智能化多功能电动颈椎牵引装置的研制
2021-12-31赵东亮王健智陈皓宇赵移畛
赵东亮,王健智,陈皓宇,赵移畛
河南省正骨研究院 a.生物医学工程研究室;b.郑州院区管委会,河南 洛阳 471000
引言
牵引疗法以其简单、安全、无痛、有效得到广泛的应用,是颈椎病首选或主要的非手术治疗手段之一[1]。研究发现:牵引体位、牵引角度、牵引时间、牵引力量是决定颈椎牵引治疗效果的四个主要因素;仰卧位牵引的效果明显优于坐位牵引[2-3];根据颈椎牵引的治疗原理,如果最大的应力位置正好处在病变部位,将获得最佳治疗效果。而牵引时最大应力位置与牵引角度有关,牵引角度小时,最大应力位置在颈椎的上段;牵引角度增大时,最大应力位置将逐渐下移[4]。颈椎角度位移又分为屈曲、侧弯和旋转[5],对于颈椎生理曲度变直或反弓的病人需要屈曲一定角度牵引,而对于脊柱侧弯病人则需要侧弯一定角度牵引[6]。因此应根据颈椎病变部位和实际情况来选取最佳的牵引角度。
然而,目前市场上的电动颈椎牵引装置大部分为坐位牵引[7-9],可以对牵引力量和牵引时间进行自动精确控制,但牵引角度显示为刻度盘显示,不够直观,也不便于数据自动存储,而且只能对颈椎屈曲(上下)角度进行调节,不能对侧弯(左右)角度调节控制。
因此,为了提高颈椎牵引治疗效果和患者牵引治疗时的舒适性、安全性,研究开发一种可实现卧姿牵引,并可对水平和上下牵引角度、牵引时间、牵引力精确测控的多功能电动颈椎牵引装置显得尤为重要。
1 机械结构设计
多功能电动颈椎牵引装置主要由主控箱、次控箱、操控台组成。主控箱和次空箱通过一根光轴连在一起,主控箱底面固定有光滑的PP板,主控箱可在次空箱上表面绕光轴转动。次控箱底部四角分别安装有带刹车功能的万向脚轮,便于移动;操控台通过两根立柱和次控箱连接固定在一起,操控台上设置有触摸屏,其实物如图1所示。

图1 电动颈椎牵引装置实物图
2 控制系统设计
2.1 硬件设计
控制系统硬件框图如图2所示。拉压力传感器用来实时检测颈椎牵引时的牵引力当前值,测量到的信号为mV信号,经称重模块信号处理后转化为数字信号,传送给PLC,PLC根据牵引力设定值与当前值的偏差大小,自动控制伺服电机的转速和运转方向,达到自动恒力控制的目的。倾角传感器用于测量颈椎牵引时的上下(垂直)角度,输出信号为0~10 V标准信号,经过模拟量输入模块转换成数字信号,传送给PLC的CPU。旋转编码器用来检测颈椎牵引时的水平旋转角度,测量值为数字信号,可直接被PLC接收处理。通过PLC控制3根电动推杆的正反转实现调整头枕高度或上下牵引角度的目的。急停按钮用于紧急停机,当用户感觉不适时可按下急停按钮,系统自动复位到初始状态。人机界面用于参数输入和人机交互。根据硬件输入输出情况,PLC的CPU选用台达DVP12SA11T,称重模块型号为DVP201LC-SL,模拟量输入模块型号为DVP04AD-S[10-16]。

图2 控制系统硬件框图
2.2 软件设计
软件系统采用WPLSoft 2.49编程软件进行编程,控制流程如图3所示。系统先进行初始化,将各参数复位到初始状态。本装置的牵引角度是通过调整头枕的前后垂直角度和水平旋转角度来调节的,调整后变化幅度不大,故设计为开环控制,调整时切换至手动模式,通过手动点动按钮调整。颈椎牵引的拉力需要精确闭环控制,才能达到理想的治疗效果。牵引治疗时需切换至自动模式,系统根据拉力设定值的大小,自动控制伺服电机的正反转,将拉力当前值自动控制在设定值附近。此时牵引开始自动计时,计时结束伺服电机反转,自动释放牵引力。

图3 软件控制流程
2.3 人机界面设计
为了提高产品性价比,选用台达DOP-B03S210(4.3寸触摸屏)作为人机界面。主要包括监控界面、拉力设定界面、水平角度界面、上下角度设定界面。
2.3.1 监控界面
如图4所示为本设备的监控界面,可即时显示水平角度、上下角度、牵引力的当前测量值,并可设定治疗时间、显示剩余时间。设置有“手自动转换”键,切换为手动状态时,设备进入手动牵引模式;切换为自动状态时,设备进入自动牵引模式。切换为自动牵引模式时,在设备停止状态下,按下“启动/停止”键,键将凹陷,并显示为“启动”状态,设备开始自动牵引,在“启动”状态下,按下“启动/停止”键,键将突起,并显示为“停止”状态。此键只在“手自动转换”键切换为自动状态时才有效。监控面板上设置有5个界面切换键,分别为回首页、称标定、上下角度、水平角度和拉力设定。

图4 监控界面
2.3.2 上下角度设定界面
在设备停止状态下,触按监控界面左下角的上下角度切换键,进入上下角度设定界面,见图5。触按推杆1上升键或推杆1下降键,头枕前端将被升起或降下。触按推杆2上升键或推杆2下降键,头枕后端将被升起或降下。头枕固定板下端安装有一个倾角传感器,当推杆1和推杆2升降至同一水平面时,倾角传感器测量到的上下角度为0,两个推杆同时升降时可调节头枕高度,以适应不同高度的治疗床。当头枕后端高于前端时,倾角传感器测量到的上下角度为正,当头枕后端低于前端时,倾角传感器测量到的上下角度为负,从而实现电动调节上下牵引角度的目的。界面左上角黑色显示窗显示的为倾角传感器测量到的电压值经模拟量模块转换后的数字量,界面中间的黑色显示窗显示的为经程序算法换算后的上下角度测量值。
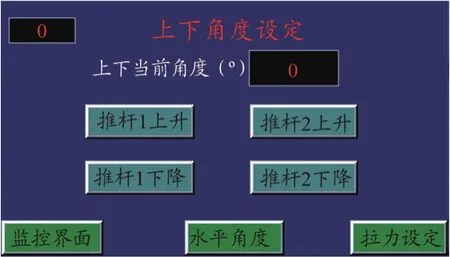
图5 上下角度设定界面
2.3.3 水平角度界面
触按“水平角度”切换键,进入水平角度界面,见图6。调节水平角度时,手动转动头枕箱体,转动轴上固定的旋转编码器将测量到的水平旋转角度传送给PLC的CPU,经数据处理后,在界面上的黑色显示窗显示出当前水平角度测量值。“定义当前为0度”键用于零点校准,调节头枕旋转角度,并用角度测量仪测量出实际水平角度为0时,按下“定义当前为0度”键,便起到零点校准的作用。

图6 上下角度设定界面
2.3.4 拉力设定界面
触按“拉力设定”切换键,进入拉力设定界面,见图7。触按设定牵引力量对应的黑色显示窗,便会弹出一个数字输入键盘,根据治疗需求,在键盘上输入相应数字,按下“Enter”键,该显示窗便自动显示出牵引力设定值。同理,可设定牵引快速频率和牵引慢速频率,当实际牵引力远小于牵引力设定值时,启动快速牵引,当牵引力临近牵引力设定值时,启动慢速牵引。同理,在该界面可设定治疗时间。“手动拉紧”和“手动松开”键只有当切换为手动模式时才有效。该功能主要用于手动调节牵引绳的伸出量。

图7 拉力设定界面
3 实验验证
3.1 实验方法
将研制好的电动颈椎牵引装置样机固定在一平板床床头,并将牵引装置头枕调节至合适高度,病人躺在平板床上,头部系好颈椎牵引带,头枕在电动颈椎牵引装置的头枕上。将GIM60型倾角水平尺固定在头枕表面;将GAM220型可折叠数字显示角度测量仪主臂与牵引装置次空箱固定在一起,折叠臂与主控箱固定在一起;将NK-200型数显式拉力计串联在牵引回路里。电动调节上下角度,分别记录人机界面上的水平角度当前值和倾角水平尺测量值;手动调节水平角度,分别记录人机界面上的垂直角度当前值和角度测量仪测量值;将牵引力分别设定为2 kgf和5 kgf,牵引时间均设定为20 min,记录牵引过程。
3.2 实验结果
水平角度误差≤1°;上下角度误差≤1°;牵引力为2 kgf和5 kgf时的牵引曲线如图8~9所示。

图8 LZFM-A型电动颈椎牵引装置加载2 kgf时的牵引曲线

图9 LZFM-A型电动颈椎牵引装置加载5 kgf力时的牵引曲线
4 讨论
采用气压工作原理制作的颈椎牵引装置[17]实现了便携式,但因受力面积大,牵引角度控制不够精准。河南华智生物科技有限公司发明的颈椎牵引装置[18]体积小巧,自动化程度高,实现了牵引力、牵引时间、屈曲牵引角度的精准控制,且为仰卧牵引,不足之处是不能够实现对侧弯牵引角度的调节控制。哈尔滨天愈康复医疗机器人有限公司发明的颈椎牵引康复机器人及其旋转平台机构[19]可实现颈椎屈曲牵引角度、侧弯牵引角度、牵引力、牵引时间的精准控制,但为坐位牵引,且体积庞大、价格昂贵,不便于普及推广。本文设计的智能化多功能电动颈椎牵引装置实现了水平(侧弯)牵引角度和上下(屈曲)牵引角度的精准测量控制;实现了牵引力的自动补偿和闭环测量控制,牵引力有波动,但很快能修正到设定值附近;实现了精准定时控制;且为仰卧牵引;提高了颈椎牵引设备的自动化程度和舒适安全性。根据电动颈腰椎牵引治疗设备行业标准[20]要求牵引力控制要有渐进期、牵引相和减退期,在牵引相期间要保持牵引力恒定,因此本设计的牵引力控制还需要进一步优化设计。