光纤通讯的绝缘臂高空作业车电控系统设计
2021-12-31蔡书峰
曹 丹,张 宇,蔡书峰
(徐州徐工随车起重机有限公司,江苏 徐州 221000)
1 引言
随着国家工业的发展和城市建设的推进,对供电可靠性的要求越来越高,推行不停电检修和施工势在必行。带电作业项目涵盖了配电线路的检修、维护、更新、改造等,作业范围从点到面,现已实现整条架空线路的检修和更换。绝缘臂高空作业车成为电力系统主要的带电作业工具,如图1。

图1 徐工GKJH21A绝缘臂高空作业车
为了实现工作斗与下部控制连接,满足有效绝缘长度和绝缘等级国标要求,目前我国市场上使用的绝缘臂高空作业车大多采用全液压控制。全液压控制系统采用绝缘胶管、绝缘油来传输液压操作信号,但是由于车辆动作多,需要很多根液压管路才能实现工作斗操作和下部操作的连接,每多一条管路就会多一条电流泄露通道,在管路老化和污染的情况下,整车泄露很容易超标,造成对作业人员的电击伤害。另外,全液压控制需要在工作平台设置笨重的手动操作液压开关阀,来实现对高空作业车工作臂的变幅或伸缩的操作功能,由于手动操作液压开关阀体积较大、质量重,容易造成绝缘斗的偏载,行车时造成绝缘斗的损坏。因此,一种新型的基于光纤通讯传输的控制技术越来越受到制造厂家的青睐。
2 电控系统总体架构
基于光纤通讯的绝缘臂高空作业车电控系统采用模块化设计,分为下车控制模块、转台控制模块以及工作斗控制模块,各模块均设置独立的控制器,用以实现不同位置不同功能的系统控制。下车和转台模块之间通过CAN 总线进行数据通信,转台和工作斗模块间通过光纤进行数据通讯。光纤通讯控制系统的控制框架如图2。在转台处设置一个光电转换器,将绝缘车下部控制器发出的CAN 信号转为光纤信号传至工作斗处,设置在工作斗的光电转换器再将光纤信号转换成CAN 信号,传输到工作斗控制器,从而实现上下车通讯的功能。

图2 整车控制系统框架图
3 模块化设计分析
3.1 下车控制模块
下车控制模块主要用于采集4 个垂直支腿压实状态以及4 个水平支腿的伸出幅度状态信号,实现支腿状态实时显示、一键展支腿、一键收支腿等功能,同时将支腿状态实时发送给转台控制器,转台控制器也将根据水平支腿的伸出幅度和垂直支腿的压实状态,实时调整臂架的允许工作幅度,限制臂架向危险方向动作。系统还可以根据设置在底盘大梁上的双轴倾角传感器所反馈的整车倾斜角度值,来实时控制4 个垂直支腿的伸出幅度,实现支腿的自动调平功能。每个垂直支腿均设置支腿着地检测开关,任何一个支腿被检测到着地时,如果还有其他支腿没被检测到,那么该支腿将停止伸出动作,等待其他支腿的检测信号。当系统检测到4 个支腿均着地后,开始启动系统调平功能。这样就可以实现在地基局部不平整时的调平。底盘自动调平到车辆前后或左右在0.5°以内就不再调节,认为车辆水平。车辆已经调平后再次按下调平按键,进行二次调平。
下车控制模块还可以采集底盘状态,远程控制底盘发动机,实现对底盘的远程点火、熄火控制、远程油门调速、发动机二次点火保护等功能。
3.2 转台控制模块
转台控制模块是整车的主控制单元,各种控制逻辑及运算均在这里进行。该模块根据下车控制模块传送来的支腿状态,计算出臂体运动的安全幅度区间,同时采集用于测量臂体空间姿态的传感器信号,如转台回转编码器、臂体变幅倾角传感器、臂体伸缩长度传感器等,计算出工作斗的实时三维坐标,当工作斗达到或超出安全工作范围时,系统会自动切断相应阀的输出,限制危险方向动作,并给出报警提示。好的控制系统会在动作停止前自动减慢运动速度,避免动作骤然停止引起的机械冲击,提高操作舒适度。
与常规高空作业车电控系统相比,该车设计的最大特点在于臂体部分通讯信号的光电转换及传输。采用CAN/光纤转换器和多模光纤进行实现。CAN 光纤转换器是实现CAN 总线数据和光信号相互转换的设备,转台控制器发出的CAN电信号经过CAN/光纤转换器后转换成光信号,并通过光纤进行传输,而设置在工作斗部分的转换器则将光纤传输过来的光信号再次转换成电信号,发送给工作斗控制器,实现转台与工作斗之间的通讯。
根据绝缘臂高空作业车的特殊结构特点及使用工况,CAN/光纤转换器一般选用带有光电隔离和中继延长距离功能的转换器,以避免雷击、浪涌以及电磁干扰对数据传输的影响,同时选用点对点式双芯光纤接头设计,实现数据独立的接收和发送,提高通讯效率。由于绝缘臂高空作业车光纤传输距离较近,且数据量较少,我们一般选用较为经济的多模光纤,但光纤一般布置在臂体内部或拖链里面,空间较为狭小,选型时需能满足小折弯半径的柔性光纤,如图3。
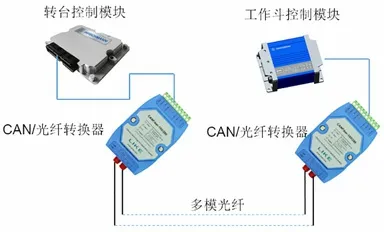
图3 CAN/光纤信号转换系统
3.3 工作斗控制模块
工作斗控制模块主要用于收集操作人员的操作指令,控制工作斗回转、升降及拐臂回转等动作的输出。该部分控制系统设计重点为操作界面设计及比例手柄选型。由于绝缘臂高空作业车操作人员工作时一般为带电作业,需要佩戴绝缘手套和防护手套,手指关节操作不灵便,所以比例手柄需要选用手柄头较大且较易按键的款式,操作面板也需考虑该特点。另外,作业时,操作人员需要将工作斗尽可能近地靠近带电设备或者架空电线,所以控制系统对臂架动作控制的精确性和平稳性要求非常高,动作停止时延迟时间要尽可能短,以免动作停止超时引起的设备碰撞事故。
4 结语
随着我国经济的不断发展,带电维修作业将是发展趋势,本文所述基于光纤通信的绝缘臂高空作业车控制系统,实现了工作斗连接臂架的管路从全液压控制的十几根简化至3 根,减轻了臂架的重量,提高了整车稳定性,同时实现了工作斗对整车的电比例手柄控制,使操作更简便、更精确。
