一种预防重载车辆侧翻的在线监测预警系统设计
2021-12-27郝晓曦黄健斌许尧兴
郝晓曦,陈 胡,陈 军,黄健斌,许尧兴
(五邑大学 智能制造学部,江门 529020)
0 引言
车辆侧翻是指车辆在行驶时,发生绕纵轴转动90°或者更大角度,车体与路面相触碰[1]。大型车辆如重型泥头车、重型翻斗车等,由于车辆结构存在质心高、结构和质量大等特点,在大半径转弯和躲避障碍物等极限工况时,极易发生侧翻事故,即为车辆曲线行驶引起的非绊倒型侧翻[2]。如何在不改变车辆原有结构的基础上,预防该类型的侧翻事故发生,已成为各类交通运输行业关注的热点问题。
二十世纪末,Dunwoody等人率先提出了横向载荷转移率(LTR)的预警方式,该预警系统通过耦合在车辆的传感器件组,检测车辆横向转移负荷信号和横向加速度信号,并由力矩计算器计算出基于传感器组件信号的滚动力矩,为交通工具提供一种可能性侧翻指示计[3]。以H.Imine为代表的研究人员,利用高阶滑动估计模式观测器估计车辆横向极限加速度和重心高度,希望以此提高控制算法的的精度[4]。2013年,Chad Larish等人在传统的LTR算法基础上,考虑到车子的侧向加速度和转向模式,提出了一种可以预测横向载荷转移率的算法,以此标定侧翻指标的门槛值[5]。一直以来,为提高预警精度和实时性,研究者们不断地提出改进预防侧翻算法,因此这种侧翻预警方法在理论上已经较为成熟。然而,在实践中,面对复杂的干扰状况,仍需进一步考虑各类环境对预警检测效果的影响。本文旨在通过实物仿真建立车辆在行驶过程中各主要动态性能参数与横向载荷转移率之间的关系,并优化LTR理论中各种边界条件和假设,进而更准确的判断车辆在行驶过程中的姿态。
1 侧翻预警系统设计
1.1 预警系统门限值确定
在侧翻控制理论的研究中,车辆发生侧翻时,路面对左、右车轮的支反力为零。根据式(1)知,LTR区间大小为(0,1),当值为0时,表示左、右车轮受到地面支反力相同,车辆在平稳状态行驶。当取值为1时,表示某侧车轮支反力值为0,车轮与地面分离,车辆处于侧翻状态。通常,不会将门限值取在车辆已经侧翻状态,具体门限值指标,根据系统稳定情况,在(0,1)范围内合理判断。

目前,研究车辆侧翻主要从刚性车辆模型和非刚性车辆模型出发。在刚性车辆模型的表达式中,可以明显反应出加速度、质心、轮距三者关系,但由于忽视了轮胎、悬架等结构参数,使得推导方式简单,计算阈值整体偏大。不能准确反应车辆运行时状态。对于非刚性车辆侧翻模型研究,一般以三自由度和多自由度为研究对象,考虑了悬架弹簧刚度、悬架阻尼和轮胎侧偏力等影响因素,客观地造成了模型复杂,加大了对硬件条件的限值。
因此,本文在构建车辆侧翻模型时,选取非刚性车辆模型为研究对象,忽视了轮胎动力学特性、前后轴不对称性,假设在正常水平路面行驶,而不考虑其他意外状况,并将弹簧结构线性化作为整车内部受力点,以簧载质量变化作为其中一个主要输入对象,进而探究各种主要动态特性参数与横向载荷转移率之间的关系。具体模型动力学分析如下文所述:
如图1所示,车辆在左转弯时的力学模型(后轮截面)。
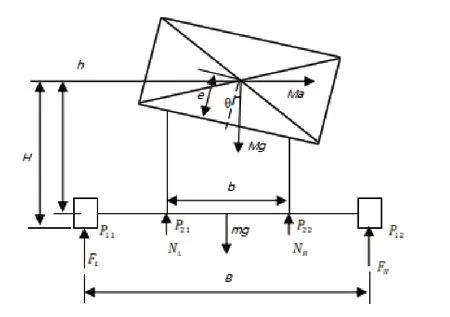
图1 车辆左转弯力学模型(后轮)
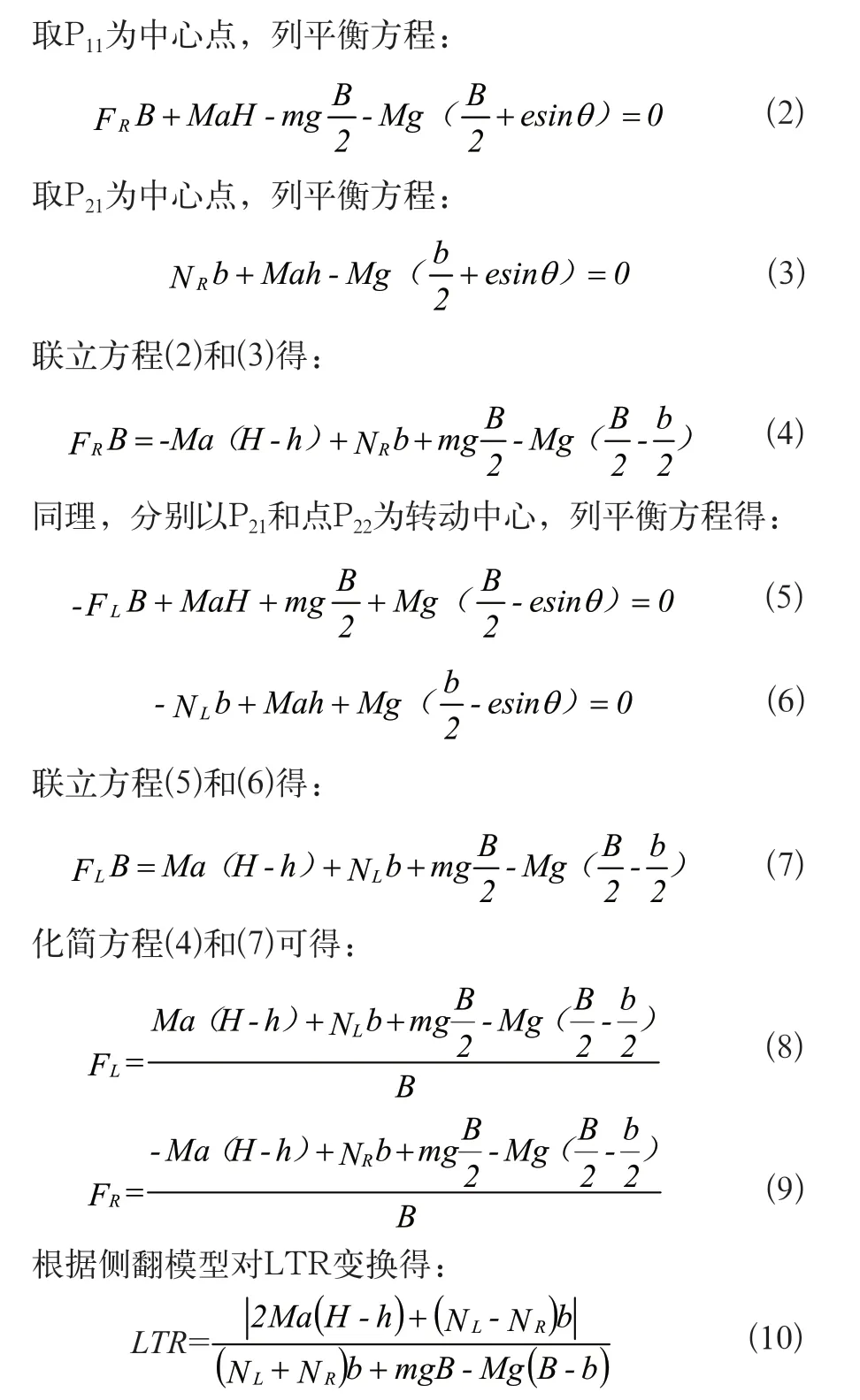
由式(10)分析,可知这里在侧翻准静态模型的基础上,考虑了侧倾平面的加速度和悬架的柔顺性,相比较传统的刚性车辆模型,考虑增加了车体自身结构参数,同时,简化了悬架的刚度和阻尼。以此,验证车辆姿态变化与LTR的关系。
式中:
FL、FR为地面分别对应左后轮支反力
M为装载质量
H为装载质量重心至地面的高度
h为装载重心至轮轴中心的距离
a为横向加速度
m为空载时车身分布于后轴的质量
B为后左右车轮与地面接触中心距
b为簧距
g为重力加速度
具体一些有关模型的参数现已列出,如表1所示:
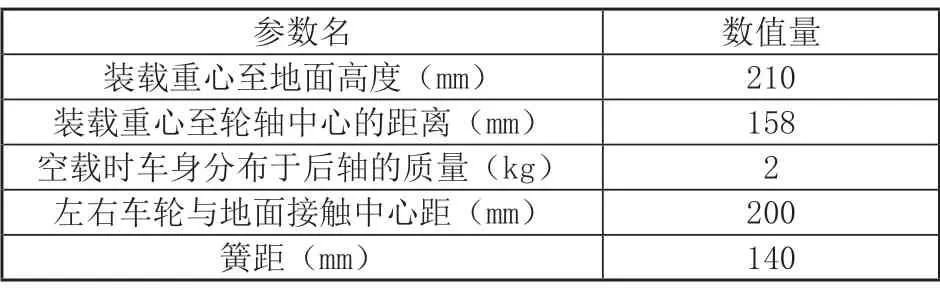
表1 模型中已知参数
1.2 预警系统总体结构方案
车辆侧翻在线监测系统主要分为上位机硬件和下位机硬件两部分。系统设计框图如图2所示,该系统是在小车运动状态下,下位机对加速度、速度传感器和左、右位移传感器的信号采集,做先期信号处理。再利用无线通信模块,将处理后的数据经串口传递给上位机,利用Labview软件对串口传递过来的数据实时显示、存储和回放。
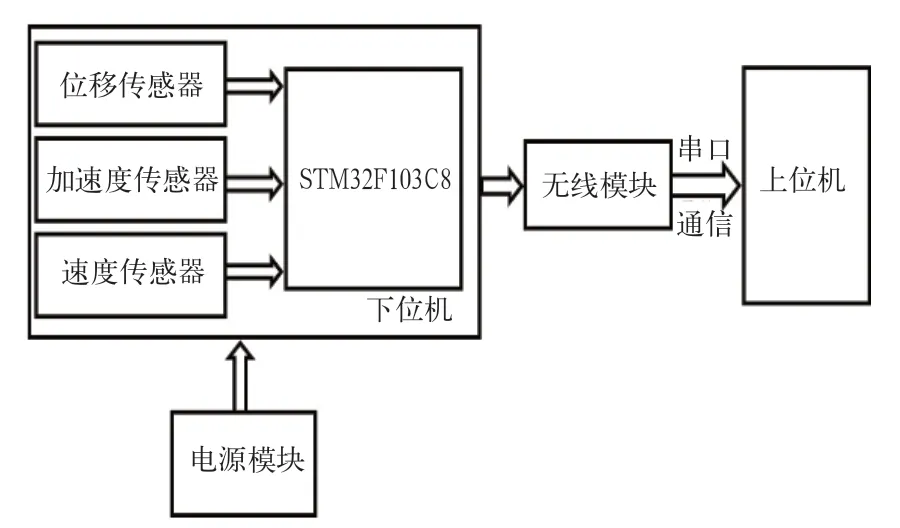
图2 系统设计框图
1)位移传感器
本实验选取HG-C1100作为测量实际位移偏差的激光位移传感器[6]传感器与被测物体定位点在100mm处,量程为65mm~135mm,中心光点半径为6mm,重复精度70μm。利用标定好的弹簧系数Ks,再通过检测簧载的微小变化量Δs,由下式得出簧载受到的力F:

2)速度传感器
选取常用的光电编码测速传感器测量车子在行驶过程中的速度,该传感器线数100线,内外直径分别是3.5mm、22mm。对管中包含两根信号线,输出为脉冲波,电源电压5V。通过多次实际测量,电机转动一周,行程公式为(C/100)*(14/57)*104*πmm。
3)加速度传感器
选取六轴运行陀螺仪传感器作为测量加速度,传感芯片采用MPU6065,电压范围在3.3V~5V。方便嵌入式开发连接。该传感器内部用卡尔曼动态滤波算法写入,在动力学求解方面可以做到快速求解,解决了系统延迟性问题。结合微处理器快速运算的特点,可以提高精度,降低写入噪声。在串口传输方面,可以通过串口电平TTL、串口总线232两种传输方式。为用户提供了多种选
2 侧翻预警系统软件设计
系统软件流程图如图3所示。首先进行初始化参数,上位机部分通过在Labview前面板设定好车辆相关参数,并调好与下位机沟通的通信参数,做好初始参数设置准备,下位机采集程序将传感器模块收集到的信号降噪、滤波。然后,发送给微处理单元,进行信息处理,将处理后的结果和各传感器转换的数字量信号,通过无线模块传递给上位机[7]。上位机接收上传数据,在通过编写的程序框图中进行内部程序处理,将处理后的结果实时显示在前面板中。并保存在指定的文件夹中,为后期数据处理分析提供数据。
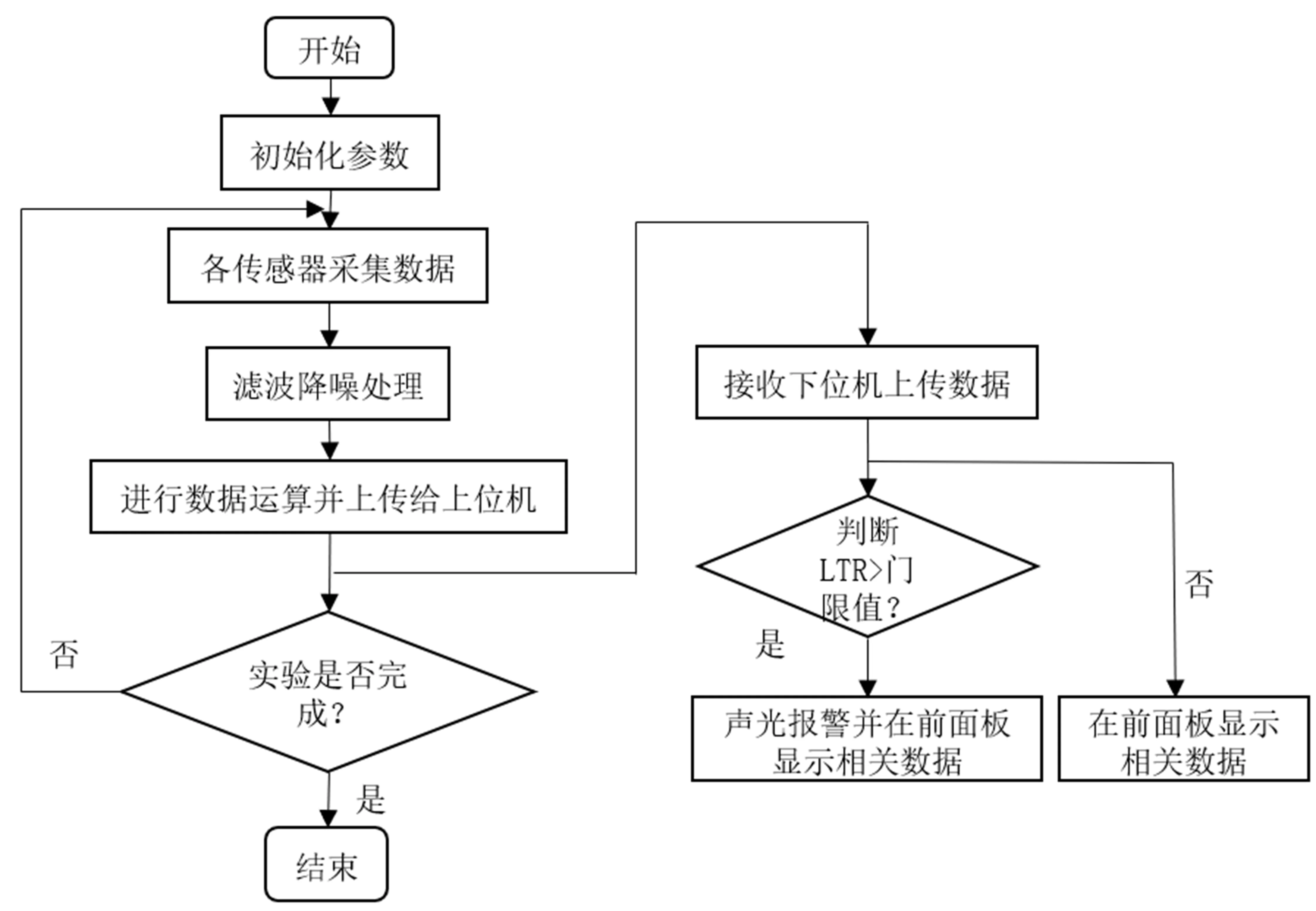
图3 软件流程图
3 侧翻预警监控平台设计
3.1 前面板设计
车辆侧翻在线监测系统的前面板如图4所示。分别有串口连接区、计数区、数据输入区、数据清除区、图表显示区。串口连接区用来配置好参数,沟通Labview和stm32的连接,计数区实时显示stm32传来的数据总数和单次传送数据的数目以及共传送数据的次数。数据输入区用来标定车体数据输入参数。图表显示区用来显示处理后的各参数数据。
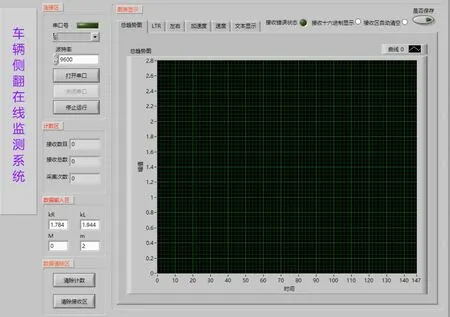
图4 前面板界面
3.2 程序框图设计
Labview程序框图如图6示,主要由数据读取模块、数据检索模块、数据处理模块和数据保存模块组成[8]。
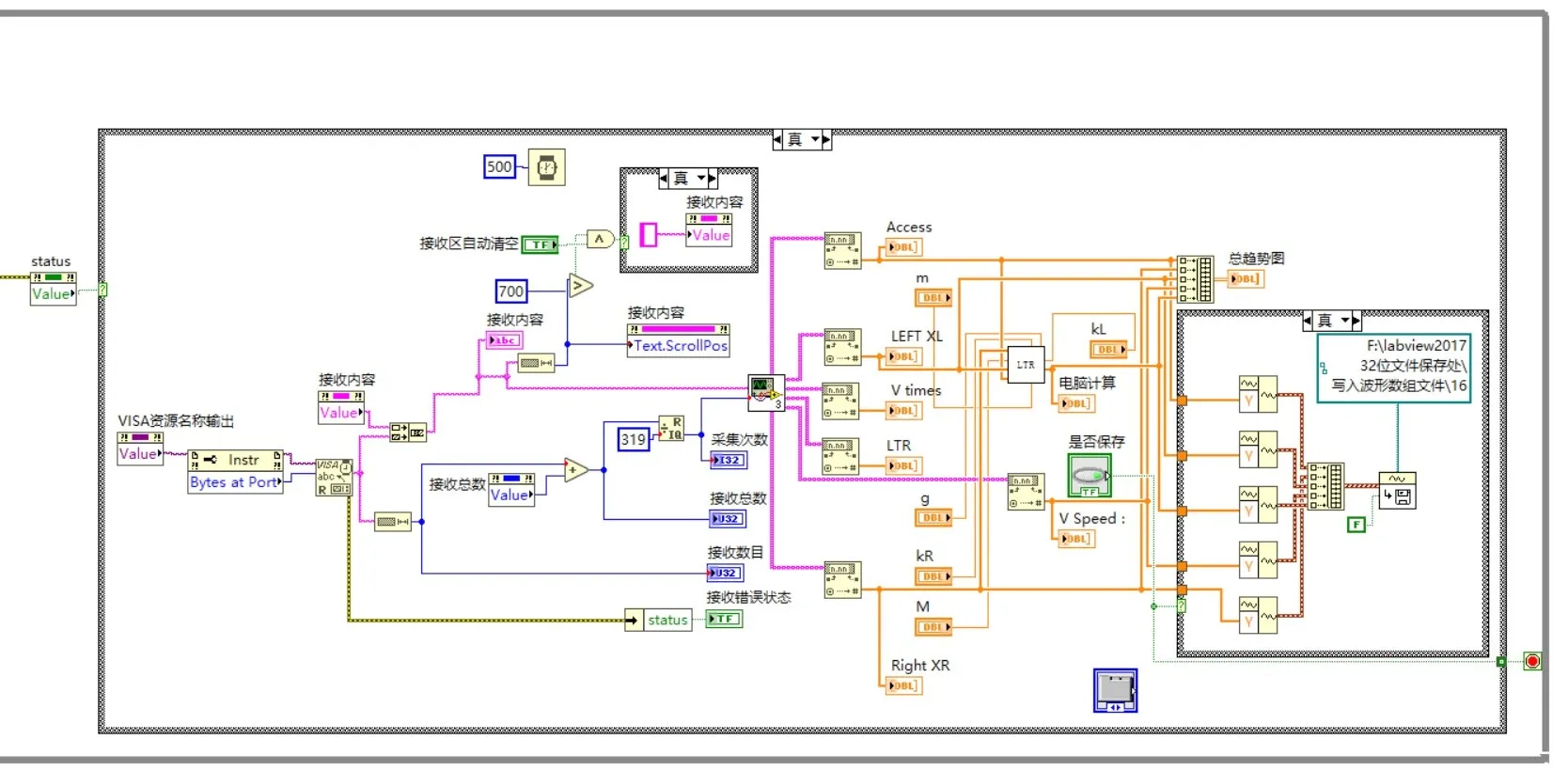
图6 Labview主程序框图
数据读取模块利用VISA模块里的函数对stm32串口信息进行配置、缓存、读取和关闭[9]。该模块在编写时,利用属性节点,设置停止再启动时数据自动清零和防止误操作功能,具体内容如图5所示。数据检索模块检索单片机处理后的数据内容。数据处理模块利用字符串至数值函数,将检索出来的字符串数据转换成数值数据。数据保存模块的任务是将实时采集得来的数据保存,这里将数据转换为波形数据,并通过写入波形至文件保存,在数据保存命令按下的同时,程序自动停止运行。将保存的数据存入安排好的文件路径中,后续的工作是把采集得来的数据,进行数据回放分析。为突出模块化设计,将各模块单独编写为子VI的模式,方便日后维护。
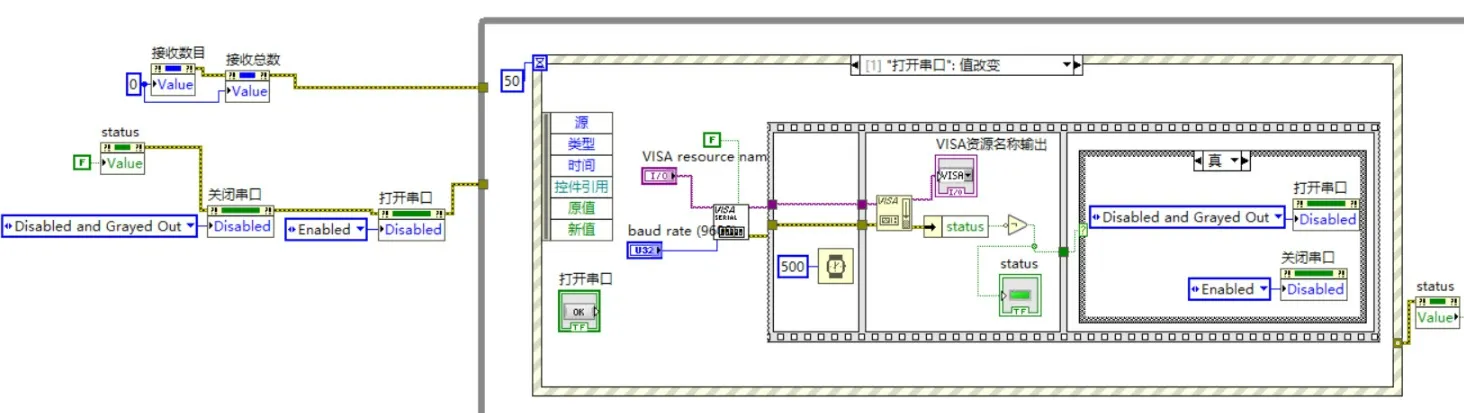
图5 串口数据采集
4 系统测试
为探究车速、侧向加速度、簧载位移和横向载荷转移率的关系,将系统测试分为静载荷测试和动载荷测试两种方案。
首先,进行静载荷实验,目的是验证搭建平台的可行性,及硬件电路的是否正常连接。将车辆模拟平台上电运行,待工作平稳后,打开由Labview软件开发的大型重载车辆侧翻在线监测系统进行在线监测,采集到一定的数据点后。利用编写的数据处理程序对采集的数据进行离线分析。在静载实验下,左、右两处簧载位移下降值分别约为7.4mm和4.62mm,车速约为为0.72m/s,LTR值近似为0,车辆处于平稳运行状态,同时,将Labview采集到的左、右位移传感器值与传感器本身实时数值做进一步分析。如表2所示。通过分析表2中数据,可以发现测试平台采集得到的数据与实时数据的误差均在5%范围内,属于合理范围之内,因此,可以确定所搭建的测试平台,符合设计需要。

表2 静载荷试验下左、右位移传感器相对误差
动载荷测试为模拟车辆做曲线运动时,进行的测试方案。选取干燥的沥青路面作为测试条件,摩擦系数为0.75,保持车速约为0.72m/s。在动载荷下采集数据,如图7所示。在图7(a)中,明显发现左右位移出现较大变化,在采集次数为300至400间,车辆有侧倾迹象。选取通道,放大LTR值,如图7(b)所示,LTR值在该区间也存在明显波动,峰值在0.85处,未达到1。经过分析发现,建立的模型平台与实车参数结构存在一定差别,建立的数学模型未考虑车辆悬架的非线性及轮胎等参数对车体的影响。可以通过控制对侧翻阈值的取值范围,进行预警判断。综上分析,该系统能够检测小车模拟平台的运动状态,对应的变化曲线在一定程度上反应出侧翻姿态和LTR的相互关系,也从侧面验证侧翻模型具有一定的可靠性。为以后改进方案设计提供一定的数据支撑。
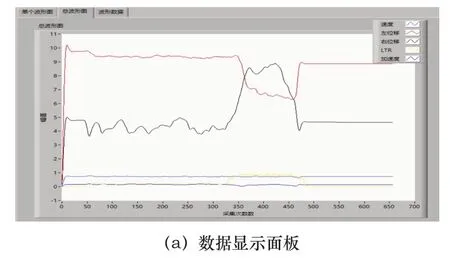
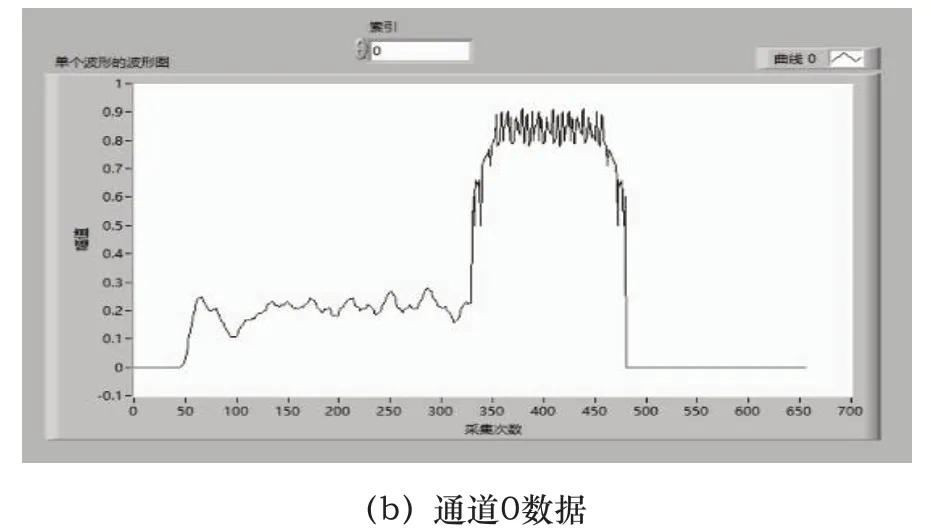
图7 动态载荷采集数据前面板
5 结语
本文借助Labview软件开发了用于车辆侧翻在线监测系统,该系统利用各模块相互配合,完成对数据读取、显示、保存和回放的操作。实现了对车辆行驶过程中各参数实时监测。同时,stm32单片机和NRF24L01的搭配,可以高效、稳定地将采集的数据传送给Labview平台,解决了有线连接造成的实验操作不易问题。利用Labview良好的人机交互和较高的可视化功能,实现对数据的采集、处理和分析,为实验者提供了一定具有参考性实验数据。
