一种城轨用永磁辅助同步磁阻电机控制策略研究
2021-12-31柴璐军张瑞峰詹哲军寇金华杨高兴
柴璐军,张瑞峰,詹哲军,寇金华,杨高兴
(中车永济电机有限公司,陕西 西安 710016)
永磁辅助同步磁阻电机(permanent magnet assisted synchronous reluctance motor,PMaSynRM)是近年来各国顶尖新能源企业最新研究方向,作为一种少稀土消耗高磁阻转矩的新型电机,与永磁同步电机相比,PMaSynRM可减少永磁体用量,显著降低电机的反电势,充分利用磁阻转矩,高速运行时更加可靠安全;其凸极比高,调速范围更宽[1];相比于异步电机,PMaSynRM具有效率高、重量轻、体积小、功率密度高等显著优点[2]。
城轨车辆一列车装配数十台电机,具有站间距离短、客运量大、行车密度大等特点,随着城市轨道交通快速发展,对电传动系统的可靠、安全、节能、成本、性能等提出更高要求[3],因此PMaSyn-RM在城市轨道交通领域有广阔的应用前景;目前中车永济电机有限公司已设计出适用于城轨车辆的PMaSynRM样机,永磁体用量仅为对标永磁同步电机的三分之一。
受逆变器功率模块散热影响,城轨电传动系统有低开关频率、高速运行载波比低的特点,本文提出一种适用于城轨PMaSynRM的矢量控制策略,主要分为控制算法与调制算法,并在180 kW城轨PMaSynRM电传动系统实验平台验证所述控制策略的可行性。
1 永磁辅助同步磁阻电机数学模型及工作点分析
1.1 永磁辅助同步磁阻电机数学模型
PMaSynRM作为一种新型的被控对象,在d-q坐标系下动态数学电压公式如下:

式中:ud,uq分别为d,q轴电压;id,iq分别为d,q轴电流;Rs为定子电阻值;Ld,Lq分别为d,q轴电感;p为微分算子;Ψf为转子永磁体磁链;ωe为同步电角速度。
在d-q坐标系下转矩公式如下:

式中:Te为电磁转矩;np为极对数。
由式(2)可知,PMaSynRM转矩由永磁转矩与磁阻转矩构成,提高磁阻转矩占比,永磁转矩占比就可降低,永磁体用量就会减小,可降低电机成本。
PMaSynRM的d-q坐标系下稳态电压公式如下:

由式(3)可知,永磁体用量减小,可降低电机反电势、降低系统高速运行时的风险。
1.2 永磁辅助同步磁阻电机工作点分析
PMaSynRM运行时电流轨迹受电流极限圆与电压极限圆限制,分别如下两式所示:
式中:is为定子电流;ismax为峰值电流,受逆变器输出能力和电机最大电流共同限制;us为定子电压;usmax为逆变器输出的最大电压,电机运行在方波工况时,usmax为2udc/π。
PMaSynRM电流轨迹如图1所示。(-Ψf/Ld,0)为电压极限圆圆心,OA1由不同等转矩曲线与不同幅值电流圆的切点组成,OA1上每点都能实现最大转矩电流比(maximum torque per ampere,MTPA)控制,A1点为恒转矩曲线Teb与电流极限圆的切点,ωb为A1点转速,定义为基速,该点端电压us与电流is达到最大值;当转速小于ωb时电机工作点主要受电流极限圆约束,随着转速升高大于ωb时,us达到usmax,工作点受电流极限圆和电压极限圆共同制约,进入弱磁控制,如A1A2段电流轨迹所示,通过增加id,减弱气隙磁场,电机才可继续升速[4],随着转速继续上升,电流轨迹进入A2A3段,A2A3上每点为恒转矩曲线与电压极限圆的切点,定子端电压饱和情况下转矩输出最大值[5],为最大转矩电压比(maximum torque per voltage,MTPV)控制。A1A2A3段为电机外特性工作点,在全速度范围内输出最大转矩值,BC,DE段为恒转矩弱磁电流轨迹,处于电机外特性内,电机输出转矩维持不变。

图1 PMaSynRM电流轨迹Fig.1 Current trace of PMaSynRM
2 永磁辅助同步磁阻电机控制策略
PMaSynRM控制策略主要分为控制算法与多模式调制算法,两者独立设计,本文控制算法仅介绍MTPA控制算法,控制芯片采用TMS320F28335,控制算法在定时器中断中完成,调制算法在EPWM中断中完成,整体控制策略所图2所示,控制切换模块完成MTPA控制和弱磁控制相互切换。
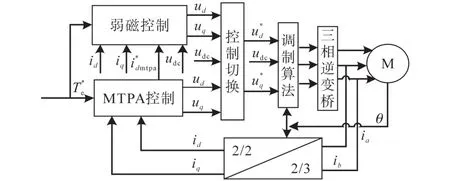
图2控制框图Fig.2 Control block diagram
2.1 永磁辅助同步磁阻电机MTPA控制策略
MTPA控制策略下PMaSynRM输出相同转矩所用电流幅值最小,MTPA曲线为双曲线的一支,牵引工况电流轨迹处于第二象限,制动时处于第三象限。id,iq满足下式:
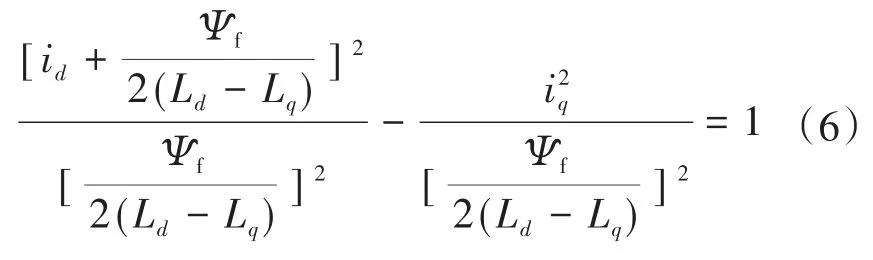
由式(6)可知,MTPA控制下电流轨迹由电机参数Ld,Lq,Ψf决定,而定子电流幅值与相位变化会引起定子铁心磁饱和效应,导致Ld,Lq的值发生变化,PMaSynRM特殊的转子结构设计使得Ld,Lq变化尤为明显,本文所述的180 kW城轨PMaSynRM的Ld,Lq值随id,iq变化曲线如图3、图4所示。由图3、图 4 可以看出Ld,Lq随id和iq的变化有较大变化。本控制策略采用离线辨识Ld,Lq,建立Ld,Lq分别关于id,iq的二维表,电流查表步长为10 A,控制算法对电机运行时的每个工作点,用该表进行二维线性插值运算,获取Ld,Lq的实时值参与运算以提高MTPA控制精度。
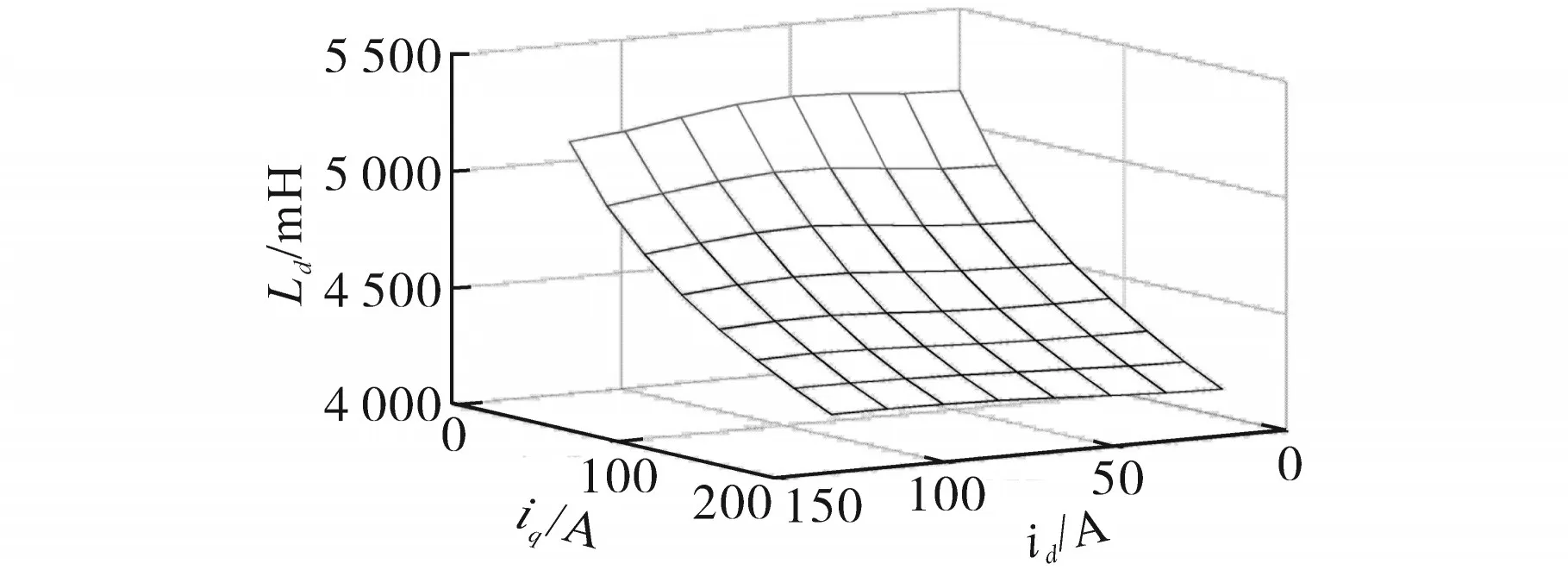
图3 Ld与id,iq的关系曲线Fig.3 Relation curve of Lqand id-iq
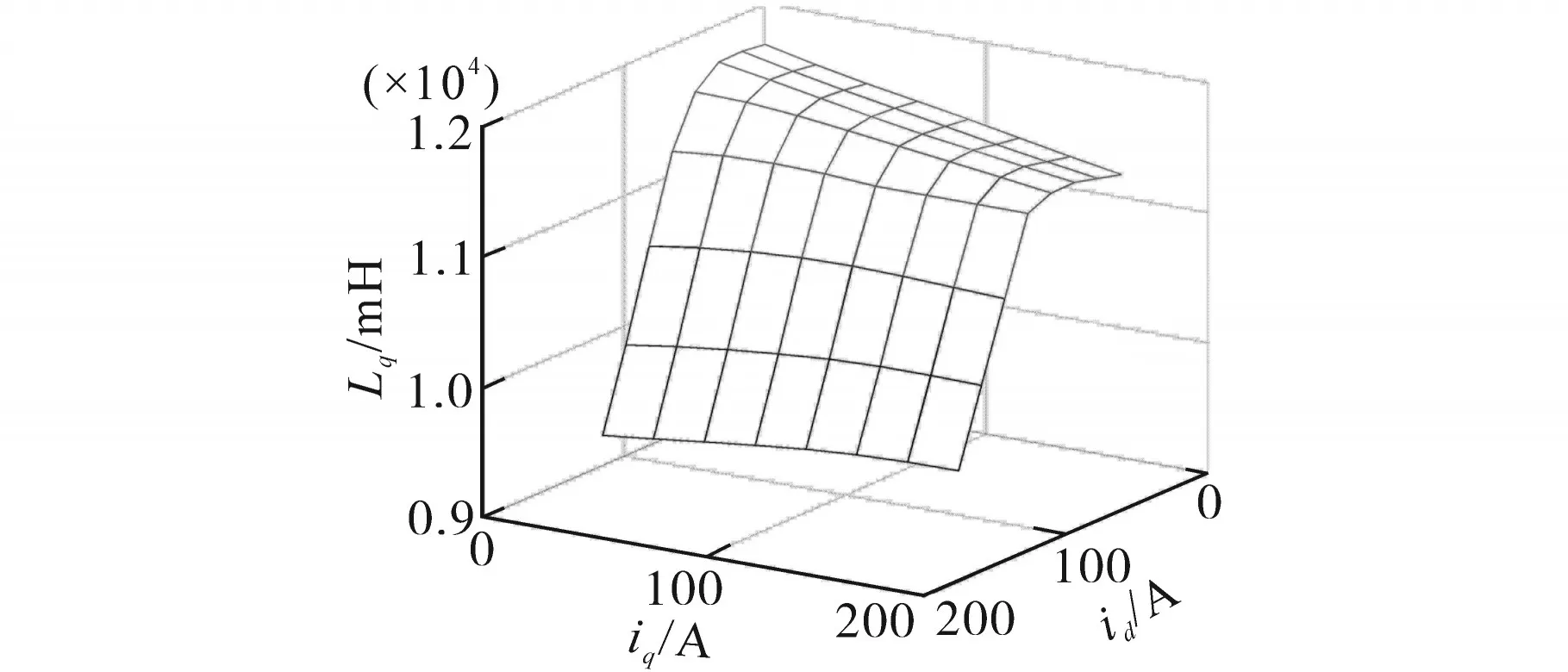
图 4 Lq与 id,iq的关系曲线Fig.4 Relation curve of Lqand id-iq
由转矩指令与电机参数直接计算MTPA控制下的id,iq十分复杂,本控制策略采用查表算法,将式(2)标幺化,得到下式:

式中:ten为转矩标幺值;idn,iqn分别为id,iq的标幺值,标幺值均与电机参数无关。
定子电流标幺值isn与idn,iqn关系如下式:

转矩和电流基值分别为下两式:
将式(7)代入式(8)求偏导可得最小电流极值分量idn,ten关系式如下:

将式(11)改写成下式:

用式(12)求得的解析解,构建一个关于ten与idn的一维表格,给定转矩除以teb得到;对于每一个用一维插值算法,算出一个,再根据下式计算:
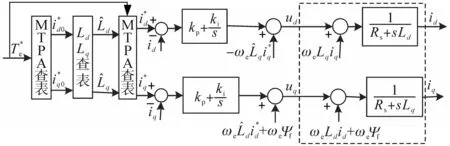
图5 MTPA控制框图Fig.5 MTPA control block diagram
为适应城轨列车启动和停车快且频繁的特点,需提升PMaSynRM矢量控制中动态响应能力,MTPA控制下电流环采用前馈解耦控制策略,在电流环输出环节加上的d,q轴耦合项计算得到ud,uq,耦合项分别与电机模型中d,q轴耦合项相抵消,消除d,q轴间耦合,使id,iq独立控制,反馈电流快速跟踪给定电流,系统快速实现稳定控制。
2.2 永磁辅助同步磁阻电机调制策略
受城轨电传动系统功率模块散热影响,IGBT最高开关频率仅为900 Hz,定子最高频率可达400 Hz,系统高速时载波比低,因此PMaSynRM调制算法采用多模式调制策略,包括异步调制、同步调制,特殊同步调制与方波,如图6所示。同步调制包括15分频与12分频调制,特殊同步调制采用中间60°调制策略,包括7分频和3分频调制。全速度范围内载波周期不断变化,控制算法与调制算法需独立设计,控制算法完成指令电压us生成,调制算法负责把us以脉冲的形式发出去。
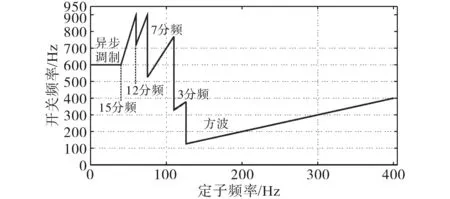
图6 多模式调制策略Fig.6 Multimode modulation strategy
中间60°调制策略,分别仅在三相电压调制波的正、负半周期各自中间的60°执行调制,而在其余相位区间没有开关动作,如图7所示的7分频与3分频调制方式,可在不提升IGBT开关频率的前提下,确保三相电压波形的对称性。
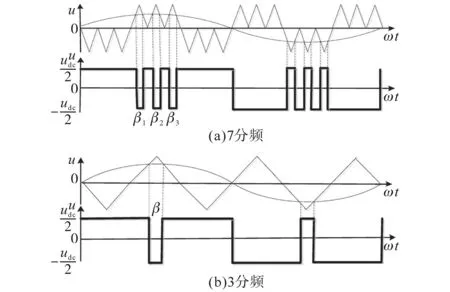
图7 中间60°调制Fig.7 Middle 60 degree modulation
假设β在正负半周内关于其π/2的位置轴对称,7分频还需假设正负半周内3个调制角度β1,β2,β3相等。3分频脉冲波半周期的傅里叶分解后电压基波幅值us1如下式所示:
计算得到β与us1的关系如下式所示:

由式(15)反解出β,如下式所示:

us在调制算法中可按式(16)计算β值,再转换为IGBT开通关断时间,相对于传统的消除指定次数谐波的调制算法SHEPWM,中间60°调制算法既运算简洁,又可确保基波电压准确,算法易工程化实现,且易逐步过渡进入方波控制,实现母线电压最大利用,同样的计算方法,7分频调制下的β计算式如下式所示:
每种调制方式可运行的最高频率受最高开关频率和调制度约束,异步调制采用注入零序分量的SPWM算法,当电机定子频率上升至40 Hz时,可切换到同步15分频调制,为使电压相位连续,以免电流冲击,不同调制方式切换需在一个载波结束时刻进行,且切换点相位需为切换前后载波对应的公倍数,如同步15分频与12分频可在一个周期内的0°,120°,240°3个时刻切换。
3 试验结果分析
使用本文所述的控制策略在额定功率180 kW城轨PMaSynRM电传动系统实验平台上验证,逆变器为某地铁列车用变流器,直流侧电压为DC 1 500 V,试验项点包括电机与逆变器系统联调试验、电机特性试验、电机温升试验等。
电机参数如下:额定功率180 kW,额定电压1 022 V,额定电流116.4 A,额定转矩859.4 N·m,额定效率95%,额定转速2 000 r/min,极数为8,启动转矩1 235 N·m,恒功功率246 kW,最大电流165 A。
3.1 电机与动态响应测试
200r/min下给电机依次加载200N·m,400N·m,600 N·m,800 N·m,1 000 N·m,1 235 N·m,然后依次减载,试验波形如图8所示,图8中至上而下依次为母线电压udc,UV线电压uuv,U相电流iu,可看出转矩给定变化后电流调节快速响应、无超调与冲击,系统运行平稳。
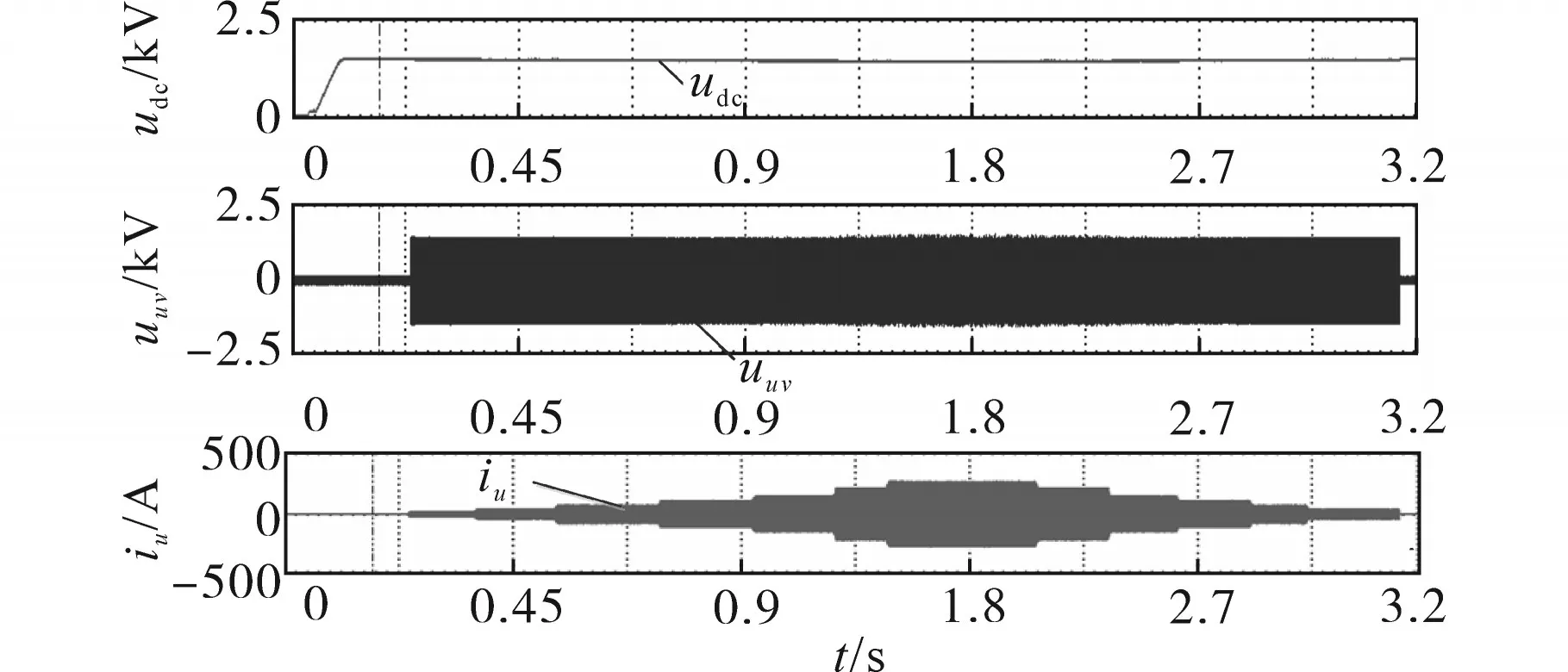
图8 加载试验波形Fig.8 Load test waveforms
3.2 电机扫频试验
在0~2 000 r/min进行满转矩扫频试验,试验过程中电压、电流波形整体平滑,无冲击震荡。升速过程中调制策略同步15分频切同步12分频、12分频切7分频、7分频切3分频、3分频切方波的试验波形如图9a~图9d所示,各图中从下至上依次为iu与uuv,各调制策略顺利完成切换,且切换平稳,无电流冲击;额定转速运行在方波工况,实现母线电压最大利用,且运行稳定,MTPA与弱磁控制实现平稳切换。
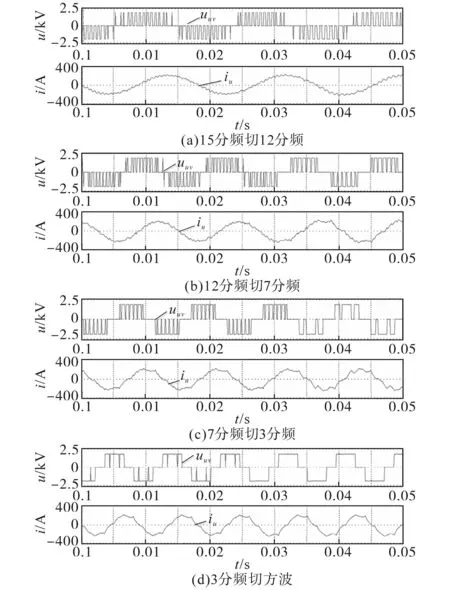
图9 调制策略切换Fig.9 Modulation strategy switching
3.3 电机特性试验
在电机设计特性点200 r/min,500 r/min,1 000 r/min,1 500 r/min,1 905 r/min,额定点2 000 r/min进行电机特性试验,试验数据如图10所示。

图10 特性试验精度曲线Fig.10 Accuracy curves of characteristic test
由图10可知,特性点转矩精度大于系统设计要求的95%,额定点效率为95%,满足系统设计要求,其余特性点效率均满足系统设计要求。
在额定点进行小时温升试验与过载小时温升试验,温升试验结束后电机温升分别为96 K与128 K,满足系统设计要求。
4 结论
本文对适用于城轨领域PMaSynRM的控制策略展开研究,结合城轨电传动系统特点设计了控制策略,并在180 kW城轨PMaSynRM电传动实验平台完成验证。
试验中控制系统动态响应好、转矩精度高、调制策略切换无电流抖动,进入方波工况后运行稳定、实现母线电压最大利用、MTPA与弱磁控制平稳切换,实验数据满足系统设计需求;经验证本文提出的控制策略在城轨永磁辅助同步磁阻电传动系统平台上可行。
