分布式一致性控制的虚拟同步发电机多机并联功率均分策略
2021-12-30曹山秀文传博
曹山秀,文传博
(上海电机学院电气学院,上海201306)
随着分布式能源渗透率不断提高,传统下垂控制的逆变器接口技术受外界扰动会严重影响电力系统的稳定性。虚拟同步发电机(Virtual Synchronous Generator,VSG)技术能够模拟同步发电机(Synchronous Generator,SG),使电子逆变器具有惯量和阻尼特性,其正逐步取代传统的下垂控制技术[1]。由于分布式能源的电子变流器控制方式和控制参数以及分布式电源的随机分布造成线路阻抗的差异,进一步导致并网点(Point of Common Coupling,PCC)处的电压不平衡。因此,研究并联VSG间的功率均分和环流抑制问题具有重要的意义[2-3]。
文献[4]从电压补偿的角度提出了一种改进的无功功率控制方法,在直流抑制方面起到了很好的作用,但该方法的底层控制参数选取较为复杂,且没有给出具体参数选取原则。文献[5-6]针对多逆变器间的等效输出阻抗和线路阻抗差异导致的并联功率难以均分的问题,引入负载电压负反馈及积分环节,实现功率的合理分配,但未详细介绍虚拟阻抗控制算法。文献[7]针对传统虚拟阻抗算法无法调节线路阻抗的问题,设计了一种可自动平衡不同线路间阻抗差异的自适应虚拟阻抗控制策略,但线路两端的实时阻抗值计算较复杂。文献[8]提出了一种改进的功率分配控制策略,在微电网结构发生改变或负载变化时仍能保持功率的精确均分,但采用的控制算法较为繁琐且难以实现。文献[10]在文献[9]的基础上提出了一种自适应虚拟阻抗控制策略,虚拟阻抗由一个自适应虚拟电阻和一个固定的虚拟电感组成,根据微电网的运行点自行设计自适应虚拟电阻,以缓解逆变器输出端的阻抗差异,但虚拟电感采用的是固定量,未考虑虚拟电感变化的影响。文献[11]提出了一种在逆变器输出电压中注入一个超小交流信号的自适应虚拟阻抗控制方法,该信号与有功频率下垂控制原理类似,但结构较复杂且难以实现。文献[12]提出了一种结合虚拟阻抗和虚拟电容的改进无功功率分配算法,但虚拟电容设计部分十分复杂。近年来随着多智能体概念的提出,文献[13]采用基于多智能体的一致性协调控制算法,实现了按比例分配分布式电源的功率,有效地抑制了分布式电源间的环流。
基于以上研究存在的问题,本文采用动态一致性控制算法,将无功失配项反馈给PI控制器,调节动态虚拟阻抗以实现无功功率按比例精确分配;设计了一种二次控制的电压频率控制器,恢复无功下垂动作及引入虚拟阻抗导致的电压频率跌落。
1 VSG基本原理及并联运行分析
1.1 VSG基本原理
VSG控制技术主要是模拟SG中的惯量及阻尼特性,其转子运动方程为
式中:Pref、Pe为VSG的机械功率和电磁功率;J、D为惯量和阻尼系数;ω、ωN为SG的机械角速度和额定角速度;θ为电角度。
式(1)中J、D的引入增加了VSG的自由度,VSG功频下垂控制中转子运动的机械功率为

式中:P0为VSG输出有功功率的实际值;kp为有功频率下垂系数。
VSG的无功电压下垂控制方程如下:

式中:Umag、UN为励磁电压和额定电压;kq为无功电压下垂系数;Qref、Q为无功功率给定值与实际值。
1.2 并联VSG运行功率分配
由于逆变器在多机并联运行时容量及输电线路阻抗的不同,导致并联逆变器间功率不能合理均分。两台不同线路阻抗的VSG,如图1所示。图中,Pi、Qi(i=1,2)分别为VSG1、VSG2端输出的有功、无功功率;U1、U2分别为线路1、线路2端电压值;ΔU1、ΔU2为线路1、线路2电压降落的纵分量;ΔR、ΔX为线路1、线路2之间的电阻和电抗差;σU为线路经ΔR、ΔX后的电压降落值;Pcci、Qcci(i=1,2)分别为线路1、线路2末端有功、无功功率。
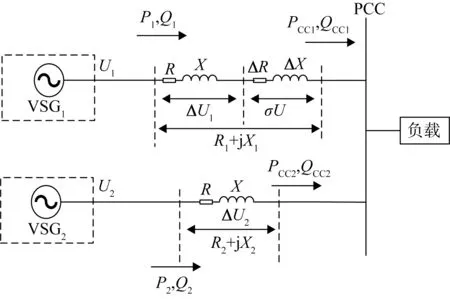
图1 VSG双机并联阻抗支路图
由图1可知,以VSG2的线路阻抗为参考阻抗时,σU是由线路阻抗不匹配所引起的线路电压降,这将导致不同VSG之间的无功功率不能均分。
2 动态一致性控制下的自适应虚拟阻抗
2.1 虚拟阻抗变化对VSG等效输出阻抗的影响
为减少由线路阻抗差异造成的VSG并联功率均分问题,通过引入虚拟阻抗控制策略调整逆变器等效输出阻抗[14]。其控制结构图如图2所示。图中,Z(vs)为引入的动态虚拟复阻抗;Uref分别为引入虚拟阻抗前和引入后的电压环指令值;iref为输出参考电流;kup、kui为电压环比例参数和积分常数;kip、kpwm为电流环比例系数和变流器增益;io、uo分别为逆变器输出的电流和电压。根据图2及表1中的数据绘制引入虚拟阻抗前后的等效输出阻抗伯德图,如图3、图4所示。
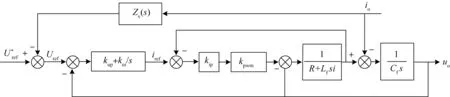
图2 引入虚拟复阻抗的电压电流控制结构图
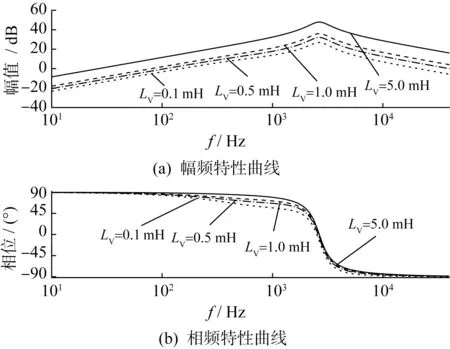
图4 引入虚拟阻抗时k ui变化等效输出阻抗伯德图

表1 基本参数
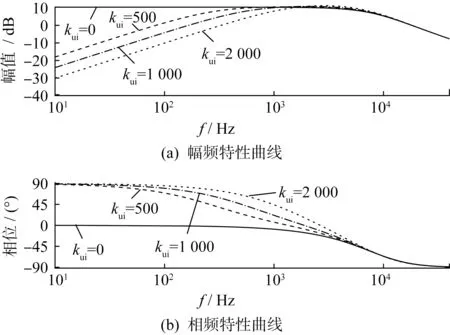
图3 未引入虚拟阻抗时k ui变化等效输出阻抗伯德图
当电压环比例系数为0时,低频段处等效输出阻抗呈阻性,在频率为50 Hz处呈复阻抗特性;当比例系数为1 000时,在基频处呈感性。
在引入虚拟电感Lv之后,等效输出阻抗在低频段和基频处呈感性。通过引入虚拟阻抗控制策略调整逆变器等效输出阻抗,从而达到提高功率均分精度和环流抑制的效果。
2.2 自适应虚拟阻抗设计
多智能体系统可以应对各种复杂的环境,合理地解决资源分配问题,平衡个体之间的差异。因此,本文采用多智能体一致性算法,调节并联运行系统中VSG动态虚拟阻抗值,实现无功功率按比例精确分配[15]。
分析不同线路阻抗的并联VSG系统可知,为了按VSG额定功率比例分配负载无功功率,下垂系数应设计成与其额定功率成反比,即

式中:ni为对应的无功下垂系数;Qi(i=1,2…n)为相应VSG输出的无功功率。
无功功率分配的分布式协同控制是一阶线性多智能体系统的调节器同步控制问题。为了实现精确的无功功率成比例分配,一致性控制应设计为niQi相等,则有

根据一致性控制算法,无功功率失配的辅助控制器uQi根据每个VSG的自身信息与相邻VSG的信息进行选择。即每个VSG处的无功功率控制器将本地无功功率共享信息与相邻无功功率共享信息的加权平均值进行比较,以发现无功功率失配。辅助控制器为

式中:CQ为耦合增益;e为VSG自身与相邻VSG无功功率的失配;aij为邻接矩阵中反映各VSG连通条件变换的元素。
将无功功率失配值馈送到PI控制器Ai(s)以产生虚拟阻抗校正项δQi,即

在功率分配不均时,将功率失配反馈到PI控制器中产生虚拟阻抗的矫正项,调节无功功率按比例精确分配,即

式中:LVi为以无功失配为输入,由比例积分控制器调节的动态虚拟电感值;L*Vi为稳态时的虚拟电感值,以保证VSG等效输出阻抗为感性;kL为调节虚拟电感的比例增益。
当VSG的无功功率比期望的无功功率值小时,相应的控制器就会响应,并通过虚拟阻抗动态调节,增加虚拟阻抗矫正项的值,使自适应虚拟阻抗减小。较小的虚拟阻抗增加了VSG单元负载无功功率的共享,因此可以通过调节动态虚拟阻抗,将无功功率分配误差减小至为零。
3 基于二次控制的电压、频率恢复
3.1 电压恢复
加入动态虚拟阻抗后,系统输出阻抗的感抗部分得到增强,解决了VSG无功电压下垂控制不精确的问题。但加入虚拟阻抗后导致电压压降的增大,严重影响微电网的电能质量和系统的稳定性。本文采用二阶一致性算法,对微电网系统进行二次调频调压控制,解决电压和频率的偏移问题。
并联VSG系统中,一级控制采用有功频率、无功电压下垂控制,即

式中:Udi为第i台VSG输出电压在d轴上的分量,q轴分量参考值为0;Uni为第i台VSG额定输出电压,由二次控制器给定。
对式(10)两边进行微分,有


式中:cu为控制增益;eui为局部相邻跟踪误差,以分布式一致性算法展开为
改进后的无功电压下垂控制为

式中:ndi为第i台VSG的无功变化补偿系数;kui为积分增益。
3.2 频率恢复
与二次电压控制器类似,对有功频率公式两边进行微分可得

式中:uωi为定义的辅助频率控制器;ωi为下垂控制生成的系统输出频率;mi、pi分别为对应的VSG有功下垂系数和有功功率值;ωni为第i台VSG额定输出转子频率。
根据式(15)可计算出控制输入为ωni时的动态系统频率为
式中:cω为频率失配的耦合增益;eωi为相邻VSG之间的频率跟踪误差;ki为第i个节点到参考节点的权重系数。
引入二次频率控制器后的有功频率控制方程如下:

式中:mdi为第i台VSG的无功变化补偿系数;kωi为电压积分增益改善系统动态响应。
为改善系统动态响应,引入功率计算环的低通滤波器通常会引起一定程度的滞后作用,因此在功率环节中增加功率的微分环节,加快系统的动态响应。
4 仿真及分析
4.1 等容量的VSG并联仿真
建立两台等容量的VSG并联模型。有功频率、无功电压下垂系数分别为kp=10-4、kq=10-3。转动惯量J=200,阻尼系数D=10。开始时带3 kW、1 kvar的公共负载,两台VSG组的馈线分别为1 km、13 km(1 km的馈线系数R=0.54Ω,XL=0.082Ω)。在1 s时并联运行,在2 s处接入3 kW的有功负载和1 kvar的无功负载。图5、图6分别为传统控制策略和本文所提出的引入动态虚拟阻抗策略并联运行时的功率仿真结果。
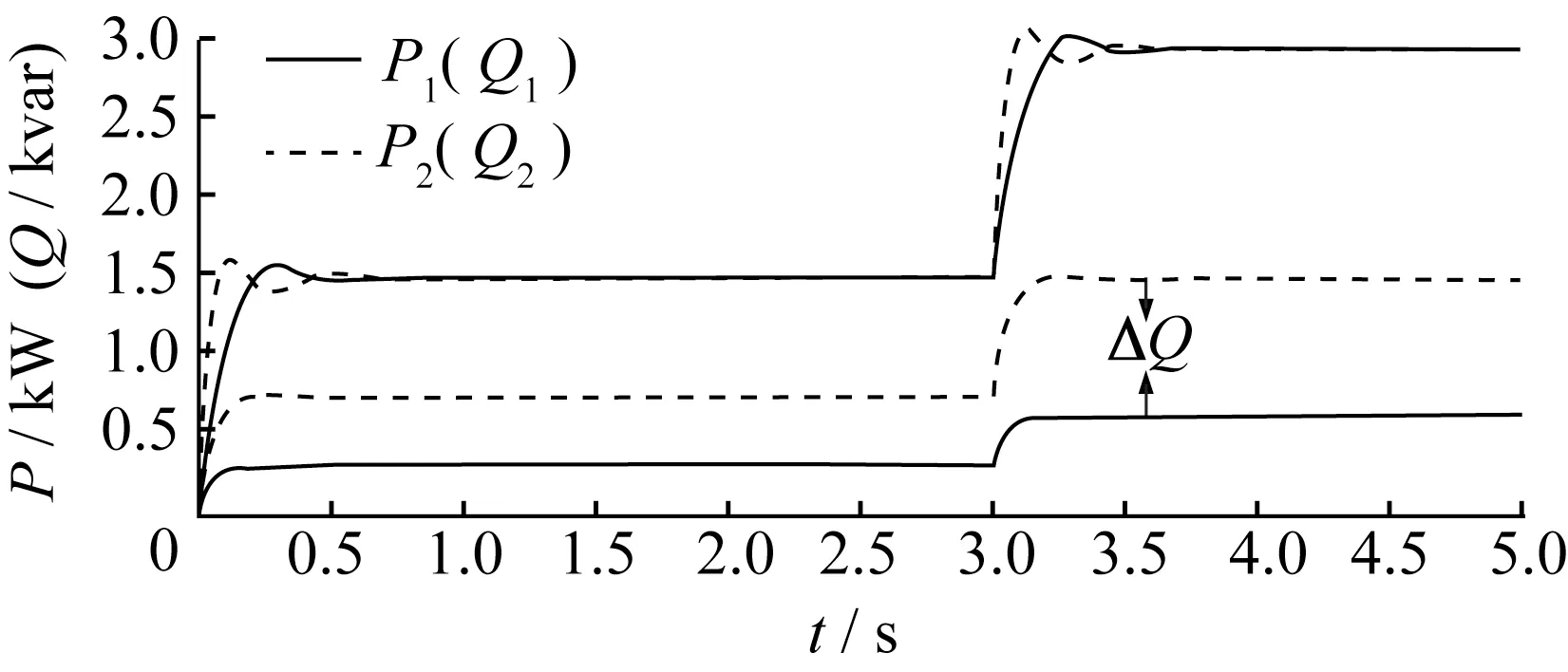
图5 传统VSG控制功率分配图
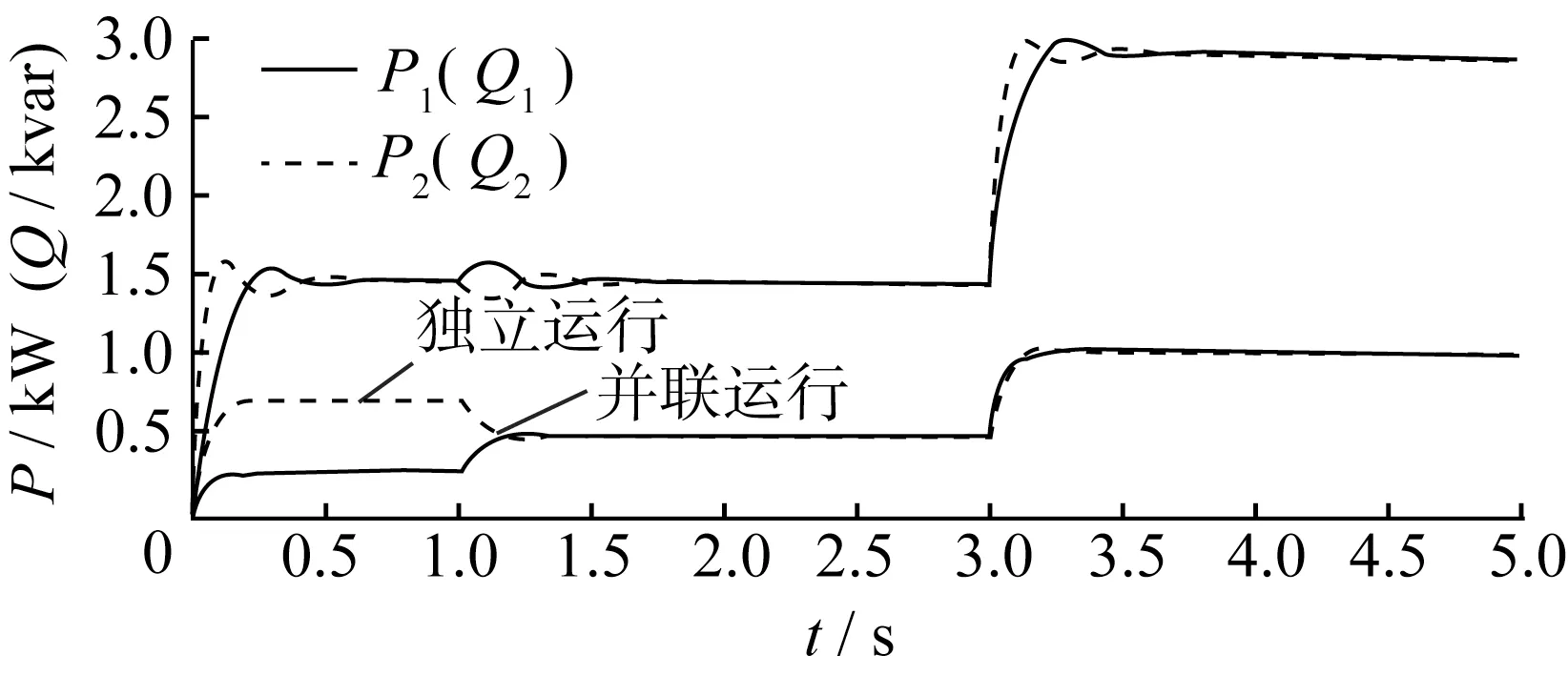
图6 引入动态虚拟阻抗的功率分配图
图5 、图6中有功功率存在积分环节,因此改进前后有功功率均能够精确地均分;而图5中无功环节不存在积分环节,使得两台VSG并联间的无功功率不能够合理地均分。两台VSG之间的无功差值为ΔQ,对比改进后的仿真图可知,经改进控制策略后,两台VSG之间的无功差值为0,无功功率得到了良好的均分。
4.2 不同容量的VSG并联仿真
为了进一步验证本文所提出的动态虚拟阻抗和电压、频率恢复策略下的功率分配和环流抑制的有效性,对容量比为1∶2∶3的3台VSG搭建仿真模型,从功率的分配、环流抑制、电压频率恢复等方面进行说明,仿真时间为4 s。0~2 s时3台VSG带12 kW/9 kvar的公共负载运行,在2 s时,突增6 kW/3 kvar的功率负载运行。仿真参数见表2。
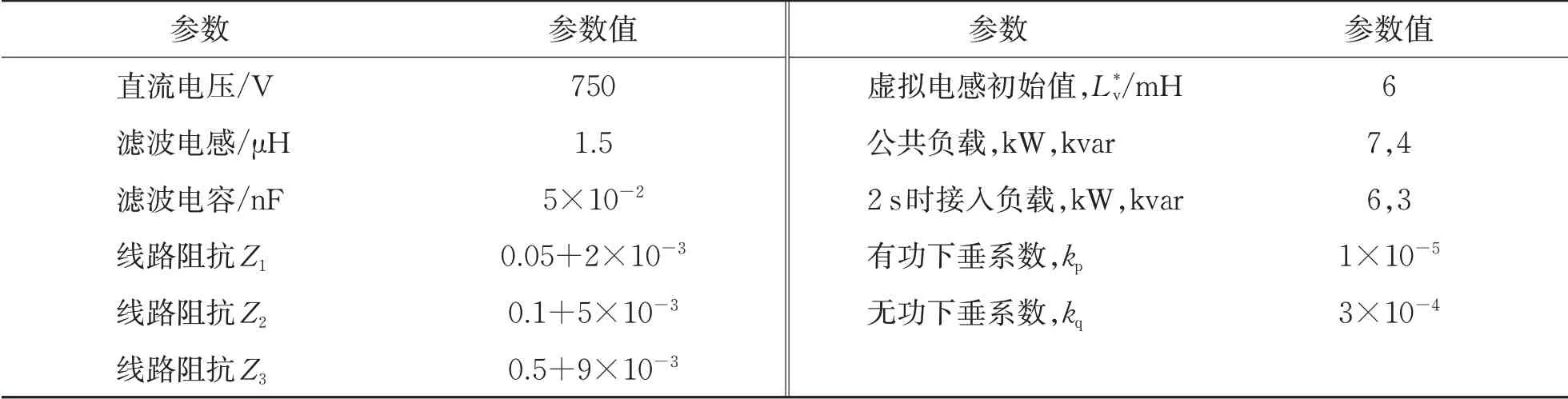
表2 3台VSG的仿真模型参数
4.2.1 功率与环流 图7、图8分别为固定虚拟阻抗控制和动态虚拟阻抗控制下的功率分配仿真图。VSG有功频率环存在积分环节,因此两种控制方式下的有功功率均能够按比例分配,而传统VSG的无功电压环中由于没有积分环节的作用导致无功不能均分。由图7可知,3台VSG的无功功率分别为0.58 kvar、1.78 kvar、4.52 kvar,额定容量1∶2∶3进行精确分配。而图8中采用动态虚拟阻抗控制策略后,3台VSG的无功功率分别为0.85 kvar、1.70 kvar、2.55 kvar,能够按照3台VSG额定容量1∶2∶3进行精确分配。改变前后的VSG并联之间的环流大小如图9、图10所示。
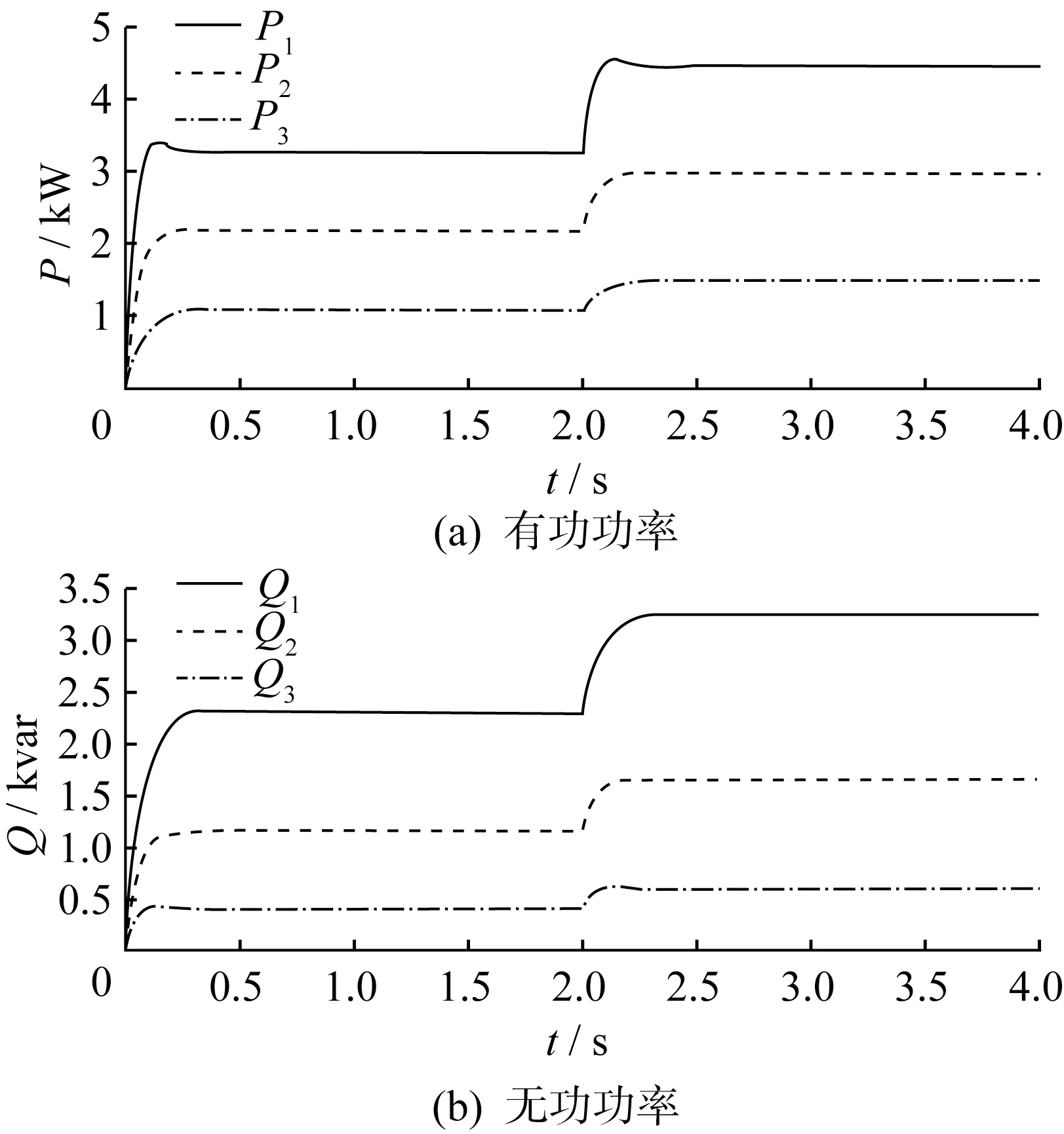
图7 固定虚拟阻抗下的功率分配
图8 引入动态虚拟阻抗后的功率分配
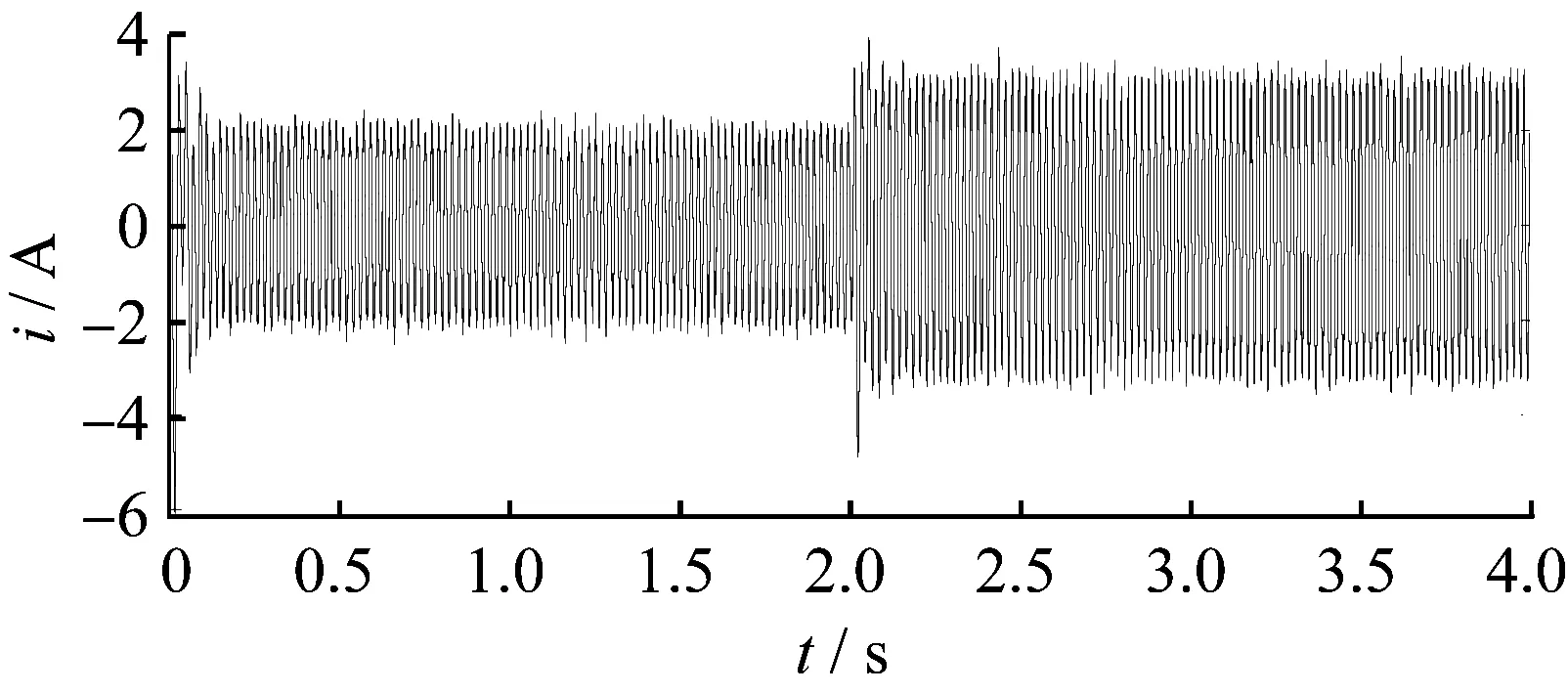
图9 传统VSG控制并联环流

图10 改进后的并联环流
4.2.2 频率与电压 为了验证本文改进动态虚拟阻抗和电压补偿控制策略对系统频率与电压稳定的有效性,在2 s时接入负荷。图11~图14分别为改进前后的频率、电压变化图。

图11 传统VSG控制下的频率变化
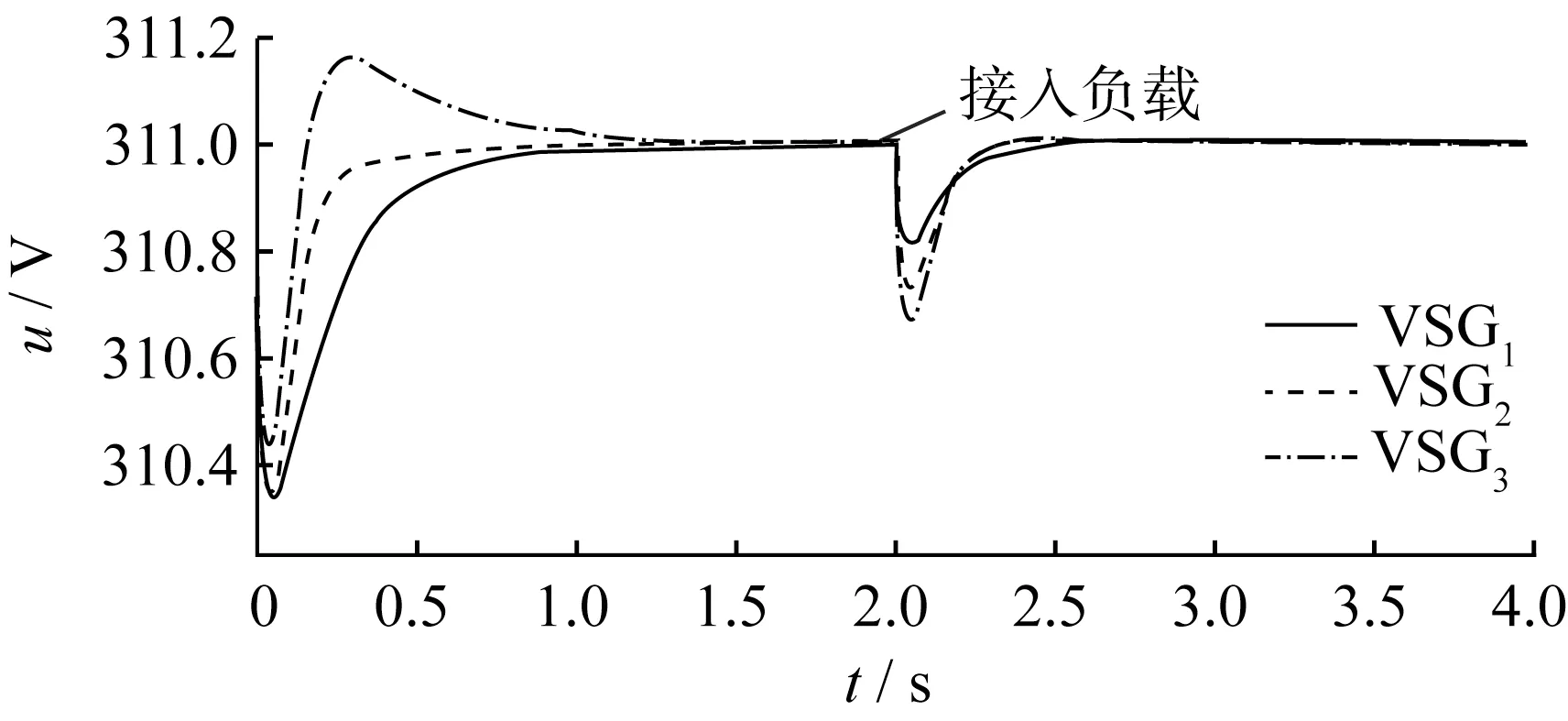
图14 改进策略后的电压恢复图
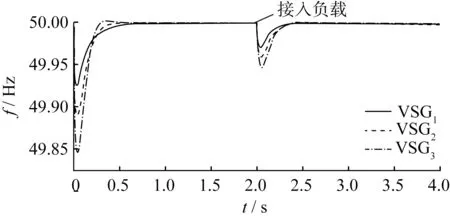
图12 改进后的频率变化
由图11、图13可知,传统控制策略在系统接入负荷时会造成频率和电压的跌落,使得系统频率偏离额定值0.3~0.5 Hz,电压偏移额定值2~3 V。而采用本文所提出的控制策略后,负荷变化系统的频率能够维持在额定频率50 Hz附近,电压维持在额定电压311 V附近。
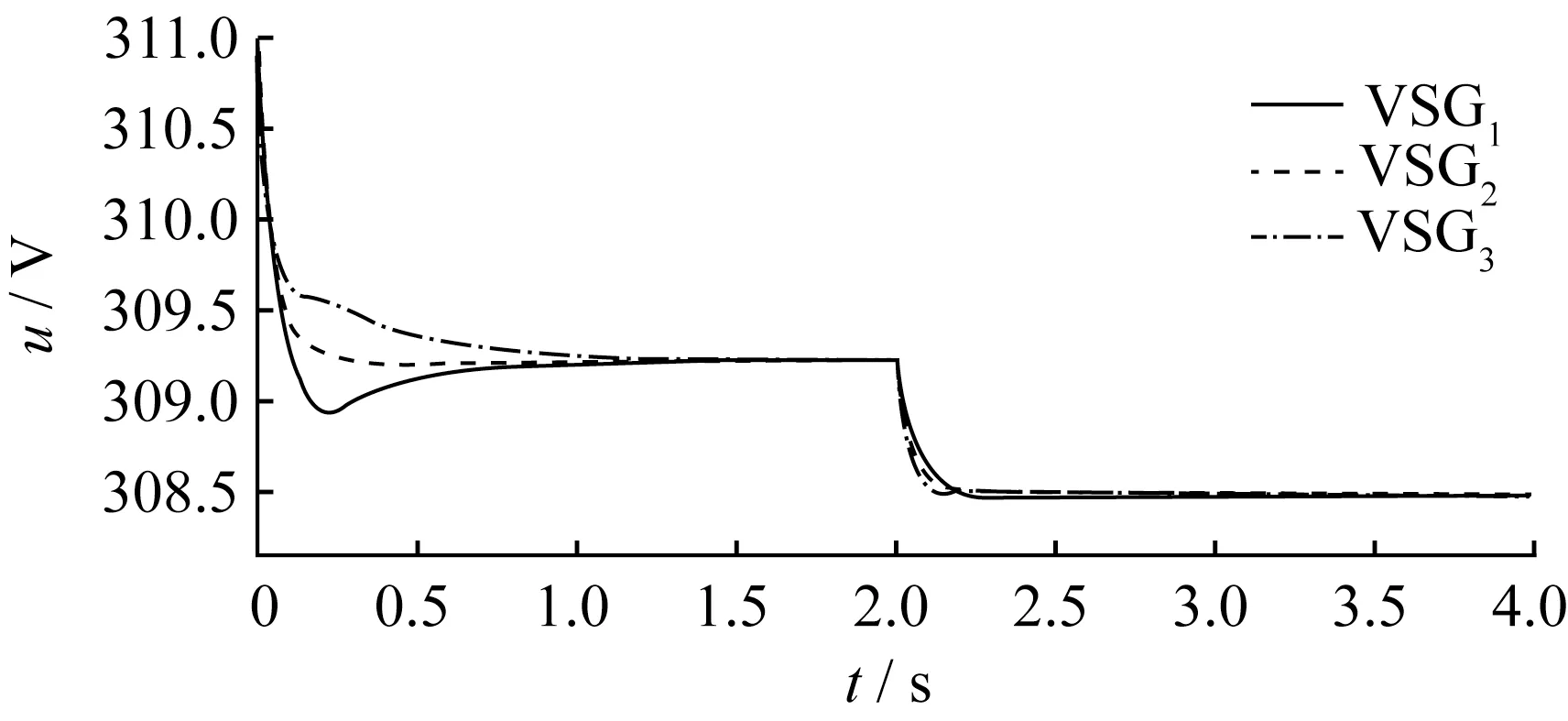
图13 传统VSG控制下的电压变化图
5 结 论
本文介绍了低压微电网中VSG并联的功率分配机制,针对传统分布式电源并联线路阻抗不匹配导致无功功率不能均分及环流的问题,提出了基于分布式一致性控制算法,调节虚拟阻抗以实现无功功率的精确匹配。同时针对传统的VSG无功下垂及虚拟阻抗的引入导致系统电压和频率跌落的问题,设计了基于分布式协同控制的电压和频率调节器,对电压和频率进行二次调节,使系统在切/接负载时,电压和频率能够快速恢复并稳定在额定值范围内,提高了系统输出电压的质量,具有较强的鲁棒性。
