新疆棉田耕后土壤模型离散元参数标定
2021-12-29宋少龙汤智辉刘进宝孟祥金梁宇超
宋少龙,汤智辉,郑 炫,刘进宝,孟祥金,梁宇超
新疆棉田耕后土壤模型离散元参数标定
宋少龙,汤智辉,郑 炫,刘进宝※,孟祥金,梁宇超
(1. 新疆农垦科学院机械装备研究所,石河子 832000;2. 农业农村部西北农业装备重点实验室,石河子 832000)
为提高耕后棉田分层施肥开沟覆土过程离散元仿真模拟的准确性,采用EDEM离散元软件对分层施肥作业土壤的堆积和滑落过程进行仿真模拟,来标定土壤接触参数。通过通用旋转中心组合试验,采用 Design-Expert 软件对试验数据进行回归分析,以实测土壤休止角、土壤与65 Mn钢滑动摩擦角为优化目标,获得最优的离散元接触参数组合为:土壤间恢复系数0.48、土壤间滚动摩擦系数0.56、土壤间静摩擦系数0.24、土壤与65 Mn钢间恢复系数0.5、土壤与65 Mn钢间滚动摩擦系数0.1、土壤与65 Mn钢间静摩擦系数0.31。为验证标定优化的离散元模型参数的准确性,对土壤堆积试验和滑落试验进行仿真试验与实际试验对比,两者相对误差分别为1.7%和2.5%;并在最优标定参数组合条件下,采用离散法仿真模拟分层施肥装置的开沟覆土过程,获得分层施肥装置5、6和7 km/h作业速度下,仿真试验和田间试验的工作阻力相对误差分别为10.2%、7.95%、7.04%,误差在可接受范围内。仿真试验和田间试验开沟覆土效果基本一致,验证了土壤参数标定的准确可靠,可为后期分层施肥装置减阻研究提供理论基础和技术支持。
土壤;离散元法;开沟覆土;分层施肥;参数标定
0 引 言
精准对行分层施肥技术是针对棉花、玉米等宽行距作物基肥施用的一项技术更新[1-3]。在秋季棉田耕整地作业后,利用分层施肥机按比例将肥料施于10~15和>15~20 cm的不同土层。春播时,利用导航系统将种子播于肥料上层,实现了肥料和种子的精准对行[4-5]。精准对行分层施肥技术主要特点为:在分层施肥的基础上保证每层肥料的深度的准确性、每层施肥量的精准性和种肥同行的一致性,不仅可以为作物提供不同的生长阶段合理的氮磷钾配比,还可有效减少肥料的使用量[6-8]。近年来,越来越多研究学者采用离散元法来研究农业机械触土部件与土壤的相互作用[9-12],而离散元法研究结果的有效性主要取决于土壤参数的准确与否,因此系统地研究耕后棉田土壤模型的离散元参数,有助于为基于离散元法分层施肥装置的优化设计提供理论依据。
目前,对于土壤形状、密度、泊松比和剪切模量等本征参数,可以通过仪器进行测量或从文献获取。土壤的接触参数很难进行实际测量,可借助离散元仿真优化标定来获得。对土壤、种子和肥料等农业物料参数标定方法主要采用堆积试验和滑落试验。戴飞等[13-14]应用Hertz-Mindlin无滑动接触模型,对标准球和非标准球两种沙土模型,以及全膜双垄沟覆膜土壤离散元接触参数进行标定。马帅等[15-16]采用整合延迟弹性模型(Hysteretic Spring Contact Model,HSCM)和线性粘附模型(Liner Cohesion Model,LCM)作为葡萄防寒土接触模型,对土壤间、土壤与清土部件间的接触参数进行了标定,该模型适用于具有一定含水率的砂壤土。吴孟宸等[17-18]采用仿真试验与真实试验相结合的方法,分别对花生和玉米接触参数进行参数标定。向伟等[19]采用EDEM离散元软件内置的 Hertz-Mindlin with JKR 模型作为黏型土壤的接触模型,利用Plackett-Burman试验和Box-Behnken试验对土壤仿真物理参数进行标定及优化。不同的农业物料的接触参数存在一定差异,很难通用。上述研究都是针对种子或耕前土壤的离散元参数的标定研究,由于土壤经过耕整地作业,疏松程度发生变化,上述的研究结果已经不适用于研究棉田耕后分层施肥、播种和移栽等作业。
因此,为了进一步提高离散元法在分层施肥作业过程研究的准确性,在参考已有的土壤接触参数范围的基础上,本文选用Hertz-Mindlin无滑动接触模型作为土壤的接触模型,采用堆积试验和滑落试验方法,对土壤间、土壤与分层施肥装置(65 Mn钢)间的恢复系数、滚动摩擦系数和静摩擦系数进行优化标定,在优化标定后的参数下建立土壤与分层施肥装置的仿真模型,通过实际堆积试验和滑落试验进行验证,并采用分层施肥作业的田间试验与仿真试验对比,进一步验证优化标定的土壤接触参数,以期为耕后棉田土壤离散元仿真参数设置提供参考。
1 材料与方法
1.1 接触模型选取
EDEM软件中为用户提供了多种基础模型,例如Hertz-Mindlin无滑动接触模型、Hertz-Mindlin粘结接触模型、线性粘附接触模型和Hertz-Mindlin with JKR模型等[20-21]。不同的接触模型可以仿真模拟不同质地类型的土壤,本文选用中国北疆地区耕后棉田土壤为研究对象,土壤质地属于砂砾。土壤在经过秸秆粉碎、犁地和整地等一系列作业,已经由板结状态变为相对松散状态,土壤含水率也进一步降低,土壤颗粒间的粘附力减小。Hertz-Mindlin无滑动接触模型不考虑颗粒间的相互吸引力,更适合用来研究耕后的土壤条件,其物理概化图如图1所示,因此本研究选用Hertz-Mindlin无滑动接触模型作为离散元仿真的接触力学模型。
1.2 标定参数选取
土壤形状、密度、含水率、休止角、泊松比和剪切模量都是土壤的本征参数,可以通过仪器进行测量或从文献获取。土壤的碰撞恢复系数,静摩擦系数和滚动摩擦系数等接触参数很难实际测量,可以通过离散元仿真参数优化来确定。因此本研究对土壤间、土壤与分层施肥装置(65 Mn钢)间的碰撞恢复系数、静摩擦系数和滚动摩擦系数进行参数标定。通过查阅参考文献,得到土壤-土壤间的静摩擦系数、滚动摩擦系数和碰撞恢复系数[22-26]分别在0.3~0.7、0.14~0.4和0.2~0.6范围,土壤-钢板(65 Mn钢)间的静摩擦系数、滚动摩擦系数和碰撞恢复系数[27-29]分别在0.3~0.6、0.04~0.2和0.28~0.6范围。
物理试验的耕后棉田土壤样品取于石河子市五工村地块的田间试验区域(44°17′34″N,85°58′34″E),采用五点取样法取分层施肥作业0~30 cm深度的土壤。将土样分为3份分别进行土壤粒径、密度测量和标定物理试验。土壤粒径采用土筛法,测得石砾(﹥1~2 mm)、砂粒(0.075~1 mm)和粉粒(﹤0.075 mm)占比分别为29.46%、56.31%和14.24%。密度采用五点采样法,利用环刀(100 cm3)和电子天平(精度0.01 g)测得土壤平均密度为1 250 kg/m3,其余参数查阅参考文献[1-3],获得土壤和65 Mn钢的其他离散元参数如表1所示。
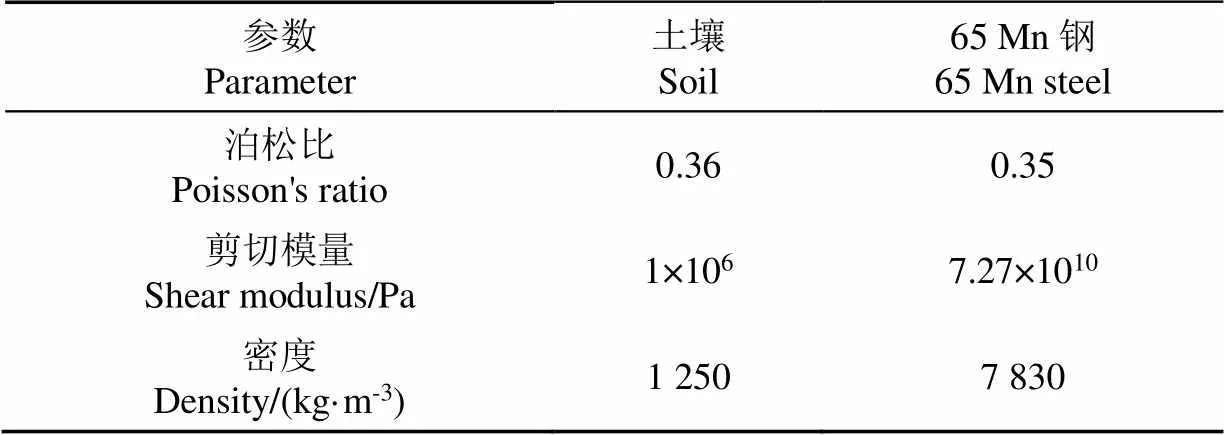
表1 离散元模型仿真参数
1.3 试验方法
1)土壤堆积试验
通过EDEM软件进土壤堆积仿真试验,接触模型选用Hertz-Mindlin(on slip),采用颗粒工厂在漏斗上方随机生成双球面、方形四球面和直线型四球面土壤模型,其中组成3种模型的颗粒半径分别为3、3和2 mm,土壤颗粒生成总质量为200 g。等待土壤颗粒运动到漏斗下方堆积稳定后,垂直截屏,通过屏幕角度软件Screen Protractor V4.0来测量模拟土壤堆4个不同方向的休止角。
2)土壤滑落试验
在EDEM软件中将提前用SolidWorks软件绘制好的斜面装置导入,在斜面上方设置生成土壤颗粒的颗粒工厂。设置颗粒工厂产生100 g土壤颗粒后,斜面沿转轴转动。当土壤颗粒刚开始从斜面滑落时,停止仿真,进行截屏,通过屏幕角度软件Screen Protractor V4.0来测量此时斜面的角度。土壤滑落仿真试验如图2所示。
1.4 试验设计
根据文献[22-26]选取土壤间的恢复系数1(0.2~0.6)、滚动摩擦系数2(0.14~0.4)、静摩擦系数3(0.3~0.7),土壤与钢板(65 Mn)间的恢复系数4(0.28~0.6)、滚动摩擦系数5(0.04~0.2)、静摩擦系数6(0.3~0.6)为试验影响因素[27-29],以土壤-土壤休止角1、土壤-钢板(65 Mn)滑动摩擦角2为评价指标,根据试验设计原则[13-15],确定编码系数分别为1.682和1.316,仿真试验因素水平编码如表2所示。

表2 仿真试验因素水平编码表
2 仿真结果与分析
2.1 土壤堆积和滑落仿真试验结果
采用二次回归正交旋转中心组合优化试验方法,应用Design-Expert10.0.4.0进行试验数据处理分析,土壤堆积和滑落仿真试验结果分别如表3、表4所示。

表3 土壤堆积仿真试验设计及结果
2.2 回归模型建立及显著性分析
应用Design-Expert10.0.4.0软件对土壤堆积仿真试验数据进行方差分析和多元回归拟合,土壤休止角1、滑动摩擦角2的方差分析表分别如表5所示。建立土壤休止角和滑动摩擦角的多元回归方程,并检验显著性。
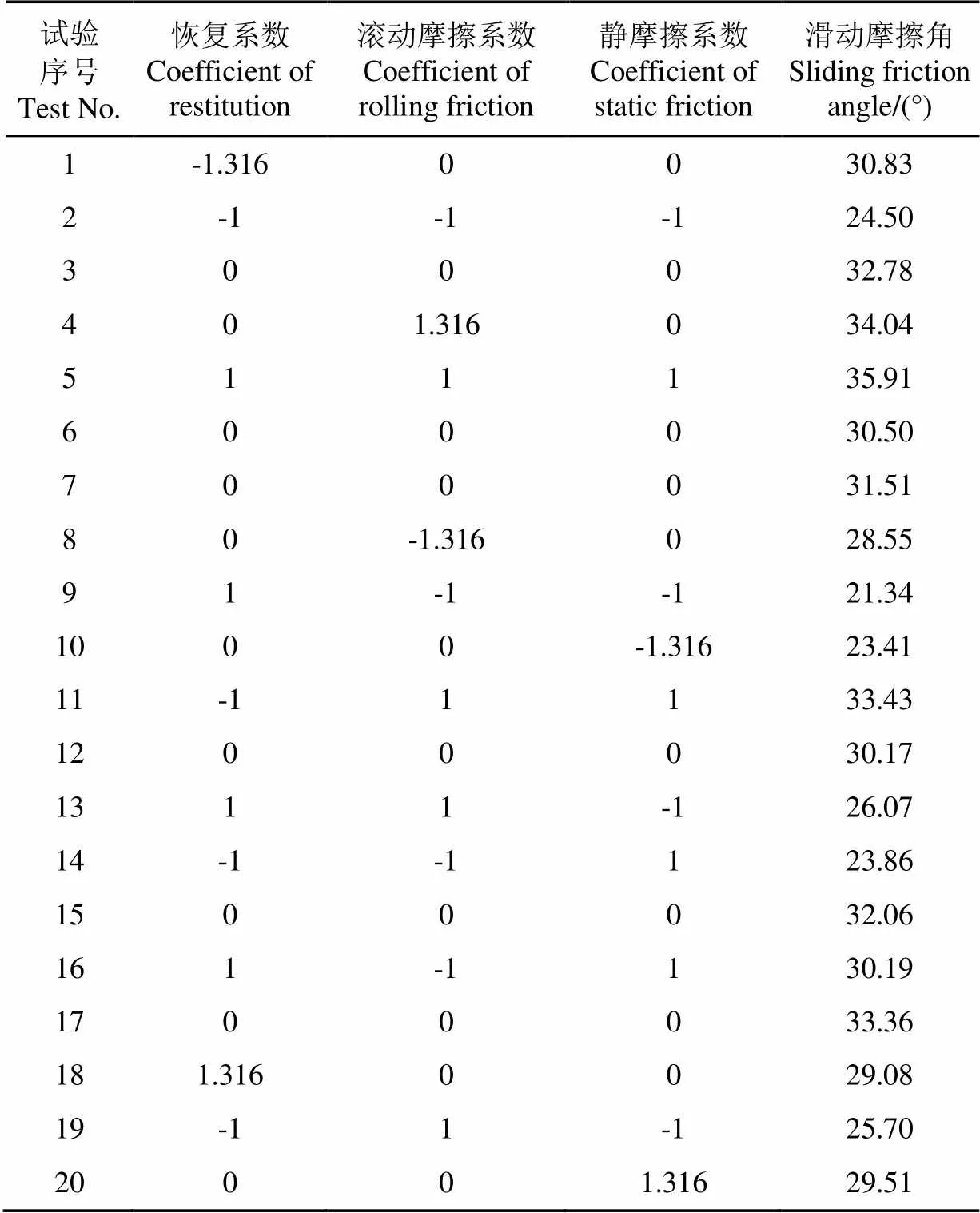
表4 土壤滑落仿真试验设计及结果
由表5可知,响应面回归模型中的土壤休止角和滑动摩擦角模型<0.01,表示回归模型极显著;失拟项值均大于0.05,表明两个模型的失拟不显著。两个试验的变异系数CV为11.4%和5.1%,表明两个试验的可靠性良好;两个模型的决定系数2为0.95和0.92,利用Design-Expert软件计算两个模型的校正决定系数2Adj为0.91和0.86,都接近于1,表明两个回归方程可信度高。精确度分别为16.70和12.94,均大于4,说明两个回归模型精度良好。可根据回归模型分别对土壤休止角和滑动摩擦角进行预测。回归项2、3、32影响极显著,1、22影响显著;5、6、62影响极显著,46影响显著。由回归方程系数的绝对值大小,得到各个因素对土壤休止角和滑动摩擦角模型影响的显著性顺序分别为:3>2>1、6>5>4。

式中1、2和3分别为土壤-土壤恢复系数、滚动摩擦系数和静摩擦系数的水平编码;4、5和6分别为土壤颗粒-钢板(65 Mn钢)恢复系数、滚动摩擦系数和静摩擦系数的水平编码;1为土壤-土壤的休止角,(°);2为土壤-钢板(65 Mn钢)的滑动摩擦角,(°)。

表5 土壤休止角、滑动摩擦角回归模型的方差分析
注:**表示极显著(<0.01);*表示显著(<0.05)。
Note: ** means extremely significant (<0.01); * means significant (<0.05).
3 标定参数确定与试验验证
3.1 最优标定参数确定
1)土壤休止角测定
土壤休止角通过土壤堆积试验进行测定,试验装置主要由漏斗、台架和倾角仪(分辨率:0.05°,精度:±0.2°)3部分组成。将田间试验区域的土壤样品200 g置于漏斗内,打开漏斗底部的小口,让土壤颗粒从漏斗内自由下落,在台架底部上会形成小型土壤堆,利用倾角仪从4个不同方向对土壤堆的休止角进行测量,每个方向之间呈90°,如图3所示,土壤休止角取4个方向的平均值,试验结果如表6所示。
2)土壤滑动摩擦角测定
土壤滑动摩擦角是通过土壤斜面滑落试验进行测定,主要测定土壤与65 Mn钢之间的滑动摩擦角,为标定土壤颗粒与65 Mn钢之间的接触参数提供参考。试验装置主要有自制的斜面装置和倾角仪(分辨率:0.05°,精度:±0.2°)两部分组成,其中斜面材料为65 Mn钢。将田间试验区域的土壤样品置于斜面上,通过调整推进轴螺杆改变斜面倾斜角度,当达到一定角度时,斜面上的土壤开始从斜面滑落,停止调整推进轴螺杆,并读出此时斜面倾角值,此时的角度值为土壤与65 Mn钢之间的滑动摩擦角,如图4所示。将试验反复重复5次,取平均值作为土壤与65 Mn钢之间的滑动摩擦角,其试验结果如表7所示。

1.数字倾角仪 2.漏斗 3.台架

表6 土壤休止角物理试验结果

表7 土壤滑动摩擦角物理试验结果
将实测的土壤休止角和滑动摩擦角结果分别代入式(1)~(2),得到多组优化解,选取仿真试验土壤休止角和滑动摩擦角与物理实测最接近的一组土壤接触参数。因此分层施肥仿真试验中所需的土壤模型参数如表8所示。
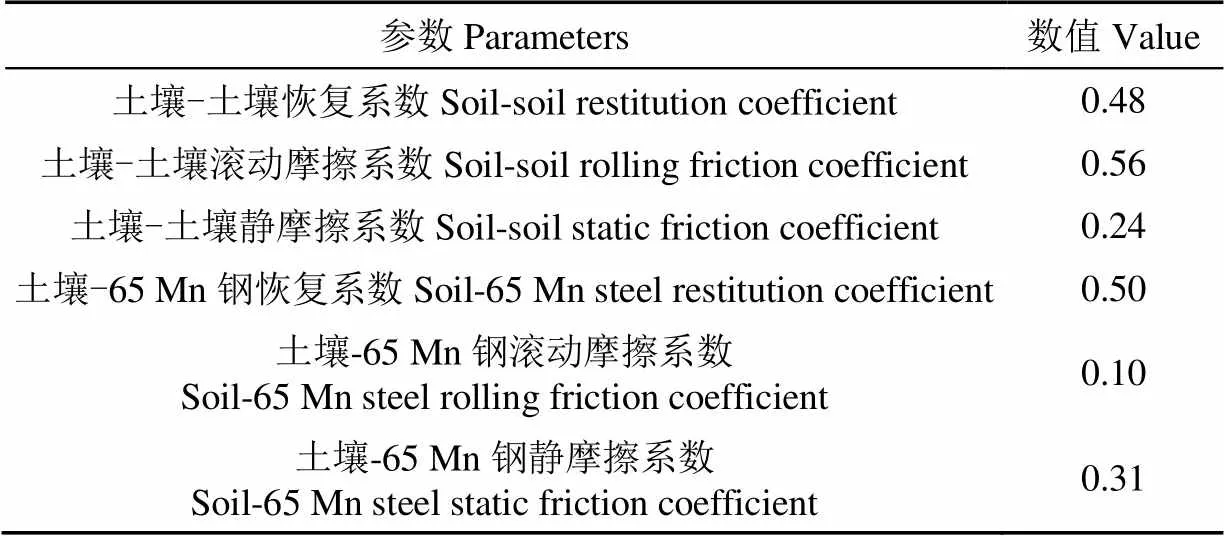
表8 土壤参数标定结果
3.2 物理试验验证
为验证土壤接触参数标定的合理性,将试验标定后的土壤接触参数值在EDEM软件进行设置,对土壤堆积试验和滑落试验进行模拟,测量土壤的休止角和土壤滑动摩擦角,并与土壤堆积和滑落物理试验测量的土壤休止角和土壤滑动摩擦角进行对比,如表9所示。

表9 试验结果对比
由表9可知,土壤接触参数标定后的土壤休止角和土壤滑动摩擦角与实际物理试验的误差分别为1.7%和2.5%,并且仿真土壤堆的锥形(图5a)与物理试验锥形(图5b)非常相似,优化标定后的土壤模型的堆积形状更加接近实际土壤堆积形状。
3.3 分层施肥装置开沟验证
3.3.1 仿真试验验证
为了进一步验证土壤接触参数优化标定后的准确性,采用EDEM软件对分层施肥装置开沟作业过程进行仿真模拟。通过EDEM颗粒库中自带的三种颗粒形状中的双球面(Dual Surface)、方形四球面(Square Four)和直线型四球面(Straight Four)来代表土壤颗粒中常见的3种土壤颗粒形状[30]。为降低计算机的计算量,对前期测量的土壤粒径进行了相应的放大,双球面颗粒模型分别由两个半径为3 mm的球形颗粒组成,方形四球面模型分别由4个半径为3 mm的球形颗粒组成,直线型四球面分别由4个半径为2 mm的球形颗粒沿直线组成。其中土壤-土壤、土壤-65 Mn钢间的接触模型选用Hertz-Mindlin(no-slip),仿真其他参数如表1和表8所示。利用EDEM的Geometries模块创建1 500 mm×500 mm×300 mm土槽模型,分层施肥装置仿真模型采用SolidWorks软件创建的.x_t文件直接导入,设置入土深度为30 cm,分层施肥装置的作业速度分别为5、6和7 km/h。仿真时间步长5.936×10-6s,瑞利时间步长为25%,仿真时间7 s。最优标定参数组合下的分层施肥装置开沟作业过程如图6所示(以6 km/h作业速度为例)。
图7为分层施肥装置在作业速度为5、6和7 km/h时土壤扰动情况。土壤颗粒的扰动速度是反映土壤扰动一项指标,土壤扰动越大,则土壤扰动速度越大,反之越小。从图中可以看出,土壤扰动区域主要集中在分层施肥装置前刃前方的破土区域和分层施肥装置作业后方的回土区域,前刃周围土壤扰动最大,分层施肥装置两侧土壤扰动最小。随着分层施肥装置速度增大,不仅分层施肥装置前方红色区域面积变大,其后方的红色区域也变长,说明作业速度越大,土壤的扰动越大。在不同作业速度情况下,分层施肥装置周围土壤扰动情况与田间土壤扰动一致,说明参数优化标定合理。
3.3.2 田间试验验证
田间试验所用主要设备如下:雷沃欧豹M904拖拉机、精准对行分层施肥机(图8)、遥测仪(Autobona,黑龙江省农业机械工程科学研究院),直尺、卷尺、秒表等。田间试验的试验地点为:石河子市五工村地块(44°17′34″N,85°58′34″E),土壤坚实度63.43 kPa,土壤含水率10.46%,作业深度30 cm。利用遥测仪的拉力传感器来测量分层施肥装置的工作阻力,可将分层施肥装置的实时受力情况回传电脑存储。将100 m测试区域划分为15 m的加速区、15 m的减速区和70 m的稳定区,并对稳定区的试验结果取平均值,见表10。
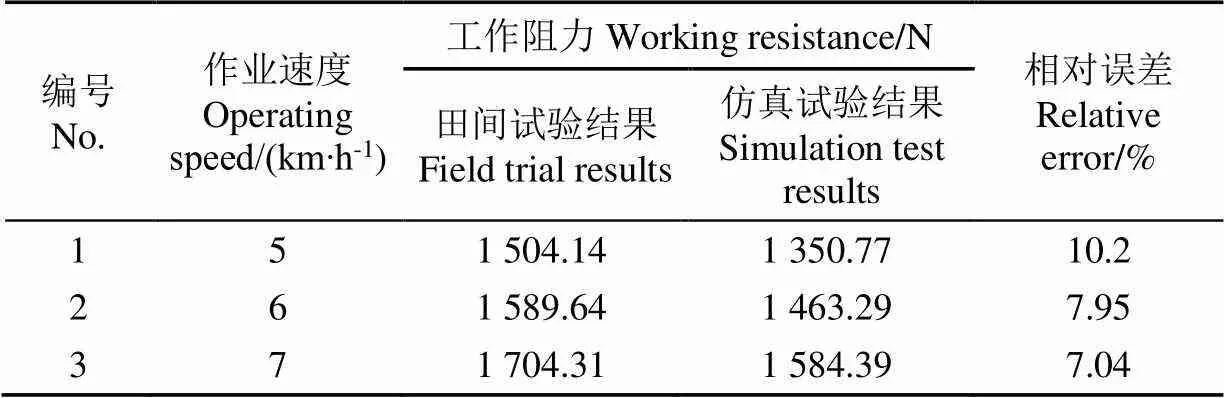
表10 模型验证结果
通过试验结果表10可知,分层施肥装置随着作业速度的增加,仿真试验结果和田间试验结果都有略微的增加,而且变化趋势也大致相同。在田间试验过程中,由于土壤中有棉杆和地膜等杂质的存在,土壤条件比较复杂,因此田间试验结果比仿真试验结果略大一些,但仿真试验相对于田间试验的试验误差在可接受的15%范围内,仿真试验的沟深和沟宽(图9a)与田间试验(图9b)一致,证明土壤接触参数的优化标定可靠有效。
4 结 论
1)利用EDEM软件进行土壤堆积仿真模拟,以土壤颗粒间恢复系数、滚动摩擦系数和静摩擦系数为试验因素,土壤休止角为试验指标,通过通用旋转中心组合试验,得出滚动摩擦系数和静摩擦系数对土壤休止角影响非常显著,恢复系数对土壤休止角影响显著;利用响应面优化方法获得土壤间接触参数的最优组合:恢复系数0.48、滚动摩擦系数0.56、静摩擦系数0.24。
2)采用滑落实试验对土壤与65 Mn钢间的接触参数进行优化标定,以土壤与65 Mn钢间恢复系数、滚动摩擦系数和静摩擦系数为试验因素,土壤滑动摩擦角为试验指标,通过通用旋转中心组合试验,表明只有土壤间恢复系数对土壤滑动摩擦角无影响,其他接触参数均有显著影响;获得土壤间接触参数的最优组合:恢复系数0.5、滚动摩擦系数0.1、静摩擦系数0.31。
3)为验证所标定优化的离散元模型参数的准确性,对模拟仿真与实际试验的土壤休止角、土壤与65 Mn钢滑动摩擦角进行了对比,两者相对误差分别为1.7%和2.5%,在最优标定参数组合条件下,采用离散法仿真模拟分层施肥装置的开沟覆土过程,获得分层施肥装置5、6和7 km/h作业速度下,仿真试验和田间试验的工作阻力相对误差分别为10.2%、7.95%和7.04%,误差在可接受范围内。仿真试验和田间试验开沟覆土效果基本一致,验证了土壤参数标定的准确可靠,可为后期分层施肥装置减阻研究提供理论基础和技术支持。
[1] 赵岩,陈学庚,郑炫,等. 精准对行分层施肥技术研究[J]. 绿洲农业科学与工程,2016,3:25-29.
Zhao Yan, Chen Xuegeng, Zheng Xuan, et al. Research on accurate layered fertilization technology[J]. Oasis Agriculture Science and Engineering, 2016, 3: 25-29. (in Chinese with English abstract)
[2] 宋少龙,张东超,汤智辉,等. 基于离散元法的分层施肥靴参数优化与试验[J]. 中国农业大学学报,2020,25(10):125-136.
Song Shaolong, Zhang Dongchao, Tang Zhihui, et al. Parameter optimization and test of layered fertilization boot based on discrete element method[J]. Journal of China Agricultural University, 2020, 25(10): 125-136. (in Chinese with English abstract)
[3] 刘进宝,汤智辉,郑炫,等. 对行开沟分层深施肥铲的设计与试验[J]. 甘肃农业大学学报,2021,56(2):169-176,186.
Liu Jinbao, Tang Zhihui, Zheng Xuan, et al. Design and experiment of deep fertilizing shovel for furrow and layering[J]. Journal of Gansu Agricultural University, 2021, 56(2): 169-176, 186. (in Chinese with English abstract)
[4] Singh D, Ramteke R, Khan I R. Yield enhancement through fertilizer placement by machine below the seed in rain-fed soybean crop under vertisols[J]. Agricultural Research, 2016, 5(1): 104-108.
[5] Nkebiwe P M, Weinmann M, Bar-Tal A, et al. Fertilizer placement to improve crop nutrient acquisition and yield: a review and meta-analysis[J]. Field Crops Research, 2016, 196: 389-401.
[6] Ning C C, Gao P D, Wang B Q, et al. Impacts of chemical fertilizer reduction and organic amendments supplementation on soil nutrient, enzyme activity and heavy metal content[J]. Journal of Integrative Agriculture, 2017, 16(8): 1819-1831.
[7] 张圣光. 北斗卫星导航系统在农业机械化中的应用与发展前景[J]. 现代农业科技,2014(4):184-189.
Zhang Shengguang. Application and development of Beidou navigation system in mechanised agriculture[J]. Modern Agricultural Science and technology, 2014(4): 184-189. (in Chinese with English abstract)
[8] 吴海玲,高丽峰,汪陶胜,等. 北斗卫星导航系统发展与应用[J]. 导航定位学报,2015,3(2):1-6.
Wu Hailing, Gao Lifeng, Wang Taosheng, et al. Development and application of Beidou satellite navigation system[J]. Journal of Navigation and Positioning, 2015, 3(2): 1-6. (in Chinese with English abstract)
[9] 张锐,李建桥,李因武. 离散单元法在土壤机械特性动态仿真中的应用进展[J]. 农业工程学报,2003,19(1):16-19.
Zhang Rui, Li Jianqiao, Ji Yinwu. Development of simulation on mechanical dynamic behavior of soil by distinct element method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2003, 19(1): 16-19. (in Chinese with English abstract)
[10] 马跃进,王安,赵建国,等. 基于离散元法的凸圆刃式深松铲减阻效果仿真分析与试验[J]. 农业工程学报,2019,35(3):16-23.
Ma Yuejin, Wang An, Zhao Jianguo, et al. Simulation analysis and experiment of drag reduction effect of convex blade subsoiler based on discrete element method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(3): 16-23. (in Chinese with English abstract)
[11] 方会敏,姬长英,Farman Ali Chandio,等. 基于离散元法的旋耕过程土壤运动行为分析[J]. 农业机械学报,2016,47(3):22-28.
Fang Huimin, Ji Changying, Farman Ali Chandio, et al. Analysis of soil dynamic behavior during rotary tillage based on distinct element method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3): 22-28. (in Chinese with English abstract)
[12] 顿国强,陈海涛,李兴东,等. 基于EDEM的轻型凿式深松铲土壤耕作载荷仿真分析[J]. 农机化研究,2018,40(3):8-12.
Dun Guoqiang, Chen Hailu, Li Xingdong, et al. Simulation analysis of light chisel-type subsoiler soil tillage load based on EDEM[J]. Journal of Agricultural Mechanization Research, 2018, 40(3): 8-12. (in Chinese with English abstract)
[13] 戴飞,宋学锋,赵武云,等. 全膜双垄沟覆膜土壤离散元接触参数仿真标定[J]. 农业机械学报,2019,50(2):49-56.
Dai Fei, Song Xuefeng, Zhao Wuyun, et al. Simulative calibration on contact parameters of discrete elements for covering soil on whole plastic film mulching on double ridges[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(2): 49-56. (in Chinese with English abstract)
[14] 张锐,韩佃雷,吉巧丽,等. 离散元模拟中沙土参数标定方法研究[J]. 农业机械学报,2017,48(3):49-56.
Zhang Rui, Han Dianlei, Ji Qiaoli, et al. Calibration methods of sandy soil parameters in simulation of discrete element method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(3): 49-56. (in Chinese with English abstract)
[15] 马帅,徐丽明,袁全春,等. 葡萄藤防寒土与清土部件相互作用的离散元仿真参数标定[J]. 农业工程学报,2020,36(1):40-49.
Ma Shuai, Xu Liming, Yuan Quanchun, et al. Calibration of discrete element simulation parameters of grapevine antifreezing soil and its interaction with soil-cleaning components[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(1): 40-49. (in Chinese with English abstract)
[16] 王宪良,胡红,王庆杰,等. 基于离散元的土壤模型参数标定方法[J]. 农业机械学报,2017,48(12):78-85.
Wang Xianliang, Hu Hong, Wang Qingjie, et al. Calibration method of soil contact characteristic parameters based on DEM theory[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(12): 78-85. (in Chinese with English abstract)
[17] 吴孟宸,丛锦玲,闫琴,等. 花生种子颗粒离散元仿真参数标定与试验[J]. 农业工程学报,2020,36(23):30-38.
Wu Mengchen, Cong Jinling, Yan Qin, et al. Calibration and experiments for discrete element simulation parameters of peanut seed particles[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(23): 30-38. (in Chinese with English abstract)
[18] 王云霞,梁志杰,张东兴,等. 基于离散元的玉米种子颗粒模型种间接触参数标定[J]. 农业工程学报,2016,32(22):36-42.
Wang Yunxia, Liang Zhijie, Zhang Dongxing, et al. Calibration method of contact characteristic parameters for corn seeds based on EDEM[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(22): 36-42. (in Chinese with English abstract)
[19] 向伟,吴明亮,吕江南,等. 基于堆积试验的黏壤土仿真物理参数标定[J]. 农业工程学报,2019,35(12):116-123.
Xiang Wei, Wu Mingliang, Lyu Jiangnan, et al. Calibration of simulation physical parameters of clay loam based on soil accumulation test[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(12): 116-123. (in Chinese with English abstract)
[20] 王国强,郝万军,王继新. 离散单元法及其在EDEM上的实践[M]. 西安:西北工业大学出版社,2010:1-3.
[21] 胡国明. 颗粒系统的离散元素法分析仿真:离散元素法的工业应用与EDEM软件简介[M]. 武汉:武汉理工大学出版社,2010:1-2.
[22] 金丽丽,姬长英,方会敏,等. 变量施肥机连续混合装置中肥料颗粒运动的数值分析[J]. 浙江农业学报,2015,27(2):261-265.
Jin Lili, Ji Changying, Fang Huimin, et al. Numerical simulation of mixing process of fertilizer in continuous mixer of variable rate fertilizer applicator[J]. Acta Agriculturae Zhejiangensis, 2015, 27(2): 261-265. (in Chinese with English abstract)
[23] González-Montellano C, Ramírez á., Gallego E, et al. Validation and experimental calibration of 3D discrete element models for the simulation of the discharge flow in silos[J]. Chemical Engineering Science, 2011, 66(21): 5116-5126.
[24] Yu Y, Henrik S. Discrete element method simulation of properties of a 3D conical hopper with mono-sized spheres[J]. Advanced Powder Technology, 2011, 22(3): 324-331.
[25] 苑进,刘勤华,刘雪美,等. 多肥料变比变量施肥过程模拟与排落肥结构优化[J]. 农业机械学报,2014,45(11):81-87.
Yuan Jin, Liu Qinhua, Liu Xuemei, et al. Granular multi-flows fertilization process simulation and tube structure optimization in nutrient proportion of variable rate fertilization[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(11): 81-87. (in Chinese with English abstract)
[26] Toschkoff G, Just S, Funke A, et al. Spray models for discrete element simulations of particle coating processes[J]. Chemical Engineering Science, 2013, 101: 603-614.
[27] Wu S, Kou M, Jian X, et al. DEM simulation of particle size segregation behavior during charging into and discharging from a Paul-Wurth type hopper[J]. Chemical Engineering Science, 2013, 99(32): 314-323.
[28] 周韦,王金峰,王金武,等. 基于EDEM的水田深施肥机构螺旋钢丝的数值模拟与分析[J]. 农机化研究,2015,37(1):27-30. Zhou Wei, Wang Jingfeng, Wang Jingwu, et al. Numerical simulation and analysis of a fertilizer can on fertilizer spreader based on EDEM[J]. Journal of Agricultural Mechanization Research, 2015, 37(1): 27-30. (in Chinese with English abstract)
[29] Yu Y, Henrik S. Experimental and DEM study of segregation of ternary size particles in a blast furnace top bunker model[J]. Chemical Engineering Science, 2010, 65(18): 5237-5250.
[30] 王燕. 基于离散元法的深松铲结构与松土效果研究[D]. 长春:吉林农业大学,2014. Wang Yan. Simulation Analysis of Structure and Effect of the Subsoiler Based on EDEM[D]. Changchun: Jilin Agricultural University, 2014. (in Chinese with English abstract)
Calibration of the discrete element parameters for the soil model of cotton field after plowing in Xinjiang of China
Song Shaolong, Tang Zhihui, Zheng Xuan, Liu Jinbao※, Meng Xiangjin, Liang Yuchao
(1.,,832000,; 2.,,832000,)
A multi-layer fertilization has been considered as an efficient way to meet the needs of fertilizers at different growth stages of crops. A layered fertilization device is usually used for the process of ditching and covering soil after ploughing. In this case, the movement of soil particles is very complicated. In this study, an EDEM discrete element software was used to simulate the process of soil accumulation and sliding in the layered fertilization area, in order to calibrate soil contact parameters. A Hertz-Mindlin non-slip model was selected to simulate the contact surface of soil-soil and soil-layered fertilization device (65 Mn steel), according to the soil characteristics of cotton fields after ploughing. Three common shapes of soil particles were represented by dual surface, square four, and straight four. The calibration parameters were also selected to determine the ranges. Specifically, the static friction coefficient, rolling friction coefficient, and collision recovery coefficient between soil-soil and soil-65 Mn steel were used as test factors, while the soil angle of repose, and sliding friction angle of soil-Mn steel were used as evaluation indicators. The universal rotation center combination test was conducted to verify the model. The Design-Expert software was then utilized to perform the regression on the test data. The results showed that the coefficient of recovery from the collision of soil-soil and soil-65 Mn steel presented no significant effect on the angle of repose and sliding friction of soil. Taking the measured soil angle of repose and the sliding friction angle between the soil and 65 Mn steel as the optimization objectives, an optimal combination of discrete element contact parameters was obtained: the coefficient of restoration between soils was 0.48, the coefficient of rolling friction between soils was 0.56, the coefficient of static friction between soils was 0.24, the coefficient of restitution between the soil and 65 Mn steel was 0.5, the coefficient of rolling friction between soil and 65 Mn steel was 0.1, and the coefficient of static friction between soil and 65 Mn steel was 0.31. A soil accumulation test and the sliding test were also compared with the actual test, in order to verify the accuracy of the optimized parameters. The relative errors of the two tests were 1.7% and 2.5%, respectively, under the optimal combination of calibration parameters. Consequently, the discrete elements can be expected to simulate the ditching and soil covering process of the layered fertilization device. The relative errors of simulation and field test were 10.2%, and 7.95%, respectively, at the operating speed of 5, 6, and 7 km/h of layered fertilization device. Among them, the error of 7.04% was within the acceptable range. Consequently, the simulation and field test presented basically the same effect of ditching and covering soil, indicating the high accuracy and reliability for the calibration of soil contact parameters. The finding can provide strong theoretical and technical support for the later research on drag reduction of layered fertilization devices.
soils; discrete element method; trenching and mulching; stratified fertilization; parameter calibration
宋少龙,汤智辉,郑炫,等. 新疆棉田耕后土壤模型离散元参数标定[J]. 农业工程学报,2021,37(20):63-70.doi:10.11975/j.issn.1002-6819.2021.20.007 http://www.tcsae.org
Song Shaolong, Tang Zhihui, Zheng Xuan, et al. Calibration of the discrete element parameters for the soil model of cotton field after plowing in Xinjiang of China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(20): 63-70. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.20.007 http://www.tcsae.org
2021-06-21
2021-10-02
国家重点研发计划课题(2016YFD0200604);新疆农垦科学院院级科技计划项目(2020YJ012)
宋少龙,研究方向为精准施肥技术与装备。Email:ssl4407@163.com
刘进宝,副研究员,研究方向为高端农机装备与先进制造技术。Email:jinbao1226@126.com
10.11975/j.issn.1002-6819.2021.20.007
S152.9;S22
A
1002-6819(2021)-20-0063-08