过程中人为因素造成的不良影响,降低了用工成本,有助于实现酿酒的全面机械化和自动化,解决目前市场上上甑机器人布料效率低的不足,提高了出酒率。
二、上甑机器人的结构特点、工作原理及其应用
1.结构特点
图1 左图为酒醅上甑机器人的主要结构,其中立柱部分是由动臂和定臂构成的立柱和用于升降立柱高度的立柱升降机构组成,大臂部包括大臂支座、螺旋输送机构,小臂部包括小臂旋转机构、小臂摆动机构、落料斗等。基座设置于立柱的下方,立柱的上方通过大臂旋转机构与大臂的一端连接,大臂的另一端固定连接小臂连接座,小臂连接座通过小臂旋转机构与小臂连接。小臂主轴为空心轴,其下端通过小臂摆动机构连接落料斗。螺旋输送机构设置于大臂支座的上部,其进料端设有进料斗,其出料端通过小臂主轴连通落料斗。
图1 右图为立柱的详细结构,立柱升降机构包括平衡气缸和丝杠螺母,平衡气缸位于基座内,其活塞杆通过气缸顶套和顶套法兰与动臂相连,动臂上端面与大臂部相连。丝杠螺母的丝杠通过联轴器与上下电机相连,丝杠螺母通过上下滑座与动臂相连。
图2 是酒醅上甑机器人大臂部与小臂部的主要结构。大臂旋转机构包括位于大臂支座内的旋转电机和RV 减速机,旋转电机通过旋转电机过度法兰与RV 减速机的输入端连接,RV 减速机外圆与大臂支座相连,RV 减速机内圆端面与动臂相连。小臂旋转机构设置于小臂连接座上,其包括旋转电机减速机组、皮带轮组,旋转电机减速机组通过皮带轮组驱动小臂主轴旋转。小臂摆动机构包括相互连接的摆动电机减速机组和减速机吊耳,减速机吊耳固定于小臂主轴上,摆动电机减速机组与落料斗直接连接。
2.工作原理
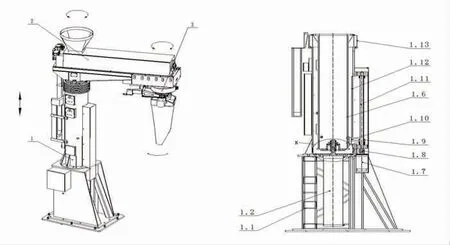
图1 酒醅上甑机器人的主要结构
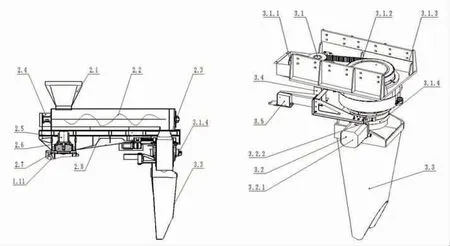
图2 酒醅上甑机器人大臂部与小臂部的主要结构
皮带输送机是配套设备,可以将酒醅输送到上甑机器人的进料斗(模仿工人运送酒醅),再经过机器人上甑将酒醅均匀铺撒在酒甑里(模仿上甑技师作业)。配套设置的热源检测识别系统主要用于检测蒸汽分布情况,并引导布料头将酒醅准确布撒到将要穿汽的地方(相当于上甑技师的眼睛)。配套设置的工作面形态探测系统,可以检测酒醅铺撒的厚度或均匀性(相当于上甑技师的眼睛)。该型号酒醅上甑机器人的立柱部可以实现升降运动,能随着酒醅布料层面增高而上升(模仿人起身和俯身);大臂部可以实现180°旋转,能够在两个酒甑间切换(模仿一人照看两甑);小臂部有两个动作,360°旋转和90°摆动,可以模仿人工在酒甑上实现布料动作(模仿人工手动铺料)。
热源探测识别系统主要用于检测蒸汽分布情况,红外传感器用于识别热源位置并向控制器发送实时数据,热源探测识别系统的激光测距传感器用于感知距离并向控制器发送实时数据,引导布料头将酒醅准确布撒到将要穿汽的地方。控制器通过其内嵌的软件结合红外传感器和激光测距传感器传来的实时数据计算出热源的绝对坐标,同时屏蔽掉红外传感感知的罐体内壁的余温,实现“见汽压醅”,温差布料法避免了酒精蒸汽散失,提高了出酒率。
3.应用分析
白酒蒸馏的摘酒操作是酿酒的重要环节,传统的“看花摘酒、量质摘酒和分段摘酒”通常取决于摘酒工的水平和经验,难以保证出酒率和优质酒率。应用机器人上甑后,蒸馏过程中酒花均匀、过酒较快,摘酒操作较好掌握。在生产应用过程中,该型号酒醅上甑机器人还具有如下显著特点:
(1)模仿人工作业。上甑设备能自动上甑,一台上甑机器人负责2 个或3 个酒甑,无须人工辅助;布料头可以实现360°旋转和90°摆动,模仿人工布料动作,也可以自动升降,随着酒醅布料层面增高而上升,出料口自动跟随贴近料面布料,保证不砸料、不堆积、不起团;酒醅输送通过输送机可实现连续供料,将酒醅送到甑口;上甑时间可根据工艺要求在30~40 min/甑范围内调节。
(2)遵循传统工艺。采用热源识别系统来检测蒸汽分布情况,并引导布料头将酒醅准确布撒到将要穿汽的地方,实现连续“探气上甑”;采用工作面形态监测系统来检测酒醅铺撒的厚度或均匀性;可自动控制酒甑、甑盖、蒸汽大小等,也能单独手动控制,实现蒸汽控制与机器人布料动作联动。
(3)安全性较高。机器人布料时运动部分只能在酒甑直径范围内移动,不超出甑体范围,所有设备活动范围有警示标志,配套有机械安全防护和电气安全防护,运行安全;设备与原料接触部分采用食品级材质设计制作,设备也具备防酸、防腐、防潮等特性,卫生安全。
(4)设备清洗方便。具有自动清洁功能,能完成80%的清洁工作,省时省力。
(5)软件配置可靠。软件配备主要有机器人控制器、控制软件、热源检测识别系统、工作形态探测系统,具有独立知识产权,性能稳定可靠。
酒醅上甑机器人在进行上甑操作时,首先通过立柱升降机构调节立柱的高度,以使机器人能适应相应蒸馏甑的作业要求,小臂上的热源感知系统和激光测距系统动态监测甑内温度并迅速确定最高温度坐标位置;随后,大臂旋转机构驱动大臂旋转到落料区,小臂旋转机构驱动小臂旋转,对落料方向进行进一步调整;最后,小臂摆动机构驱动落料斗摆动,实现最终均匀、高效地布料。如此循环作业。由于安装了红外成像设备,当感知到酒甑温度开始变化、酒醅下已有蒸汽但还未冒出时,上甑机器人的布料机构装置迅速而均匀地将酒醅铺撒在酒甑内,如此往复相应动作,最后盖上甑盖进行蒸馏。表1 是采用机器人上甑的使用效果。
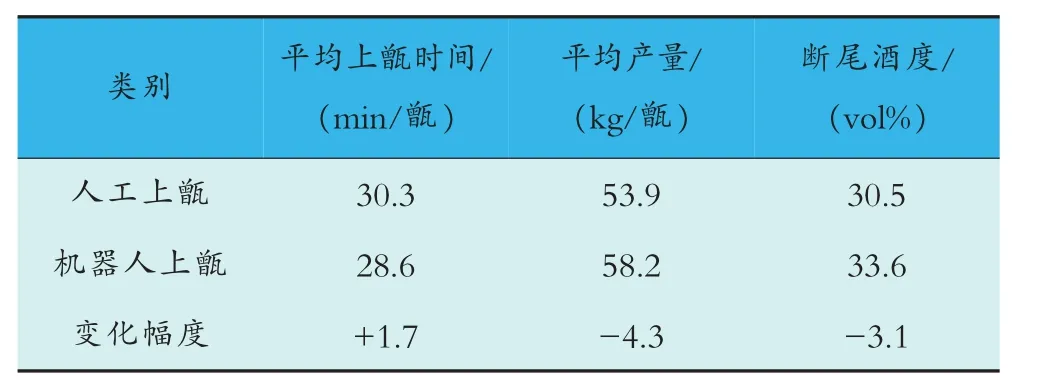
表1 采用机器人上甑的使用效果(清香型酿酒车间)
由表1 中的使用效果分析可知,机器人上甑的单甑产量较人工上甑的单甑产量平均高出4.3 kg 左右,机器人上甑时间比人工上甑时间少1.7 min,机器人上甑产量与时间均符合工艺要求;同时,机器人上甑出酒率与断尾浓度均优于人工上甑。
三、结语
机器人技术应用于白酒酿造领域,对解决酿酒行业的工作环境差、招工难等问题具有积极的现实意义,对白酒酿造设备向机械化、智能化酿造成套设备转型也具有重要意义。当前,酒醅上甑机器人配旋转酒甑是应用较好的蒸馏方式,但实现精准探气和精细化铺料操作等较难控制,尤其是应用于某些物料黏度较大的香型白酒时更难控制。因此,还需要进一步改良上甑机器人,以更好地满足各种香型白酒酒醅的上甑工艺要求。实现精准探气、精细铺料、解决漏气等问题是酒醅上甑机器人提高上甑质量的关键。上甑机器人在白酒酿造生产中的应用,有利于推动白酒酿造行业的机械化,为我国白酒产业的快速发展提供动力。
