星载大型天线平面度智能移动摄影测量技术研究
2021-12-27蔡子慧韩建超于望竹杜兴华
蔡子慧,韩建超,于望竹,杜兴华,李 云
(北京卫星制造厂有限公司,北京 100094)
0 引言
大型SAR天线是高分辨率对地观测卫星的重要遥感成像的关键载荷,该天线具有全天时、全天候、高分辨率、大幅宽地穿透成像监测能力[1],卫星快速重访、宽幅覆盖以及地面动目标检测等多种新功能的需求对SAR天线的面积和型面精度提出了更大、更精的要求。如图1所示,大型SAR天线属于大型空间可展开机构,外形为长方形板式结构,展开时外挂在星体两侧,天线平面度是保证卫星在轨高精度遥感成像的重要指标、影响卫星在轨功能运行的成败,为了验证其在轨状态下的展开性能和稳定性,需要进行多次展开试验并测量翼面平面度的稳定性,从而确保SAR天线在轨稳定、可靠。
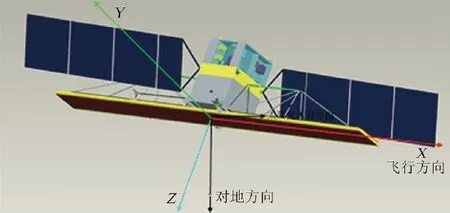
图1 大型平面展开天线
以往采取人工手动摄影拍照测量的方式,检测效率低,检测结果受测量人员经验影响较大,因此为了提高大尺寸天线平面度测量的效率和数据一致性,降低人为影响,提出了一种智能移动摄影测量的方法,并开发了智能移动摄影测量系统,通过预先规划的移动路径,利用中央控制软件控制移动摄影测量系统按规划路径对大型天线进行测量,实现了大尺寸天线平面度的全空间智能柔性移动、高效自动化测量。
1 智能移动摄影测量系统总体构成
智能移动摄影测量系统是以高精度工业摄影测量相机作为末端测量数据采集传感器,通过与全向移动升降机构集成而成的一套自主、导航移动的自动化测量系统,该系统的总体结构如图2所示,该测量系统主要包括:工业摄影测量相机、自动旋转云台、自动升降导轨、AGV全向移动车、相机同步控制器、测量控制软件等单元构成。

图2 智能移动摄影测量系统总体组成
智能移动摄影测量系统工作时由中央一体机统一发送各构成单元的执行指令,从而控制相机采集数据、AGV视觉导航移动、云台旋转等各单元工作,其数据通信框架如图3所示,一体机分别于相机和AGV小车通讯连接,一体机与云台,AGV小车分别用RS232类型数据线进行连接,使得设备相互之间的通讯交互,一体机除了为相机供电外,还接收相机传输的信息,接收信息接口有USB3.0和HDMI接口,USB3.0接口负责传输相机拍摄实时影像,HDMI接口负责在一体机屏幕上显示实时拍摄影像。

图3 系统通讯控制一体机及数据交互框架
一体机通电以后,通过触摸屏关闭正在运行的后台测量软件,运行AGV小车,按路径规划行走,起点位置时发送起点命令,每走到一个节点发送触发命令,相机接到命令后拍照,中点返回的位置发送终点信号,相机旋转切换姿势并拍照。并将触发信号通过串口发送到相机,相机收到触发后牌照,并反馈信息,相机图片采集后进行显示;路径结束后,一体机上安装的测量软件实时对测量数据进行处理,计算面板平面度。
2 三维空间坐标信息识别与获取
物体表面的点坐标信息主要通过智能移动摄影测量系统末端的相机传感器采集、识别和获取,相机精度为3um+3um/m,像素为2900万像素,视场角为72°×51°,该相机具有大视场、高分辨率的特点,如图4所示该系统在不同位置和方向对物体表进行数据采集,从而获得物体表面的图像信息,通过对获取的多幅数字图像,进行图像预处理、标志识别、图像匹配、空间三角交会及光束平差后[2],得到表面上目标点的空间三维坐标值。

图4 多站位数据采集原理图
如图5所示,物体表面的点P′经过像机镜头摄影后成像在像平面上,摄影镜头的光学中心为S(投影中心或摄影中心),物体表面点P′经过S投影到像平面上的像为p,这三点处于同一直线,即三点共线。

图5 目标点三维坐标获取获取
物体表面点的三维坐标解算,通过式(1)的共线方程解算可得:

式中,(x,y)为像点在像平面坐标系的坐标,f为相机焦距,(XS,YS,ZS)为像点在物方坐标系的坐标,a1,a2,a3;b1,b2,b3;c1,c2,c3为像平面坐标系和物方坐标之间的旋转矩阵系数,(X,Y,Z)为空间被测物点在物方坐标系下的坐标,计算得摄站位置物方仪器坐标系下的坐标值。
3 移动测量路径设计
影响大尺寸摄影测量的主要因素是交会角和图像重叠率,最佳交会角一般要求为90°,不同位置拍摄的图片重叠率需大于60%。在大型平面天线平面度测量过程中,由于大型SAR天线产品表面尺寸面积比较大,为了保证测量精度,需预先规划水平横向和竖值方向的移动路径,以最优的路径拍摄测量才能满足不同站位拍摄后具有较好的测量交会角[3]和重叠率。因此在设计移动路径需综合考虑精度和拍摄全覆盖,总体方案是水平横向移动时相机光线主轴以45°入射角进行拍摄,每个位置需将相机沿主轴旋转90°再拍摄一次以保证90°交会角,水平横向拍摄后再发送竖向移动拍摄的命令,以此方式对整个面板区域进行全覆盖100%图像拍摄、采集。
如图6所示,以某外形尺寸为9米×2米的大型天线为例,测量相机距离测量面板的距离设计为1.4米,相机参数视场角:72°×51°,按光轴入射光线45°,通过三角函数可计算得出相机的水平横向有效观测范围为2.2米,竖直纵向有效测量范围为1.2米。按照水平方向和竖直方向均采用60%重叠度的拍摄方式,则水平方向和竖直方向每次移动为水平和竖直视场的40%,通过三角关系,水平方向每拍摄一次移动距离为0.85米,每行拍摄完成之后,竖直方向移动距离为0.45米,按照天线长、短边的距离,最终规划了如图7所示的移动路径的轨迹,共72个AGV视觉定位导航停泊点。
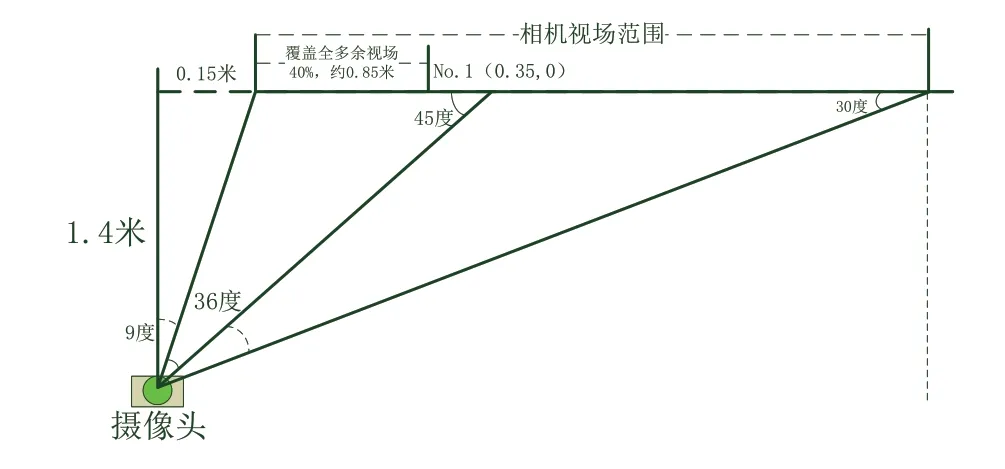
图6 第一种测量姿态下的水平移动测量范围

图7 第一种姿态拍摄路径
按图8的方法,以面板左上角为原点,面板长边水平横向移动方向定义为X轴,面板短边竖直纵向移动方向定义为Y轴,建立面板直角坐标系。为了保证每一处拍摄区域均有重复拍摄,需将初始位置向-X和-Y方向预设一个位置,相机主轴拍摄的第一个点的坐标为(-1,0.15),AGV小车水平移动范围为0.85×11=9.35米,垂直移动距离为0.45×5=2.25米,拍摄范围覆盖了整个天线面9米×2米的区域。

图8 移动距离坐标换算示意图
4 测量应用与系统重复性验证
根据上述方法,将该系统应用在了模型号大型SAR天线展开过程平面度测试中,该天线由两块面板装配而成,即内天线板和外天线板,整体外形尺寸为9米×2米,首先在天线表面贴上摄影测量专用的测量标志点,分别在天线3块板子中心位置放置1米的炭纤维标准尺,用于系统定长度和校验现场的系统精度,在天线前约1.4米处的地面上贴上智能移动摄影测量系统视觉引导的二维编码,然后将AGV小车移动到规划路径起始位置,调用上述方法生成的测量路径的程序文件,如图9所示,按照调入的程序可驱动智能移动摄影测量系统对9米×2米的天线表面进行自动采集。

图9 大型SAR天线平面度智能移动测量示意图
智能移动摄影测量系统对天线表面采集到的数字照片经标志识别、图像匹配及数学计算后,得到标识点三维坐标值,各点坐标结果如图10所示,将天线型面点组数据文件提取至测量分析软件中,按照最小二乘算法进行拟合计算平面度,自动获得天线平面度测量结果。
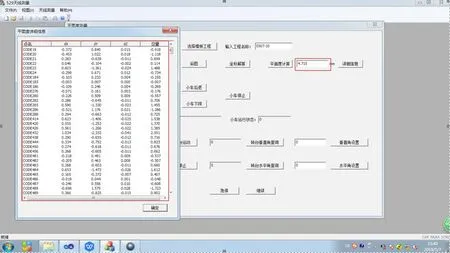
图10 平面度计算结果示意图
通过观察列评价测量不确定度的方法有两种,极差法和贝塞尔法[4],当测量次数n<10时,极差法优于贝塞尔法,当测量次数n≥10时,贝塞尔法优于极差法。
评价测量结果的重复性时,可选用标准偏差作为评价指标,具体至本文测量,因样本数量为n=5,适用极差法计算标准偏差。
极差法评定过程中,认为等精度多次测量测得值X1、X2、……Xn,服从正态分布,在其中选取最大值Xmax与最小值Xmin,两者之差为极差。标准偏差即σ=(Xmax-Xmin)/d,当标本数n=5时,由查表可知表1中的极差系数d=2.33。重复精度取3σ

表1 极差系数及自由度表
此次试验,在天线5次展开过程中,利用智能移动摄影测量系统该对天线平面度进行了5次等精度测量,各次平面度测量结果如表2数据所示,通过上述方法计算得出了5次测量的平面度重复性精度,高效、可靠的验证了大型天线展开过程的尺寸稳定性。

表2 某大型平面展开天线双翼平面度测量结果
5 结语
智能移动摄影测量系统在大型可展开平面SAR天线中的应用,攻克了摄影测量系统路径自动规划[5]的关键技术,使其具备全向移动、自动升降、多站位、多角度的数据自动采集功能,实现了对大型天线整翼平面度以智能高效移动的方式进行自动测量,并一键自动生成数值结果和偏差云图,从而降低了对测量人员经验和状态的依赖,确保了测试数据的一致性,经某型号天线的实际应用验证,检测效率由3小时缩短到30分钟,天线平面度测量精度优于1.5mm,解决了大型平面天线的面积大、精度高、人工测量效率低的难题,具有全空间智能柔性移动的特点,其高效的自动化测量优势亦可推广应用在其他领域大型、超大型装备产品的测量中。
