尖楔前体飞行器FADS 系统测压孔故障对算法精度的影响
2021-12-31王鹏金鑫
王 鹏 金 鑫
(中国航天空气动力技术研究院,北京 100074)
嵌入式大气数据传感 (flush air data sensing,FADS) 系统作为一种先进的飞行参数传感系统,经过不断发展及完善,目前国外技术已比较成熟,特别是针对用于钝头飞行器的FADS 系统,建立了相对完善的故障诊断及冗余配置方法,FADS 系统已成功产业化并已被广泛试验及应用于F-14,X-31,X-33,X-34,X-38 等[1-5]各型飞行器中。而针对尖楔前体用FADS 系统,关键技术尚未突破[6-8]。
鉴于尖楔前体飞行器外形各异,到目前为止尚未发展出一套成熟且通用的FADS 系统求解算法[9]。同时该类型飞行器目前大多正处于试验论证阶段,对于FADS 系统模型及算法的通用性实现困难极大。因此,对于FADS 系统的求解算法并不是非常成熟与完善。前期的相关研究表明,针对FADS 系统建立的神经网络算法已成功用于配备有昂贵装备的大型、快速飞行器中,且系统的精度较高[10-12]。但针对神经网络方法用于具有尖楔前缘飞行器用FADS 系统的分析研究工作较少,且采用的网络训练样本数据点数太少,无法充分反映神经网络算法在尖楔前体飞行器中应用的可靠性[13]。因此,本文建立了尖楔类FADS 系统的人工神经网络模型,并在此模型的基础上分析了其故障测压孔对于算法精度的影响。
FADS 系统通过配置在飞行器前缘表面的测压孔得到表面压力,根据建立的模型反推得到飞行器的飞行参数,测压孔配置及能否准确得到表面压力数值至关重要。人工神经网络算法依靠准确的压力输入得到准确的飞行参数,由于飞行器严酷的飞行环境及硬件配置需求等的影响,测压孔故障导致得到的表面压力不准确不可避免。此外,输入压力的噪声、传感器误差及电路系统故障都会导致FADS 系统性能降低。因此,在FADS 系统装配之前必须要对其噪声及故障的承受能力进行检验。此外,由于尖楔前缘飞行器前缘空间有限,很难从物理上过多配置测压孔以实现冗余的目的,所以,能否依靠仅有的几个测压孔实现互相作为冗余配置就显得很重要。
1 尖楔前体飞行器用FADS 系统简介
图1 所示为本研究尖楔前体飞行器的头部外形,其长度约为2400 mm,上表面的半楔角为15°,下表面为平板。飞行包线如图2 所示,分别给出了马赫数Ma、攻角及侧滑角与高度H的变化关系。本文研究的FADS 系统试验窗口如下:时间t=22~30 s,Ma=3.0~5.0,H=6.0~11.0 km。

图1 飞行器头部外形

图2 飞行包线
FADS 系统通过飞行器表面测压孔测量表面来流压力,根据建立的气动模型反推得到飞行参数,测压孔配置及压力准确性对FADS 系统的实现精度至关重要,尤其对于本文建立的无物理模型的BP(back propagation) 神经网络模型更加重要。该方法略去了气动建模的过程,但测压孔的选取需要基于气动理论,应配置在与相应飞行参数敏感的位置。针对尖楔外形特点及实际需求,根据相关的空气动力学理论,该FADS 系统配置了9 个测压孔。本文仅涉及位于攻角平面的5 个测压孔,用于马赫数、攻角及静压的建模及解算,对于位于侧滑角平面的测压孔及侧滑角的解算,本文并不涉及。FADS 系统的测压孔具体配置方案如图3 所示。

图3 测压孔配置
尖楔前缘驻点配置1 个测压孔p1(测压孔用p1表示,其压力数值用p1表示,下同),沿飞行器纵向对称面中心线上、下表面各配置2 个测压孔,其中测压孔p2,p4 位于上表面,测压孔p3,p5 位于下表面,用于估计攻角。各个测压孔的位置信息为,p1:(0,0,-0.002),p2:(18,0,9.611),p3:(18,0,-0.002),p4:(126.770,0,41.5912),p5:(126.770,0,0)(单位:mm)。本文仅从攻角解算的角度进行分析,所以仅涉及位于纵向对称面上的5 个测压孔。
2 数值计算结果分析
本文采用数值计算方法对测压孔压力分布特征进行了分析。基于第1 节的飞行包络,选取典型状态进行计算,得到的典型状态下的表面压力分布,通过提取位于前体表面不同位置的测压孔压力,得到所需测压孔的压力数值。为了定性分析流场结构及定量比较各个测压孔的压力分布规律,给出了Ma=3.0,攻角为0°时计算得到的头部外形流场结构如图4 所示,表面压力分布云图如图5 所示。
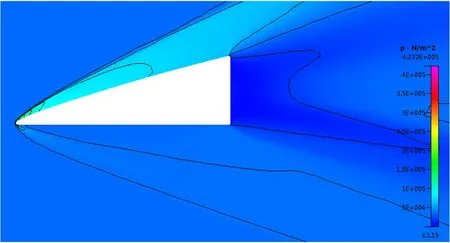
图4 压力分布云图
图6 给出了沿纵向对称面中线的上下表面及驻点区域的压力分布特征,定量说明了位于不同区域的测压孔的压力变化情况。所配置的测压孔应对求解的飞行参数敏感,才能有效地反映与之对应的飞行参数。针对测压孔的敏感性分析,参考文献[14]。

图6 沿纵向对称面中线的压力分布特征
3 尖楔前体飞行器FADS 系统的神经网络算法实现
3.1 人工神经网络模型
针对尖楔前体FADS 系统的特点及人工神经网络的非线性建模能力,本文采用基于BP 神经网络建模技术建立了FADS 系统的解算模型及算法,算法流程框图如图7 所示,主要流程包括模型构建、算法测试验证及脱机算法实现等。该算法结构包含输入层、(一个或多个) 隐含层和输出层,层与层之间依靠神经元互相传递信息,实现从输入到输出的高度非线性映射,但各层的神经元之间是独立的。该学习算法的基本原理采用多层前传算法,实现模式前向传播,误差反向传播。最终目标是通过训练数据集得到权值与阈值的系数矩阵,使得网络输出与期望输出间的均方误差值最小。同时,本文建立的网络结构隐含层采用双曲正切函数作为激活函数,输出层采用线性函数实现参量的输出。

图7 神经网络算法流程
3.2 基于双隐含层的多输入单输出神经网络模型
典型的含有双隐含层的多输入单输出神经网络模型如图8 所示,根据不同文献对输入层的定义,本文将输入层单独作为一层,并纳入神经网络总体结构中。输入参量P即为各个测压孔的压力数据,包含驻点压力数据时,输入数据为p1~p5;不包含压力数据时,输入数据为p2~p5。n为隐含层神经元数目,m为输入层单元个数(数据经归一化处理后的输入)。
第二,通过整合信息技术,使智慧校园的建设中拥有无线技术和网络基础的基础构建,并及时做好信息之间的联动运用,保证信息可以随时随地在介质中进行信息传播和信息联动,从而增加信息的覆盖率和信息精准度。

图8 多输入单输出神经网络结构
根据图8 的定义,输入数据首先要进行归一化处理,才能作为实际网络的输入参量,归一化流程参考文献[14]。隐含层神经元数目为n,输出变量为单一输出,即为攻角α。第一隐含层定义为

第二隐含层定义为

输出层定义为

其中,IW2,1,IW3,2,IW4,3分别为各层间的权值系数矩阵,b2,b3,b4为各层的阈值系数矩阵。f2,f3是该双隐含层网络结构中隐含层神经元的激活函数,定义为双曲正切函数。f4为输出层的功能函数,定义为斜率为1 截距为0 的线性函数。神经网络模型及算法详细流程参考文献[15],本文不再详述,仅对涉及的关键网络结构参数对求解精度的影响进行系统评估。
虽然从理论上神经网络作为一种代理模型的解算方法,可以训练任意的数据集(一一对应) 实现输入及输出的映射关系的建立。但是作为输入量的压力数据及输出量的飞行参数之间,本身具有一一对应的关系,从气动理论上是有实际物理意义的。所以,选取的测压孔应符合实际飞行需求。对于选取的测压孔敏感性分析,参考文献[14]。本文仅针对攻角的解算模型进行了分析,为了验证驻点压力对算法精度的影响,本文分别将驻点压力作为输入量与不作为输入量的情形建立了两套不同的网络模型。
3.3 数据集生成
神经网络建模本质上属于内插的方法,即需要大批量的数据作为训练样本,从而实现神经网络算法强大的预测能力,所基于的训练数据要包括FADS 系统工作域段的所有信息。本文建模的压力数据依靠CFD 生成,根据第1 节中该飞行器的飞行包络,在马赫数、静压及攻角范围内选择共计约2000 个数据点进行计算,其中Ma= 3.0,3.5,4.0,4.5,5.0;攻角为-10°,-8°,-5°,-3°,-2°,-1°,0°,1°;静压范围为20~50 kPa,获得足够多的样本数据易实现预测范围的全覆盖。其中1800 个数据点用于神经网络的训练,另外的约200 个数据点用于对训练好的网络进行测试。实际训练中,原始数据集分为训练集和测试集,从原始数据中抽取一部分作为测试数据,其余作为训练数据。训练集用于训练神经网络中的权值和阀值,监控计算过程中的训练误差;测试数据集用于测试最后得到的神经网络的泛化能力,得到泛化误差。
4 驻点压力对算法精度的影响
驻点作为反映流动信息的重要区域,与飞行状态信息密切相关,目前所有涉及FADS 系统解算的模型一般都将驻点压力作为输入参量。但实际工程应用中,驻点压力由于种种原因可能难以得到,如尖楔前缘半径很小,在前缘表面开测压孔结构上无法实现。因此,本节对驻点压力对模型及算法精度的影响进行了评估。神经网络模型及算法均采用上节介绍的基于BP 神经网络的多输入单输出算法结构。当建立的针对攻角的单输出网络结构输入量包括驻点压力时,输入量为p1~p5;当建立的针对攻角的单输出网络结构输入量不包括驻点压力时,输入量为p2~p5。对于图7 所建立的神经网络,得到了驻点压力对算法测试精度的影响如图9 所示,δα表示攻角解算值与实际数值的偏差。
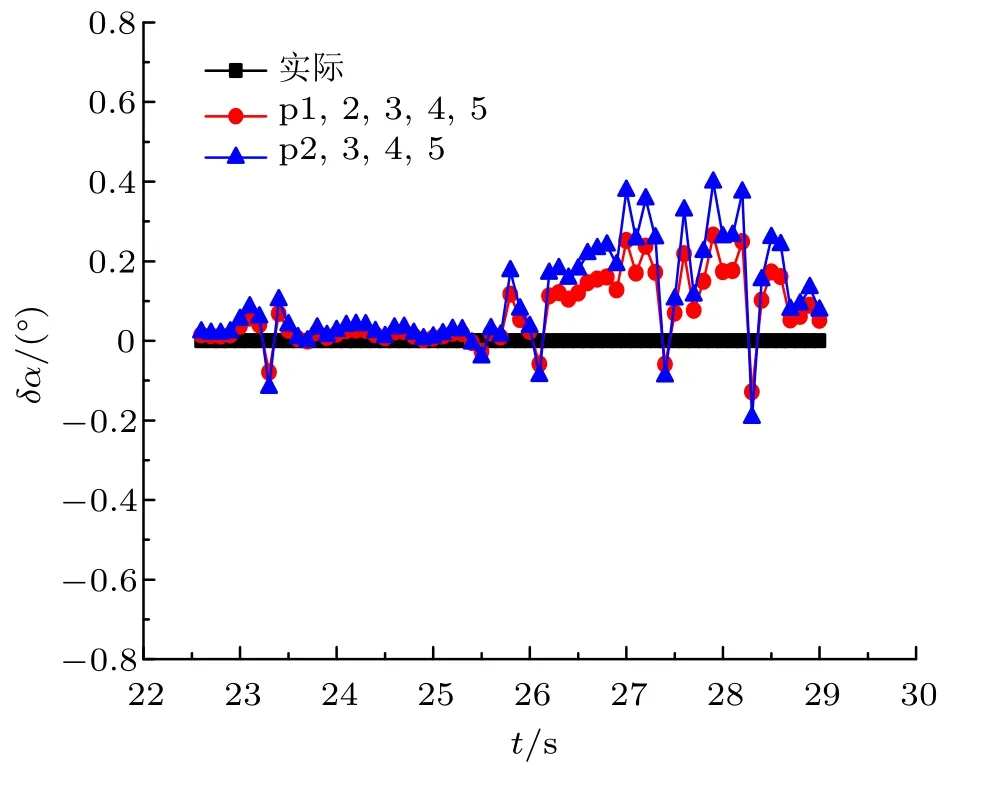
图9 驻点压力对算法精度的影响
根据图9 可以看出,驻点压力对于攻角的求解精度影响较大。驻点压力作为输入量的情形下,攻角的测试误差小于0.20°;而驻点压力不作为输入量的情形,攻角的测试误差小于0.40°,误差范围扩大。所以,驻点压力对于网络算法的攻角求解精度影响较大。在驻点压力可以准确得到的前提下,神经网络算法的输入量应包含驻点压力。
5 测压孔故障对算法精度的影响
5.1 故障设置方式
人工神经网络建模的优势是模型简单,劣势是随着网络结构的增加,所需机载存储增加显著,因此机载FADS 系统一般采用离线算法,并非实时训练。这就会导致如果某个测压孔发生故障而没有及时进行修正,所求解的飞行参数精度将受到影响。而利用相邻测压孔的压力读数替换故障测压孔的方法便是最简单的冗余配置方式,同时效果显著。这也是很多工程应用的FADS 系统都倾向于采用物理冗余配置的原因。
本设计中,测压孔p1 位于驻点区域,0°攻角附近时,实际上测压孔p2,p4 位于迎风面,测压孔p3,p5 位于背风面,同时位于迎风面或背风面的测压孔具有相似的压力分布特征,即p2,p4 具有相似的压力分布特征,p3,p5 具有相似的压力分布特征,仅在数值上存在差异,可以互相作为冗余使用。冗余配置测压孔的FADS 系统显著提高了对于故障的鲁棒性;而且能减小系统噪声的影响。基于测压孔p2和p4 及测压孔p3 和p5 的相对位置关系,并非越接近越好,因为要考虑模型的整体输入量的影响[14]。下述章节将对不同的故障测压孔是否进行修正进行系统比较,为了改进冗余配置以防发生故障对算法精度的影响。表1 给出了FADS 工作域段内各个测压孔的压力合理范围。

表1 各个测压孔的压力合理范围
5.2 单一测压孔故障
测压孔p1~p5 中单一测压孔故障,处理方法如下:(1) 若p1 故障,即驻点测压孔故障,将不对测压孔进行修正,将算法转入不含驻点压力训练得到的算法进行求解,因为驻点压力数值较大,无法依靠替换驻点压力修正,如第3 节所述。(2) p1~p5单一测压孔故障时,将故障测压孔的输入压力设置为0,不做修正的情形下对算法精度的影响如图10所示。(3) p2~p5 中单一测压孔故障,用相邻的位于同一迎风面或背风面的测压孔代替,即p2 故障,输入压力为p1,p4,p3,p4,p5;p3 故障,输入压力为p1,p2,p5,p4,p5;p4 故障,输入压力为p1,p2,p3,p2,p5;p5 故障,输入压力为p1,p2,p3,p4,p3,对算法精度的影响如图11所示。

图10 单一测压孔故障未修正对算法精度的影响
根据图10 及图11 分析,单一测压孔故障不做任何修正的情形下对算法精度影响极大,认为算法失效。驻点压力故障时,由于驻点压力较大,针对该尖楔形无法用简单的测压孔替换寻求解决方案,将转入第3 节所述的不包含驻点压力作为输入时的算法,此时的训练算法中不包含驻点压力,相对测压孔故障的修正得到的精度而言,精度较好。测压孔p2~p5 中的单一测压孔出现故障,用相邻的位于同一迎风面或背风面的测压孔代替时对解算精度的影响明显减小,虽然误差范围比各个测压孔正常工作时明显扩大,但在研究包线范围内,精度尚可。原因主要是对于尖楔前缘而言,同位于迎风面或是背风面的测压孔具有相似的压力分布规律,若位置配置合理,可以互相作为冗余配置使用。
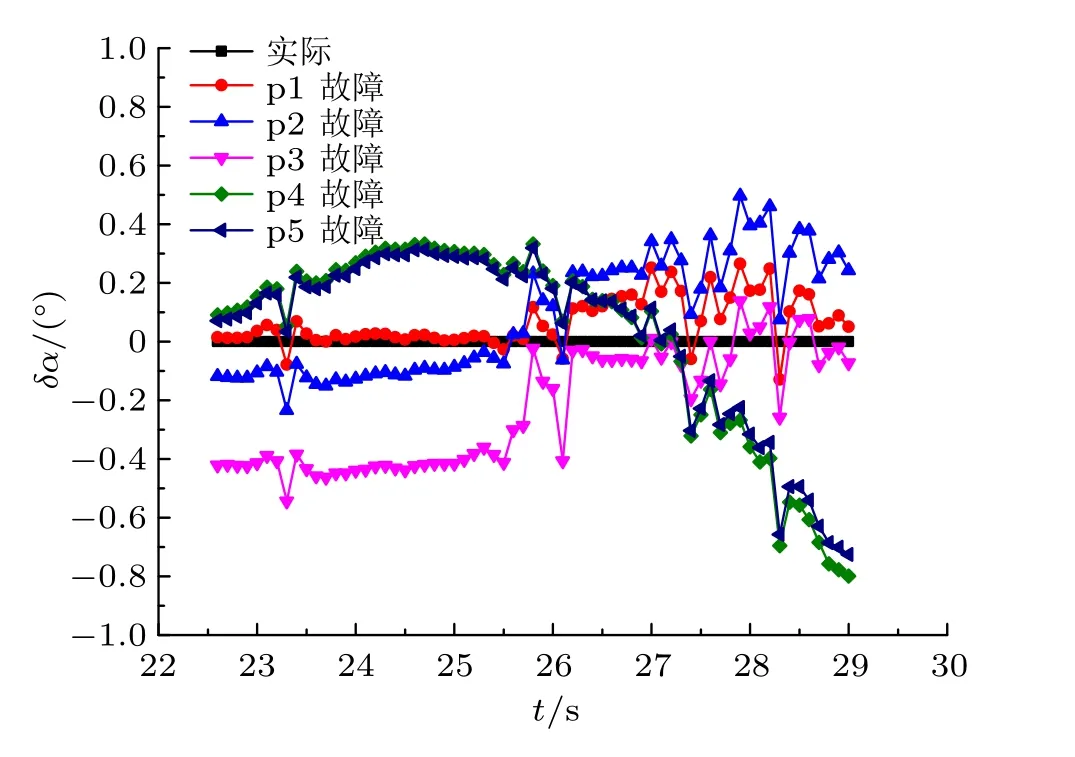
图11 单一测压孔故障修正对算法精度的影响
5.3 两个测压孔故障
测压孔p2~p5 中任意两个测压孔出现故障,处理方法如下:用相邻的位于同一迎风面或背风面的测压孔代替,即 p2,p3 故障,输入压力为p1,p4,p5,p4,p5;p2,p5 故障,输入压力为p1,p4,p3,p4,p3;p3,p4 故障,输入压力为p1,p2,p5,p2,p5;p4,p5 故障,输入压力为p1,p2,p3,p2,p3。基于5.1 节的分析,本节对于驻点测压孔故障及位于迎风面的2 个测压孔同时故障进行了定性分析,若位于迎风面的测压孔2 与4 同时失效,则认为FADS 系统失效。若两个测压孔出现故障而不修正,算法精度将急剧增大;若用临近的下一个位于同一迎风面或是背风面的测压孔代替,算法精度较好,如图12 所示。因此,对于2 个测压孔故障的情形,必需进行冗余修正。

图12 两个测压孔故障对算法精度的影响
故障诊断测试分析得出,若测压孔发生故障而不对其进行处理,不管是某一测压孔故障还是两个测压孔故障,神经网络的结构功能误差急剧增加,一个测压孔故障时攻角误差可达20°。相对而言,若将发生故障的测压孔的压力读数利用相邻的测压孔的压力读数来替换,那么误差会极大地降低,所以互相作为冗余的修正方法会极大改善FADS 系统针对故障的鲁棒性。
6 测压孔误差限分析
上述章节中针对测压孔故障的分析方法都将故障测压孔压力数据设置为零,即在某一测压孔故障时将其剔除在算法的输入中。实际测压孔故障有两种方式:(1) 传感器测压数值明显减小,甚至减为0,即为上述章节中的情形;(2)传感器压力数值一定程度地减小,超过了容许的误差限。譬如正常传感器偏差0.5% 左右,但实测传感器测压数值减小了5% 甚至更大。这种故障是测压不准导致误差偏大,若不超过算法容许的误差限,可以不进行修正。若超过算法容许误差限,要进行修正。因此,本节基于算法精度的容许误差限需求,对于各个测压孔的最大容许的误差限进行了分析,从而为算法的适用性提供指导。需要说明一点,各个测压孔的最大冗余误差限与所需飞行参数的精度水平密切相关。
沿所研究弹道生成对应各个测压孔的 3σ=100 Pa,300 Pa,1000 Pa 正态分布随机误差源分布,如图13 所示。为了考核单个测压孔的影响,将该按正态分布的随机误差源加入到p1~p5 的原始压力数据中,最后将加入误差源影响的压力作为算法的输入量,从而建立相应的误差容许限。结合实际预测精度的需求,得到误差源的极限范围。驻点p1 及p2~p5 加入上述生成的随机误差后对算法的精度影响如图14 和图15 所示。
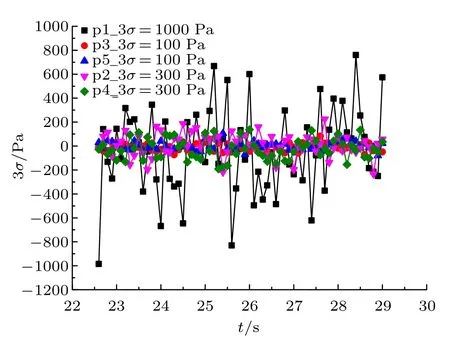
图13 各个测压孔给定的3σ 误差分布

图14 驻点p1 容许的误差限分析
将3σ= 1000 Pa,1500 Pa,2000 Pa 正态分布随机误差加入测压孔p1 原始压力数据中得到的攻角误差分布如图14 所示,可以看出单独驻点压力对算法精度的影响误差在0.2°~0.4°之间;将3σ= 100 Pa,300 Pa 正态分布随机误差加入测压孔p2~p5 的原始压力数据中得到的攻角误差分布如图15 所示,可以看出测压孔p2~p5 的单独压力偏差对算法精度的影响误差在0.1°~0.25°之间。在本文设定的误差限范围内,单一测压孔误差对于算法精度的影响并不显著,说明该算法适用性较好。同时综合p1~p5 各个测压孔的误差限分析如图16 所示。在p13σ= 1000 Pa,p2~p53σ= 100 Pa 的误差源下,可以看出压力对算法精度的影响误差在0.2°~0.6°之间,对算法精度有较大影响。所以,实际测压孔故障对算法精度的影响及各个测压孔容许的误差限需求,需要根据所需精度需求及硬件设备进行系统验证。

图15 p2 ~p4 容许的误差限分析
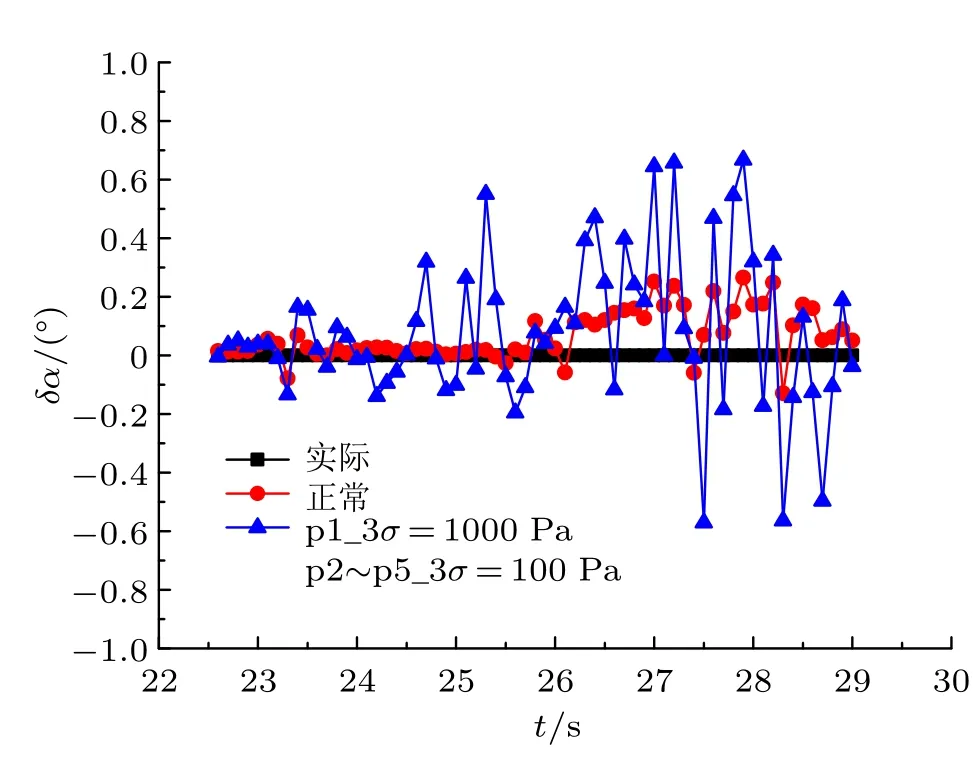
图16 综合各个测压孔的误差限分析
7 结论
通过人为设置测压孔故障的方法,针对单个故障测压孔及多个故障测压孔对尖楔前体飞行器FADS系统算法精度的影响进行了考核,并结合算法精度初步对各个测压孔的容许误差限进行了分析,得到的结论如下。
(1) 不管是单个测压孔故障或多个测压孔故障,若不进行修正,都将会显著降低FADS 系统的解算精度,可能使得FADS 系统失效。采用位于同一迎风面或背风面的相邻的测压孔压力替代故障测压孔,即通过互为冗余的测压孔配置,可以显著改善FADS系统的解算精度。
(2)驻点压力对建立的神经网络的算法解算精度有一定影响,但是相对某一测压孔故障时对算法精度的影响而言,采用不包括驻点压力建立的神经网络模型的解算精度较高。所以实际应用中应根据实际工程实践情形决定是否采用包不包括驻点压力的情形。
(3)针对各个测压孔误差限对算法精度的影响表明,各个测压孔在容许的精度范围内都有一定的误差冗余,需要根据所需精度的需求进行反推得到,从而建立各个测压孔的实际误差范围。
本文仅通过人为设置故障测压孔的方式对FADS 系统的性能进行了评估,且仅涉及FADS 系统中攻角的解算。对于其他飞行参数的分析及尖楔类FADS 系统的自动故障诊断方法将在后续文章中涉及。
