35D锁塞拉门虚拟样机建模方法研究
2021-12-29曾世文王祖进孙畅励
曾世文,王祖进,孙畅励
(南京康尼股份有限公司,江苏 南京 210038)
0 引言
锁闭装置是城轨车门的主要零部件之一,对车辆的稳定安全运行有着重要影响。锁闭装置的故障会直接导致列车延误,甚至会造成人员伤亡,带来难以想象的损失。35D锁是城轨车门常见的锁闭装置之一,对35D锁进行研究对提高车门系统稳定性、保障车辆运行安全有着重要作用[1-2]。
35D锁传统的研究方式多数基于运行使用情况对其常见的故障形式及原因进行统计,通过理论分析优化锁闭结构及控制策略。这种方法往往耗时较长,且难以找到故障的根本原因,借助虚拟样机技术有助于加深对35D锁闭装置结构的认识[3],为后续35D锁常见故障研究提供参考。
1 35D 锁闭机构原理
35D锁是一种利用摩擦制动原理实现锁闭功能的锁闭装置,集传动和锁闭功能于一体,具有结构简单,环境适应性强等优势。如图1所示为35D锁闭机构模型。扭簧过盈套在丝杆轴和固定轴上,丝杆轴顺时针转动时,扭簧松圈,转动超越。丝杆轴逆时针转动时,扭簧抱紧,转动禁止,丝杆轴制动。

图1 35D 锁闭机构Fig.1 35D locking mechanism
2 35D 锁闭机构建模
2.1 三维装配模型
基于SolidWorks对35D锁闭机构进行三维模型装配,并将装配模型另存为.x_t格式导入RecurDyn多体动力学仿真软件[4-5],如图2所示。

图2 35D 锁闭机构三维装配模型Fig.2 3D assembly model of 35D locking mechanism
2.2 建立动力学仿真模型
2.2.1 扭簧柔性化处理
扭簧是35D锁的主要作用部件,因此对扭簧进行柔性化处理[6],如图 3所示,并对扭簧的材料密度、泊松比、弹性模量等属性进行设置。

图3 扭簧柔性化Fig.3 Flexibility of torsion spring
2.2.2 材料属性设置
根据35D锁闭机构中各零部件的材料属性,设置仿真模型中各刚性零部件的密度。为加快仿真模型的计算速度,利用 RecurDyn中的 merge功能,将固定连接在一起的零部件合并,对merge后零部件的质量、转动惯量、质心位置等参数进行设置。
2.2.3 运动副设置
根据35D锁闭机构的运动原理,对仿真模型中各零部件间的约束副进行设置,包括:固定副、旋转副、接触等。
2.2.4 添加载荷与驱动
对仿真模型中的载荷进行设置。在电机连接轴输出端添加扭矩,大小为 40N.m,在电机连接轴输入端添加驱动,驱动曲线如图4所示。在拨环上添加驱动,驱动表达式为:


图4 驱动曲线Fig.4 Driving curve
2.2.5 接触参数设置
对仿真模型中的接触参数进行设置,如表 1所示,其中K为接触刚度、C为接触阻尼、ud为动摩擦系数、us为静摩擦系数、d为最大穿透深度、e为刚度指数。

表1 接触副参数Tab.1 Contac t pair parameters
2.3 仿真分析
运行分析,使用扭矩进行驱动,扭矩大小从5N.m逐步增大至40N.m,得到拨盘的位移曲线,如图5所示。调整接触副参数,使得驱动扭矩为40N.m时,拨盘保持不动,修正后的接触副参数如表2所示。
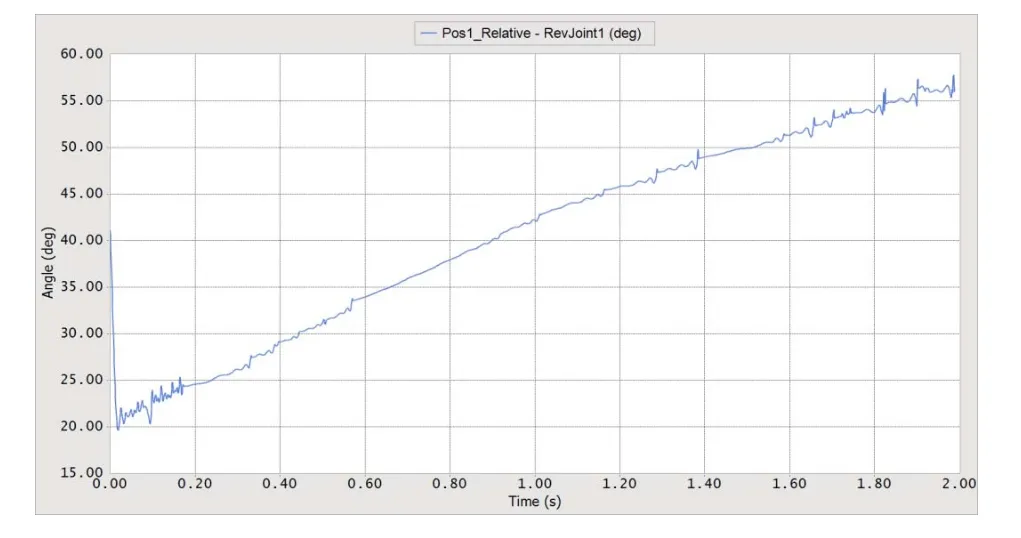
图5 拨盘位移曲线Fig.5 Dial displacement curve

表2 修正后的接触副参数Tab.2 Modified contact pair parameters
对35D锁闭机构的仿真模型进行分析,得到运动曲线驱动下,矩形扭簧的最大应力曲线,如图6所示。

图6 矩形扭簧最大应力曲线Fig.6 Maximum stress curve of rectangular torsion spring
3 门系统动力学建模
3.1 城轨塞拉门(35D锁)动力学模型搭建
将 35D锁作为子系统导入城轨塞拉门模型中,建立城轨塞拉门(35D锁)仿真模型[7-8]。城轨塞拉门(35D锁)主要由承载驱动机构、平衡轮组件、门扇、下摆臂组件、上滑道组件等组成,如图7所示,设置模型材料属性,添加约束副和接触副[9-11]。
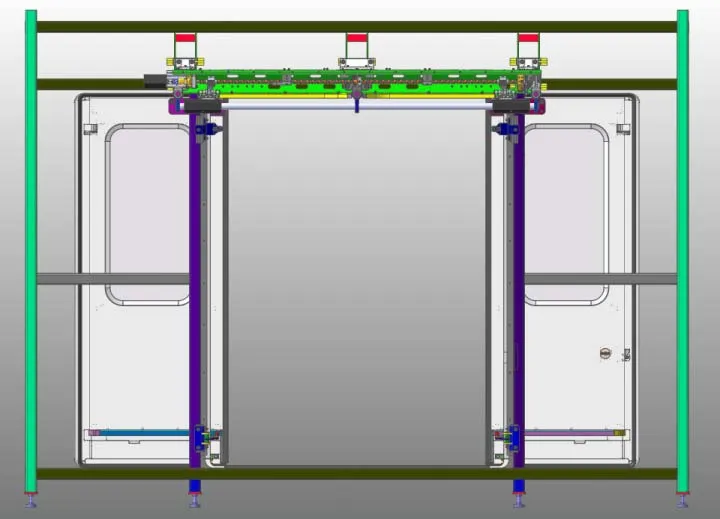
图7 城轨塞拉门三维装配模型Fig.7 3D assembly model of plug door in Urban Rail Transit
门系统各零部件之间存在摩擦力。为了加快仿真计算的速度,本文通过对长导柱和短导柱上的圆柱副添加摩擦来模拟整个门系统开关门过程中的阻力。对塞拉门系统进行实验测试,得到关门过程中电机的转角以及电机的输出扭矩曲线,如图8、9所示。利用电机的输出扭矩曲线来定义丝杆驱动扭矩的大小,同时取消驱动转速,利用RecurDyn中的 AutoDesign功能对圆柱副上的摩擦系数进行自动优化。

图8 电机的转角曲线Fig.8 Angle curve of motor
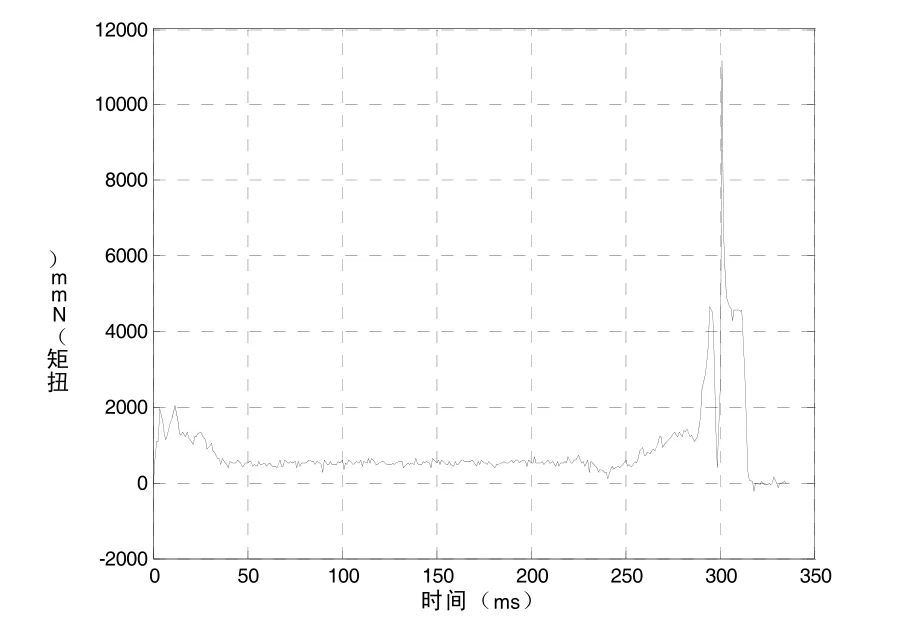
图9 电机的输出扭矩曲线Fig.9 Output torque curve of motor
3.2 仿真分析
对塞拉门系统进行实验测试,得到电机的转速曲线。以电机的转速曲线(如图10所示)作为丝杆驱动转速,对机械系统仿真模型进行刚柔耦合仿真分析,得到丝杆驱动扭矩的仿真结果。
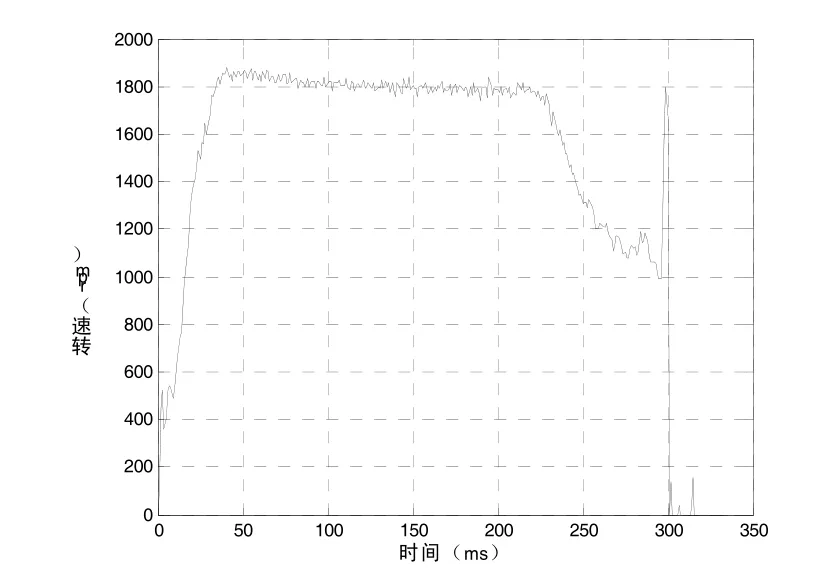
图10 电机的输出转速曲线Fig.10 Output speed curve of motor
将仿真结果与实验结果进行比较,如图11-12所示,若误差小于10%,说明所建模型能够满足精度要求;若误差大于10%,说明所建模型与真实模型存在较大的误差,需要对模型进行修正,主要对接触副参数进行修正,修正后的接触参数如表3所示,直至两者误差小于10%,至此,得到城轨塞拉门(35D锁)虚拟样机模型。

图12 开门仿真与实验结果对比Fig.12 comparison of simulation and experiment results of door opening

表3 修正后的接触副参数Tab.3 modified contact pair parameters
4 结论
35D锁是城轨车门常见的锁闭机构之一,对车辆的稳定运行有着重要影响。本文基于RecurDyn软件建立 35D锁闭机构的刚柔耦合仿真模型,并将35D锁闭机构作为子系统加入到城轨基型塞拉门仿真模型中,对门系统开关门过程的驱动扭矩进行了仿真,将仿真结果与实验数据进行对比,根据对比结果对相关参数进行了调整,得到了高精度城轨塞拉门(35D锁)动力学仿真模型,为后续35D锁车门结构优化及常见故障研究提供思路。
