基于遥感技术的库木塔格沙漠边界提取研究
2021-12-29武红旗范燕敏谷金芝史名杰
于 娟,武红旗,范燕敏,谷金芝,史名杰
(新疆农业大学草业与环境科学学院,新疆乌鲁木齐830052)
沙漠作为一种自然资源对人们的生存环境、生活质量等方面产生着不同程度的影响。沙漠边界的提取可以为研究人员提供有价值的信息,将其作为评估沙漠地区面积变化、沙漠化程度等方面的参考资料,因此沙漠边界的提取工作具有重要价值[1-2]。相对于实地调查来说,遥感技术不用与物体直接接触,能真实、迅速反映地表情况,成本效益优势凸显的较为明显,因此可以作为沙漠边界提取的一种手段[3-4]。
因沙漠区域具有明显不同于其他地物的表面纹理[5],采用纹理特征对图像进行分类,对沙漠边界进行提取。采用监督分类方法中的最大似然法和支持向量机对遥感信息进行分类,针对传统超像素算法因紧凑性因子选取主观性较强而导致结果边缘贴合度低、精确度不高的缺陷进行了改进。本研究旨在利用遥感技术快速、准确提取鄯善县的库木塔格沙漠边界,为生态环境治理、自然资源确权等工作提供依据。
1 材料与方法
1.1 研究区概况与数据来源
鄯善县是世界上距离沙漠最近的城市。本文研究的库木塔格沙漠位于新疆维吾尔自治区鄯善县,坐落于鄯善县以南,与鄯善老城东环路南段相连,西距乌鲁木齐280 k m,东距哈密340 k m。地理位置91°25′~94°00′E、38°20′~40°50′N。该沙漠风沙地貌类型齐全,周围具有丰富的自然景观和人文景观。库木塔格沙漠植被受周围环境条件的影响,天然植被类型及分布极不均匀。沙漠腹地植被分布极为稀少,只有在局部地区地下水埋深较浅处,零星稀疏的生长着柽柳、芦苇、骆驼刺等植物。因此,研究库木塔格沙漠边界提取有利于为干旱半干旱区沙漠边界研究提供参考。
研究区遥感数据为Landsat8的O L I(OperationalLandImager,O L I)成像仪影像作为实验数据源。由于1景图像已经可以覆盖研究区域,所以选择了日期为2020年8月1日,编号为L C814032020 214LG N00的遥感数据,平均云量为0.07%。
1.2 研究方法
本文采用了最大似然法和支持向量机和超像素算法来对遥感影像进行分类处理。最大似然法使用的很广泛,是较为传统且经典的一种方法。支持向量机是一种在统计学基础上发展起来的新型算法,其优点很多,比如结构简单、可有效处理非线性、高维数据等。由于其优越的性能被逐步大范围的应用到遥感图像处理中[6-7]。针对传统超像素算法的紧凑性因子Nc的选取很大程度上依靠经验来完成,选取不当则产生边缘不够贴合、精确度下降等问题[8-9],本文将Nc值在每次迭代过程中自动改进。光谱值差异不明显且均匀度较高时,Nc值较大,使得分割结果形状更加紧凑和规则;如果光谱值差异明显且均匀度不高时,Nc值较小,可以有效的使边缘的贴合度增加,解决贴合度差、精度不高等问题。
在人工测绘工作中主要利用数码相机、手持G PS、天宝R8 RT K测量仪、笔记本电脑等工具完成。由于库木塔格沙漠地形崎岖、地势复杂且面积较大,沙漠边沿土质松软,尤其是沙漠深处南部区易出现陷车等状况,测绘工作难度较大。
2 沙漠边界提取
2.1 图像预处理
本文对原始数据的预处理包括辐射定标、大气矫正、影像裁剪和最小噪声分离4部分。图像的预处理均利用E N V I 5.3遥感图像处理软件完成。
2.2 监督分类方法提取
考虑到沙漠区域具有明显不同于其他地物的表面纹理,可以改善提取效果,解决边缘碎屑化等问题,因此选择基于纹理特征对其进行提取分析。此次纹理提取采用了E N V I 5.3软件中的Co-occurrence M easures工具选项提取8个基于11x11窗口的二阶矩阵纹理滤波。
2.3 基于超像素的沙漠边界提取
耕地和人造建筑等非沙漠地物,空间结构通常呈圆形或矩形;由于其空间分布较为规律,通过边缘检测对其闭合区域进行形状的判断分析并处理,对于圆形或矩形等形状的即可直接去除。对于无明显空间结构特征的沙漠过渡带、戈壁等非沙漠地物,可以用归一化沙漠差异指数N DD I进行去除。
3 结果与分析
3.1 库木塔格沙漠边界提取结果叠加分析
图1(a)、(b)、(c)3幅图分别为最大似然法、支持向量机、改进的超像素算法所得沙漠边界与人工测绘法所得沙漠边界进行叠加而得。库木塔格沙漠边界提取的难点在于右下角的沙漠过渡带部分,此部分存在较多弱边缘且对比度不清晰,对沙漠边界的提取带来了一定的挑战。由于采用了纹理特征,提取效果较好的保持沙漠边界的完整性。改进的超像素算法可以较好地去除与沙漠边界相对较远非沙漠地物。对于沙漠周边的非沙漠地物,则综合使用空间结构信息和光谱信息来去除,能够使沙漠边界提取结果的边缘贴合度更高。
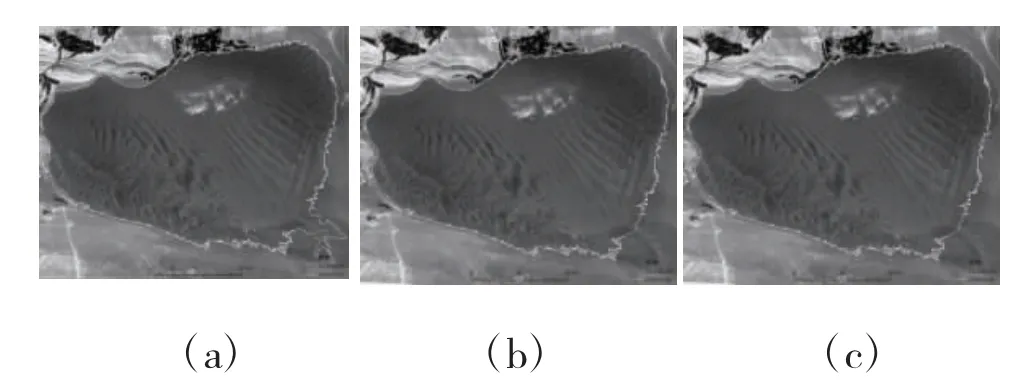
图1 库木塔格沙漠区域提取结果叠加图
3.2 精度对比分析
本文对沙漠边界提取算法的分类精度和边界精度分别进行了计算,其量化见表1。基于紧凑性因子改进的超像素总体精度达到了93.5%,K a pp a系数为0.88,相对监督分类方法而言精度更高,更适用于沙漠边界提取。在监督分类方法中,支持向量机相较于最大似然法优势较为突出,最大似然法的精度最低,可靠性较差。

表1 精度统计
本文的边界精度则是以人工测绘法所得面积为基准,对其他方法所得面积与之的差值进行比较,计算得到误差(k m2)和相对误差(%)。可以发现:运用改进的超像素算法的实验结果相较于监督分类方法精度更好,验证了改进算法的可靠性。
通过对这3种方法进行比较分析,可以说明支持向量机和改进的超像素算法在本文的实验中可靠性较好。造成误差主要是影像的东北角和东南角部分沙漠与戈壁的纹理较为接近,引起了部分的误判。但总体上,每种方法的相对误差也控制在5%以内,从而验证了基于遥感技术对沙漠边界提取有较好的效果。
4 结论
本研究所采用的3种方法中,基于紧凑性因子改进的超像素算法分类精度最高,总体精度为93.5%,K a pp a系数为0.88。监督分类方法中支持向量机的总体精度为90.8%,K a pp a系数为0.83;最大似然法总体精度为84.3,K a pp a系数为0.75;改进的超像素算法与支持向量机的整体精度均高于90%,K a pp a系数均大于0.8,能够满足分类精度要求。最大似然法的精度相较于其他2种方法而言可靠性较低。
在边界精度方面,最大似然法误差为105.3k m2,相对误差是4.86%;支持向量机误差为65.7 k m2;相对误差是3.03%;基于紧凑性因子的改进超像素算法误差为59.6 k m2,相对误差是2.75%。由边界精度分析可知,3种方法所得的相对误差均小于5%,能够满足边界精度的要求。但是改进的超像素算法所得面积与人工测绘法所得面积最接近,说明改进的超像素算法边界精度最高。
通过分类精度和边界精度的对比分析,证明了改进的超像素算法相较于其他2种方法具有一定的优势,在高效性、准确性方面表现均强于其他2种方法。在沙漠边界提取工作中的适用性较强,能够较好的完成沙漠边界的提取工作。同时,证明了基于中等分辨率的多光谱遥感影像在进行县域沙漠边界的提取时,不仅能够针对目标进行正确判读,而且针对沙漠边界提取的精度较为可靠。
