林区高精路网地图构建
2021-12-28纪昊男杨志高
纪昊男,王 颖,2,余 谦,2,杨志高
(1.中南林业科技大学 林学院,湖南 长沙 410004;2.湖南汽车工程职业学院,湖南 株洲 412001)
林区道路是林区重要的基础设施,林区道路建设对助推林区脱贫攻坚和乡村振兴具有重要的意义[1]。林区高精路网地图在林区经营管理、防灾减灾、森林旅游等林业经营活动中具有重要的作用。森林经营正朝着精准化、数字化方向发展,森林旅游方兴未艾,无人驾驶游览车、摆渡车正在一些景区开展实验,林区高精路网地图的构建将成为林业领域的下一个“新基建”。高精地图构建正面临一个现实矛盾。目前高精地图的构建主要针对城市主干道和高速公路[2];林区因其地形地貌、行业规范、道路功能等具有特殊性,短期内无法快速规模化进行林区高精路网地图构建[3]。构建符合自动驾驶、森林经营、应急救援、旅游等标准的林区高精路网地图,是林区可持续发展的必然要求。
近年来,无人机倾斜摄影测量技术在林业领域应用较为广泛[4],小型旋翼无人机体积小,采集数据灵活,可小范围低空作业,拍摄影像分辨率高,在林区作业时小型旋翼无人机具有明显的优势[5-7]。因此使用大疆Phantom 4 RTK 小型旋翼无人机作为主要测绘工具,采用倾斜摄影测量与地面近景摄影测量相结合的测量方法[8-9]。在充分利用无人机倾斜摄影快速获取影像与点云数据的同时,利用地面补拍获取被遮挡区域的影像与点云数据,将两种点云数据配准融合,同时融入影像数据,完成模型渲染,构建林区精细三维实景模型。借助湖南中图通地理遥感信息服务有限公司开发的PSG 3D 地理信息数据提取工具,从林区精细三维实景模型上采集高精度地理信息数据,在植被和建筑物影响采集时,可以对模型进行切割显示,切割后可以清晰的绘制道路,并在采集过程中严格把好质量关,从而构建低成本、高精度的林区路网地图,通过在孟公山林场进行实验,验证该方法的有效性。
1 数据与方法
1.1 研究区概况
研究区位于湖南省永州市的国有孟公山林场,该林场坐落在中心城区东郊的伊塘镇,林场中心地理位置为111°45′54″E,26°23′02″N。最低海拔140.5 m,最高海拔214.6 m。总面积达520 hm2,具有丰富的自然景观。林场生态资源丰富,汇集各类植物2 000多种,其中国家一级保护树种10种、二级保护树种37 种、三级保护树种31 种,森林覆盖率达94.5%。并且林场内道路错综复杂,道路被林木树冠遮挡严重,是构建林区高精路网地图的理想研究区。
1.2 数据采集
普通电子导航地图精度通常约5 m,而高精度地图的精度通常需要达到20 cm 左右[10-11],因此外业数据的质量尤其重要。利用GPS-RTK 布设像控点后,对整个林场进行了无人机航测。并在数据采集过程中严格把好数据质量关,遵守航测规范,经现场质检,数据质量符合高精地图构建所需要达到的要求。
1.2.1 数据采集设备
实验中使用的GPS 设备为华星A16,华星A16 是一款极致、智能、轻巧的测量型GNSS 接收机。使用的无人机设备为大疆Phantom 4 RTK。该型无人机是一款紧凑型四旋翼高精度航测专用无人机,其具有厘米级导航和定位系统以及高性能成像系统,适用于低空摄影测量。它便于携带,易于上手,航测效率因此得到全面提升,为用户带来厘米级精确数据。
1.2.2 无人机倾斜影像获取
航拍区不仅森林密布、而且建筑物、道路等附属设施齐备。航拍严格遵循无人机航空摄影相关要求和规范,利用航线规划软件,根据测区平均基准面高程与最高点高程进行航线规划,设计无人机飞行航高120 m,航向重叠度与旁向重叠度均为70%。由于航拍面积约为1.4 km2,并且需要将无人机单块电池的飞行时间控制在30 min以内,所以无人机在低空摄影测量时无法在一个架次完成倾斜摄影任务,因此要将其分为多个架次。此次飞行作业任务共16 个架次,分别从前、后、左、右、正5 个方向共获取4 819 张影像。经现场检查,获取的影像清晰、色相饱和,无偏色,视觉效果好。图1为航线规划图,图2为航拍影像获取示例图。

图1 无人机航线规划图Fig.1 UAV route planning

图2 倾斜影像获取Fig.2 Tilt image acquisition
1.2.3 阴影及林冠遮挡部分的影像获取
由于林区冠层起伏复杂、形状不规则、树冠间相互衔接密闭、光线条件复杂、纹理重复度高、像对间存在非刚体性变化,因此利用倾斜摄影技术对林区进行三维建模时,易出现无法拍摄到林冠下景观、难以找到地面控制点等问题。实验中利用无人机在林冠下和道路之间进行贴地飞行,在无法进行飞行的复杂环境中,采取手持无人机且保证无人机平稳的移动,对林冠下前后左右四个方向采集影像数据并且保证影像正向重叠率与旁向重叠率分别为80%左右。
1.3 林区高精路网地图构建方法
1.3.1 林区高精路网地图构建流程
无人机倾斜摄影技术从多角度拍摄获取正射影像和倾斜影像,通过空三加密和匹配算法,从多视影像中提取更多特征点构成三维密集点云。近景影像的获取方式是使用无人机在近地面以一定角度获取,即可直接获取林冠下地表物体的表面信息,形成林冠下遮挡区域的三维密集点云。两种方法均生成大量点云数据,为倾斜摄影获取的点云与林冠下点云的融合提供了可能。无人机倾斜摄影技术能够大面积、快速获取地物三维信息和纹理信息,但获取的地面物体精度偏低。利用近景摄影测量在林冠下补拍影像获取的信息正好能够弥补无人机倾斜摄影的不足,能够精确获取林冠下被遮挡区域的地物信息。采用无人机倾斜摄影测量技术与林冠下近景摄影测量技术补拍影像相结合的三维建模方法,不仅能提高模型精度,还可解决倾斜摄影构建三维建模时林冠间出现的空洞、林冠下地物被遮挡、近地面模型局部拉花等问题。通过此方法可实现林区精细三维实景模型构建,进而完成林区高精路网地图构建,技术流程如图3所示。
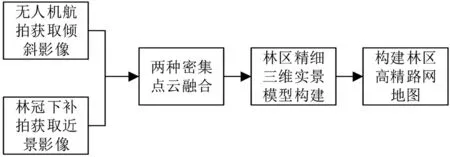
图3 林区高精路网地图构建流程Fig.3 Flow chart of forest road network construction
1.3.2 林区精细三维实景模型构建方法
利用倾斜影像和野外控制点测量数据,进行多视影像空三加密和密集匹配,空三加密采用双频GPS 辅助倾斜摄影影像和少量图像控制点联合平差方式,实现倾斜POS 辅助光束法平差[12]。由于倾斜影像倾角大,现有的区域网平差方法难以符合多视影像区域网平差精度要求。因此采用基于倾斜航摄仪结构设计参数的、容错性强、收敛域大的光束法区域网平差方法,以四元数法作为区域网平差的基础模型[13],通过平差得出地物间的物方位置关系[14],并自动匹配影像中的同名点构成密集点云。
通过密集匹配从影像数据抽取出大量的密集点云,并与近景影像生成的点云进行融合。以倾斜影像生成的密集点云为基准进行匹配融合,通过迭代最邻近点配准法(即ICP 算法)与人工配准结合的方法进行配准[15]。
密集匹配点云集为A={a1,a2,a3,…,an},林下影像点云集为B={b1,b2,b3,…,bn}。目标函数模型为:

式(1)中:旋转矩阵R平移矩阵T是两点云数据之间的旋转参数和平移参数。利用最小二乘法求解最优解,求得目标函数最小时的R和T,从而得到高精度的融合点云模型。再利用融合点云模型构建TIN 模型。TIN 用于表达地物的几何结构[16],需要赋予其原始影像中的纹理信息,TIN模型与影像共同组成三维实景模型。通过空三加密实现影像像元与实际空间位置的一一对应关系,从而使三角网中的每个三角面片可以优选出最佳的纹理[17]。
1.3.3 林区高精路网地图构建方法
利用湖南中图通测绘地理信息有限公司基于AutoCAD 平台开发的三维测绘系统PSG 3D 构建林区高精路网地图,PSG 3D 三维测绘系统集成了三维数据浏览、坐标投影转换、倾斜模型精度分析、多模式立体测绘、在线三维谷歌地形影像浏览、三维漫游、二三维联动查图、KML 文件导入、自定义地理信息编码命令、三维测图痕迹点、线显示、批量生成高程数据等专业测绘功能。基于PSG 3D三维测绘系统构建高精路网地图的流程如下:
1)首先在此三维测绘系统中加载构建林区精细三维实景模型;
2)在林区精细三维实景模型上绘制道路边线、中线等道路附属设施;
3)在植被和建筑物影像采集时,可以对模型进行切割显示,切割后可以清晰的绘制道路,进而构建出林区高精路网地图。
2 结果与分析
2.1 林区精细三维实景模型
基于上述林区三维模型构建方法,利用Context Capture 三维建模软件生成林冠上下高密度点云数据如图4~5所示。
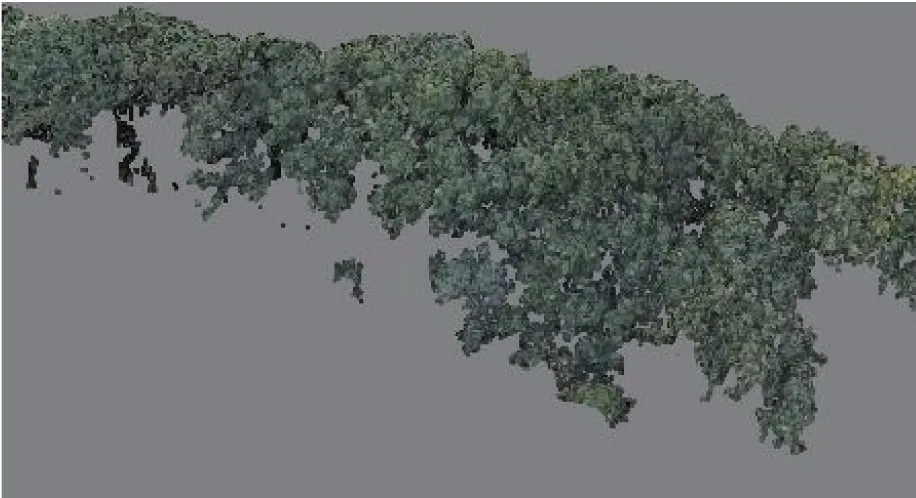
图4 倾斜影像生成密集点云Fig.4 Dense point clouds generation from tilted images

图5 近景影像生成密集点云Fig.5 Close up images generate dense point clouds
利用ICP 算法与人工配准结合的方法将两种点云进行配准融合得到的点云融合模型如图6所示。
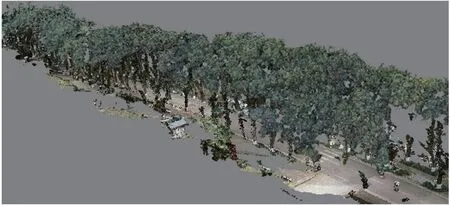
图6 配准融合后的三维点云Fig.6 Aligned fused 3D point clouds
利用大量的点云融合数据构建较为精细的三角网TIN 结构模型,根据影像与构建三角网TIN模型之间的每一个三角面片的几何对应关系,选择最佳的纹理图像进行配准,通过纹理映射技术贴合纹理结构信息,最后输出林区精细三维实景模型如图7所示,相比单纯无人机倾斜摄影建模,有效解决林区道路模型漏洞和模糊不清等问题。从图7中可以清晰的看到道路中心线、边线、路沿等道路信息,为林区高精地图构建提供了可能。

图7 孟公山林场三维实景模型Fig.7 Three-dimensional model of Menggongshan forest farm
2.2 孟公山林场高精路网地图构建
高精路网地图与普通路网地图相比,具有精度高、特征、属性更丰富的特点。高精度是指路网绝对坐标精度达到了亚米级,道路交通信息元素和属性更加丰富和详细。高精路网地图与普通导航电子地图相比,不仅具有精确的坐标,还可以对道路形状、车道线、车道中心线和交通标志等信息进行精确描绘。基于上述路网地图构建方法,构建的路网地图见图8,部分截图如图9所示。
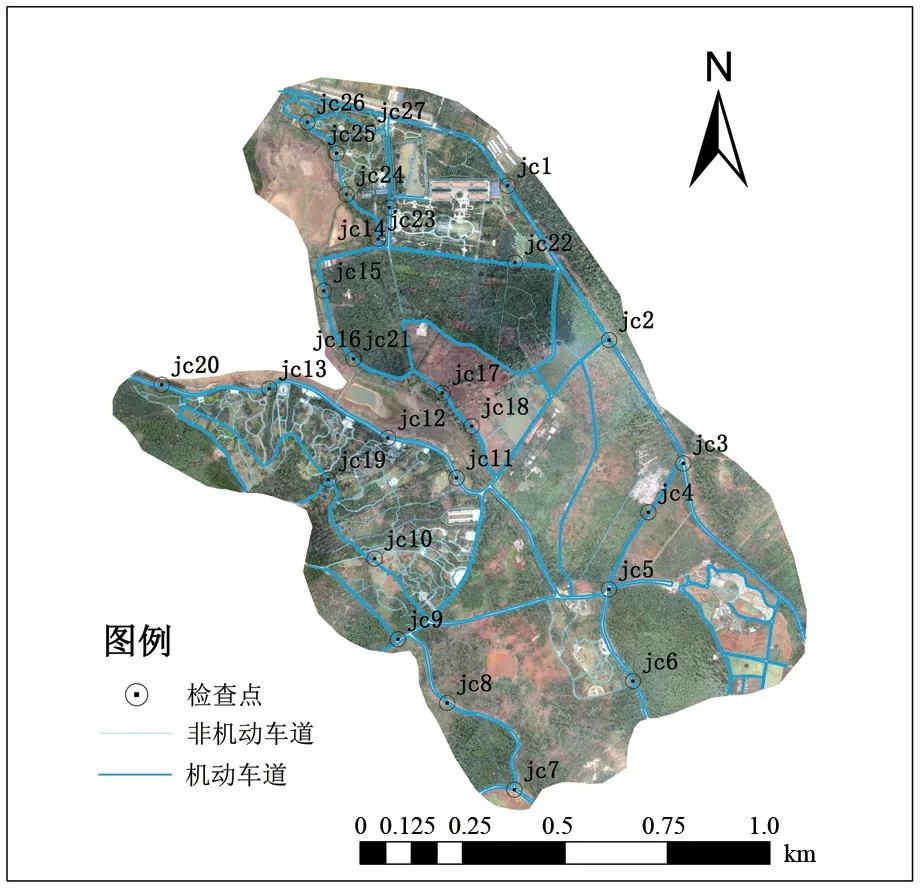
图8 林区高精路网地图Fig.8 Forest area high precision road network

图9 林区高精路网地图部分示例图Fig.9 Some example maps of high precision road network in forest area
如图10所示,从西至东正向行驶(按箭头方向)的车道的中心线上选取20 个坐标点来计算此路段车道的航向(正北方向与路段的正向顺时针的角度)、坡度、曲率关键路网信息。
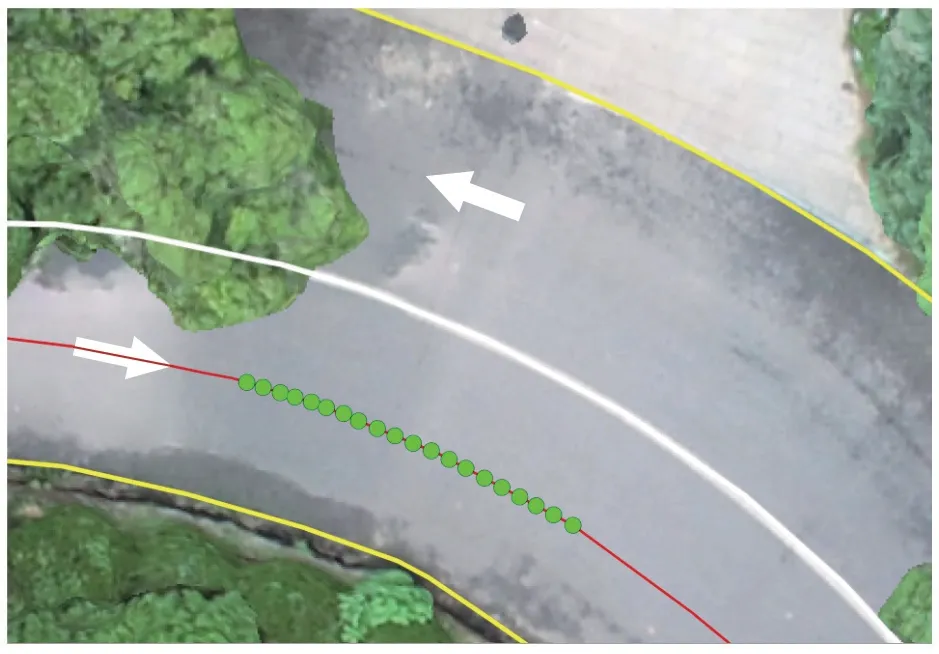
图10 航向、坡度、曲率路网选取点示意图Fig.10 Schematic diagram of selected points for heading,slope,and curvature of the road network
林区路网的三维数据可依据道路的坐标点直接计算所得,如图11所示,已知路网上的三点,按前进方向依次为P1(X1,Y1,Z1)、P2(X2,Y2,Z2)、P3(X3,Y3,Z3),则P2点处的航向(H)、坡度(S)和曲率分别为:
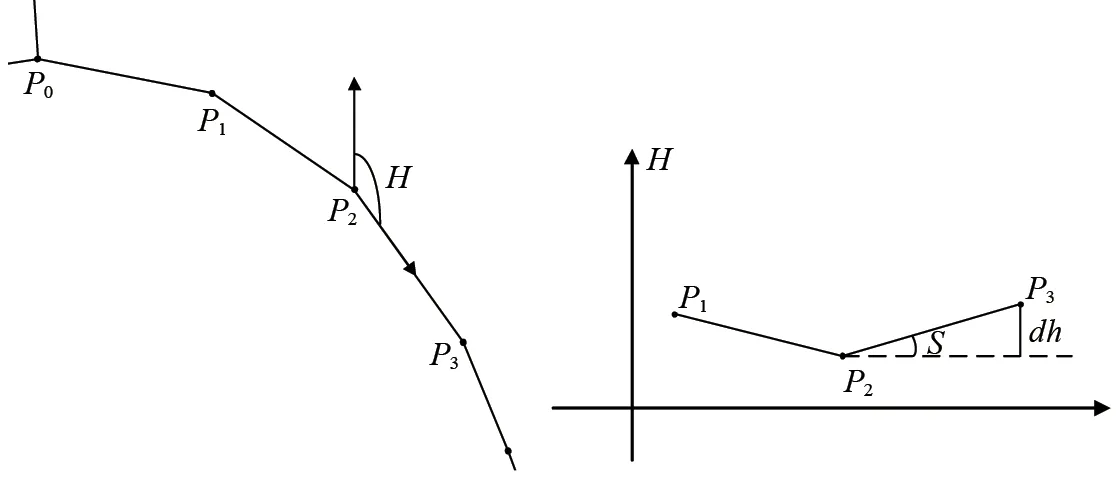
图11 航向坡度计算示意图Fig.11 Schematic diagram of heading slope calculation

曲率是曲率半径的倒数,曲率半径则可依据当前点和前、后特征点用三点做圆的方式求得。圆的标准方程式为:

将P1、P2、P3三点的坐标代人该式,组成联立方程组,求解得到r即可。根据公式(2)~(4)计算所得航向、坡度、曲率,如表1所示。
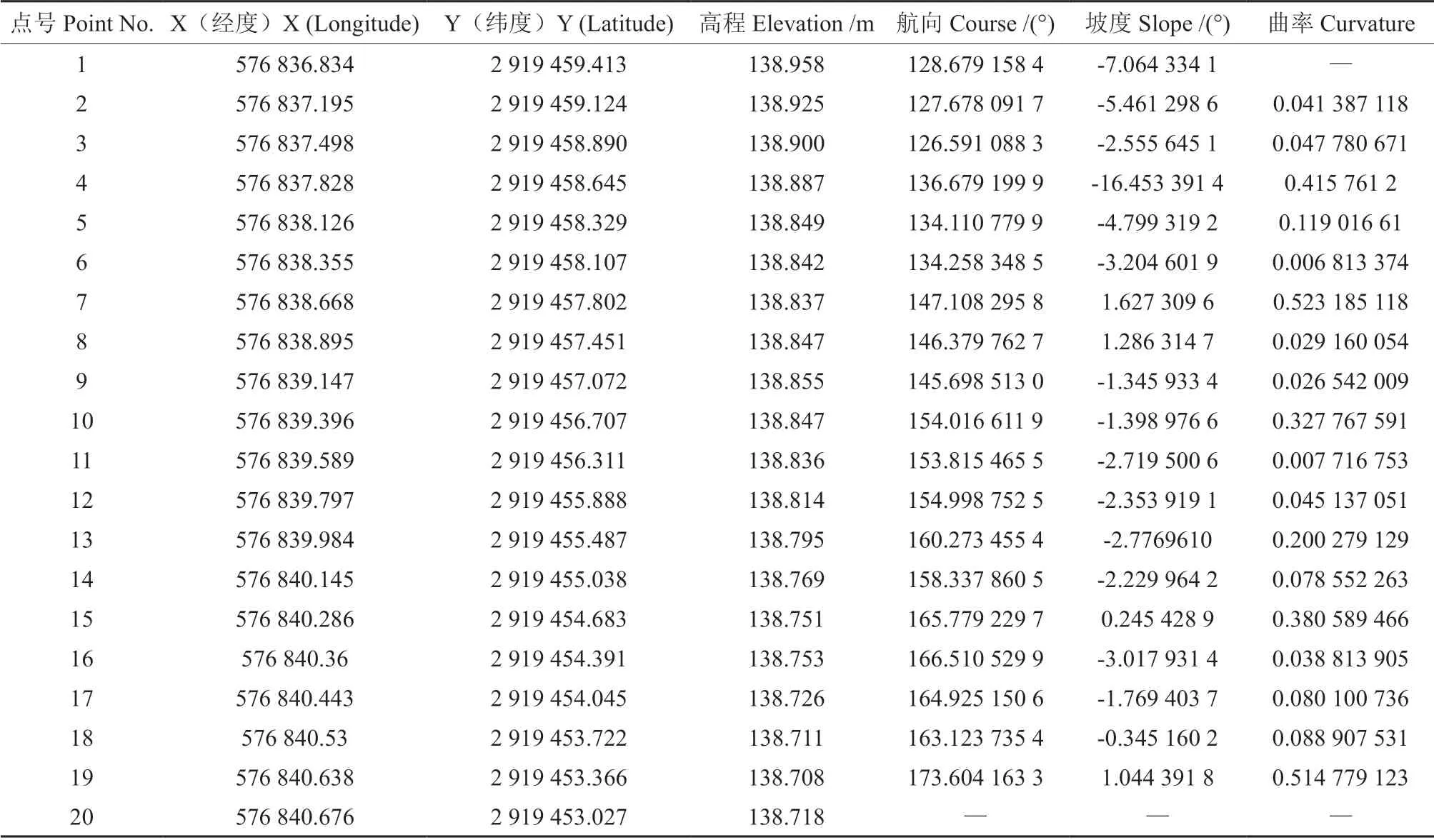
表1 航向、坡度、曲率列表Table 1 List of heading,slope and curvature
通过车道中心线上的点信息,可以获取车道的主要信息,如表2所示。
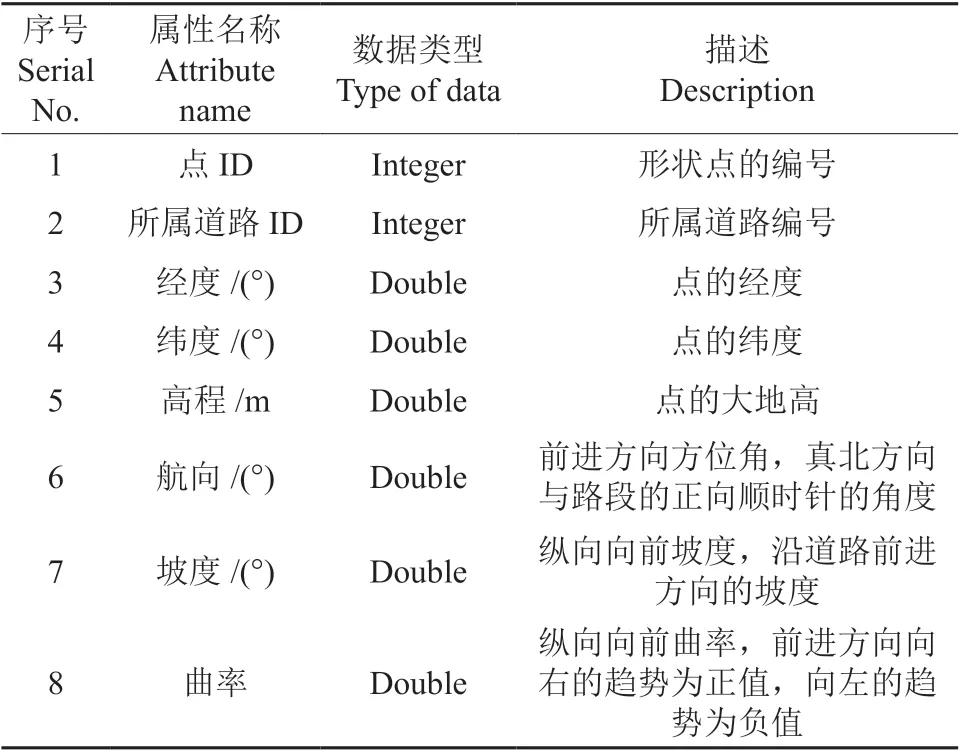
表2 车道中心线形状点数据表Table 2 Lane centerline shape point data table
林区道路有比较规范的行车道,也有林间小路等各种道路,如表3所示。
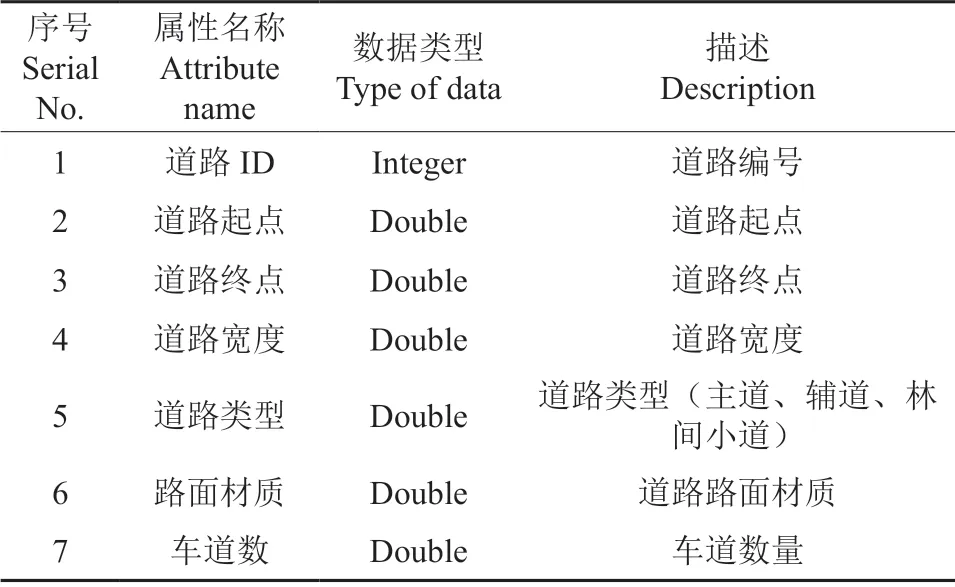
表3 道路信息Table 3 Road information
2.3 林区高精路网地图精度评价
为了验证林区路网的精度,在实验区域中布置了27 个检验点(如道路中心线上、边线等明显标志处)。检验点的详细分布情况如图12所示。
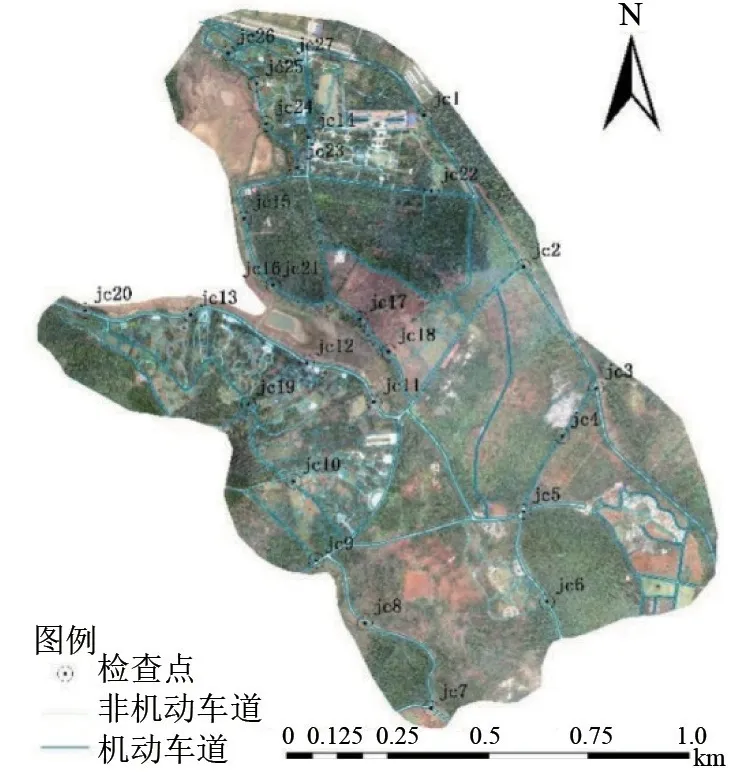
图12 检验点分布图Fig.12 Checkpoint distribution
把GPS-RTK 实时采集检验点的三维坐标作为真值,并在相对应的建立好的林区高精路网地图上利用量测工具得到实际坐标,统计两者之间的差值,如表4所示。进而计算平面中误差及高程中误差,如表5所示,依此评价林区高精路网地图的精度。
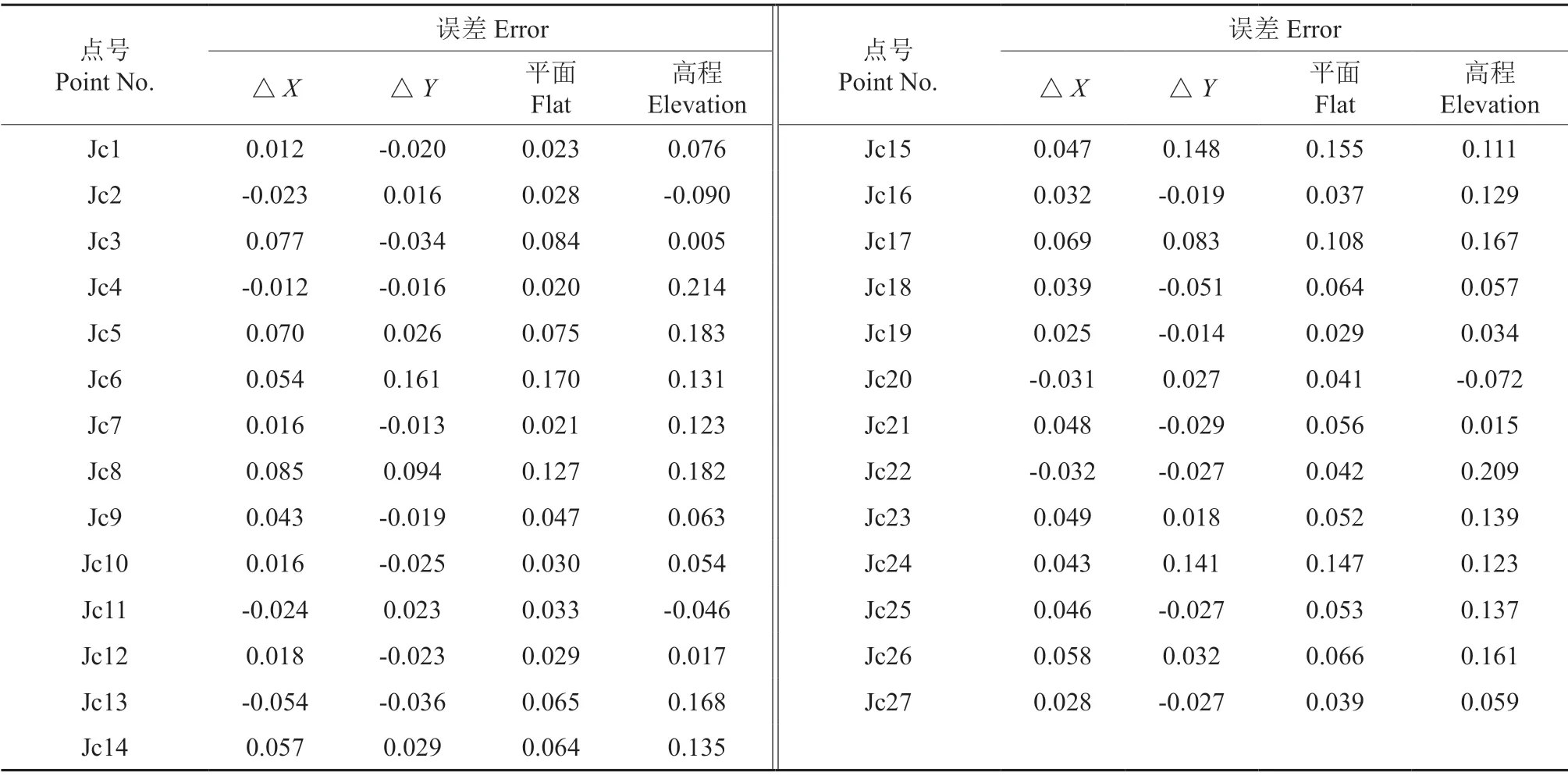
表4 检验点坐标真值与图上实际坐标的差值Table 4 The difference between the true value of the coordinate of the inspection point and the actual coordinate on the map m
从表5计算的数据中可以看出:基于上述方法构建的高精路网地图,实际点位与地图上点位平面中误差为0.076 m,高程中误差为0.122 m;平面的最大误差为0.170 m,高程最大误差为0.214 m;平面的最小误差为0.020 m,高程最小误差为0.005 m。显然,符合高精地图误差小于20 cm 的标准。
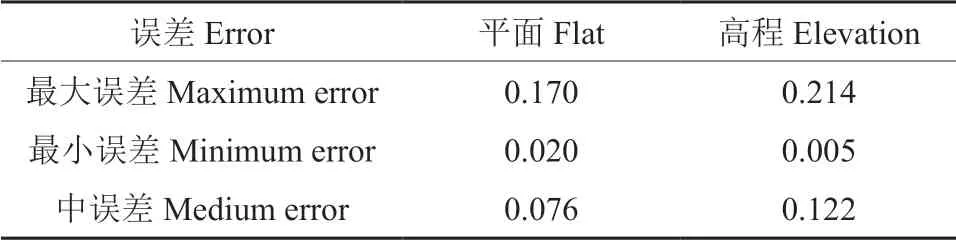
表5 检验点精度计算统计Table 5 Statistics of Inspection Point Accuracy Calculation m
3 结论与讨论
3.1 结 论
1)采用“无人机倾斜摄影测量结合近景摄影测量+精细三维实景模型构建+人机交互式构建林区高精路网地图”的模式,构建了孟公山林场高精路网地图。该地图涵盖的实际面积约为1.4 km2,全流程构建时间少于10 个工作日,综合误差低于20 cm,实现了低成本、高效率、高精度构建小范围高精地图的目的。
2)无人机倾斜摄影系统从不同视角采集多视影像,获取地物顶部及侧视的高分辨率纹理信息,构建的三维模型感官真实性强。但无法获取林冠下的林区道路信息,不能保证道路模型的完整性。近景摄影测量技术虽然无法获取完整的道路信息,但可以完整准确地获取林冠遮挡下的道路信息。结合两种技术,实现了优势互补,降低了林区精细三维实景模型的构建成本,提高了高精路网地图构建的效率和精度。
3)利用ICP 算法对两种点云进行配准融合所构建的三维路网模型轮廓清晰,近地面物体结构清楚,表面特征直观反应了物体的真实结构状态,有效地解决了模型漏洞和模糊不清等问题,极大地优化了模型效果。
3.2 讨 论
1)本研究进行林上林下点云数据的融合构建出林区三维实景模型,点云数据有冗余,影像林区精细三维实景模型构建的效率,进而影响林区高精路网地图构建。今后的主要研究工作应放在基于林区三维点云模型自动提取出道路边线、交通标线、指示标志等道路信息的点云,以及林区高精路网地图的质量控制与应用发布方面上。
2)高精地图一直是自动驾驶领域的研究热点。林场、森林旅游区、植物园等小范围特定区域,往往被“忽略”。它们拥有完善的基础设置、规范的路网、相对封闭的环境、稳定的人流,这些条件为通勤、游览、清扫、安保等自动驾驶车辆提供了绝佳的示范区域和应用场景。随着自动驾驶的普及,自动驾驶在林区的应用将大有作为,促进林区、森林旅游区智能化可持续发展。
