基于激光SLAM技术的电力巡检机器人交互控制
2021-12-27马占海肖建斌唐永成
马占海,肖建斌,唐永成
(华能新疆吉木萨尔发电有限公司,新疆 昌吉 831799)
0 引言
随着智能电网的发展,世界各国都开始在电力系统中利用决策支持系统、传感器技术和控制方法等方法保障电网的正常运行,通过开发智能化设备提高电网的智能化、环保化和信息化水平[1]。在电网系统中,变电站属于核心部分,其运行的稳定性和安全性直接会对人们正常生活和工业生产产生影响。目前,一些变电站将红外视频监控系统设置在电力系统中采集电力数据,根据获取的数据对变电站设备的运行情况进行远程监控和诊断,在变电站运行过程中通常设置专业人员对设备的运行状况进行巡检[2],但这种方法存在一些无法避免的问题,如难度高、漏检率高和危险系数高等。为了解决上述问题,人们开始利用巡检机器人代替人工进行电力巡检工作,在此背景下对电力巡检机器人交互控制方法进行分析具有重要的现实意义。
吴厚波等[3]对机器人普通行为之间存在的关系进行分析,构建基本机器人行为库,并结合双参数P控制方法和激光传感器完成巡检机器人的路径规划和避障控制,该方法无法获得巡检环境信息,规划后的路径较长,存在路径规划效果差的问题。彭盖伦等[4]通过Faster R-CNN检测方法对图像进行检测,获得巡检机器人运动方向,并对机器人中心坐标误差进行计算,在模糊PID控制器中输入误差计算结果,对巡检机器人参数进行调节,完成巡检机器人的交互控制,该方法没有构建机器人的巡检地图,导致方法的避障效果差,控制精度低。
为了解决上述方法中存在的问题,本文提出基于激光SLAM技术的电力巡检机器人交互控制方法。
1 SLAM模型
1.1 地图模型

1.2 运动学模型
运动学模型包含很多种,本文选用二轮三自由度机器人模型作为电力巡检机器人运动学模型[7-8],巡检机器人的运动状态方程p(sk|sk-1,uk-1)可描述为
(1)

1.3 里程计观测模型
设ΔS为巡检机器人在运动过程中的姿态变化量,Δθ为方向角变化量,则巡检机器人在无滑动运动状态下对应的里程计圆弧运动模型为[9-10]
(2)
R为在运动过程中移动机器人对应的圆弧半径;Δx、Δy分别为Δt时间内巡检机器人的横坐标和纵坐标对应的变化量;ΔSR、ΔSL分别为巡检机器人右轮和左轮的姿态变化量;D为巡检机器人的车轮轴距;Δd为车轮运动距离。
1.4 多传感器观测模型
本文采用激光雷达传感器采集相关信息。在巡检机器人中心位置长L处放置距离传感器,通过传感器坐标系下的极坐标形式mi(r′,θ′)表示激光雷达传感器获得的特征点信息,如果相对于测量范围r,巡检机器人和传感器的中心距离L较小时,r=r′,θ′=θ。否则,需要对极坐标进行转换,获得全局地图的位置信息为
(3)

用后验概率问题代替巡检机器人SLAM问题[11-12],绘制巡检机器人地图,采用数据关联系数描述环境特征与观测数据之间存在的关联。
2 电力巡检机器人交互控制
2.1 Dijkstra算法
在路径规划算法中Dijkstra算法属于典型算法[13-14],通过Dijkstra算法获得最短巡检距离,最短路径即为起点A和终点F权重对应的最低点,设置集合U和集合H分别存放未求出和已求出的最短路径的点,以图1为例,Dijkstra算法的具体过程如下所示。

图1 路径示意
集合H在初始化巡检机器人位姿时只存在初始点A,在集合中U选取与初始点A距离最小的点C,并将其存储到集合H中,新的中心点选取为点C,并对集合U中顶点距离进行计算,如果原始距离大于起点A与顶点U之间的距离,此时顶点U的距离即为最短距离,获得最短路径A-C-F。
2.2 DWA滑动窗口法
在速度空间(v,w)中通过DWA滑动窗口法采集多组数据值[15],提前设定采样速度和运动轨迹,控制巡检机器人在规定时间段内按照设定的速度和轨迹进行模拟,选取得分最高的轨迹作为巡检机器人的运行轨迹。
通过确定电力巡检机器人旋转速度w和平移速度v的范围,计算巡检机器人的电机力矩受最大加速度和最小加速度的限制,设vd代表的是模拟周期内电力巡检机器人在动态窗口中对应的可达速度,其计算公式为
(4)

在最大速度制约下,为了保证电力巡检机器人在运行过程中绕过障碍物,需要对安全速度进行限制,模拟出电力巡检机器人的运动轨迹后,电力巡检机器人选取评分最高的路径进行运动,通过上述过程实现电力巡检机器人的交互控制。
3 实验与结果
为了验证本文提出的基于激光SLAM技术的电力巡检机器人交互控制方法的整体有效性,需要进行仿真测试。
将障碍物增设到12 m×12 m的地图中,用圆圈表示障碍物,测试基于激光SLAM技术的电力巡检机器人交互控制方法、文献[3]方法和文献[4]方法的避障能力,测试结果如图2和图3所示。
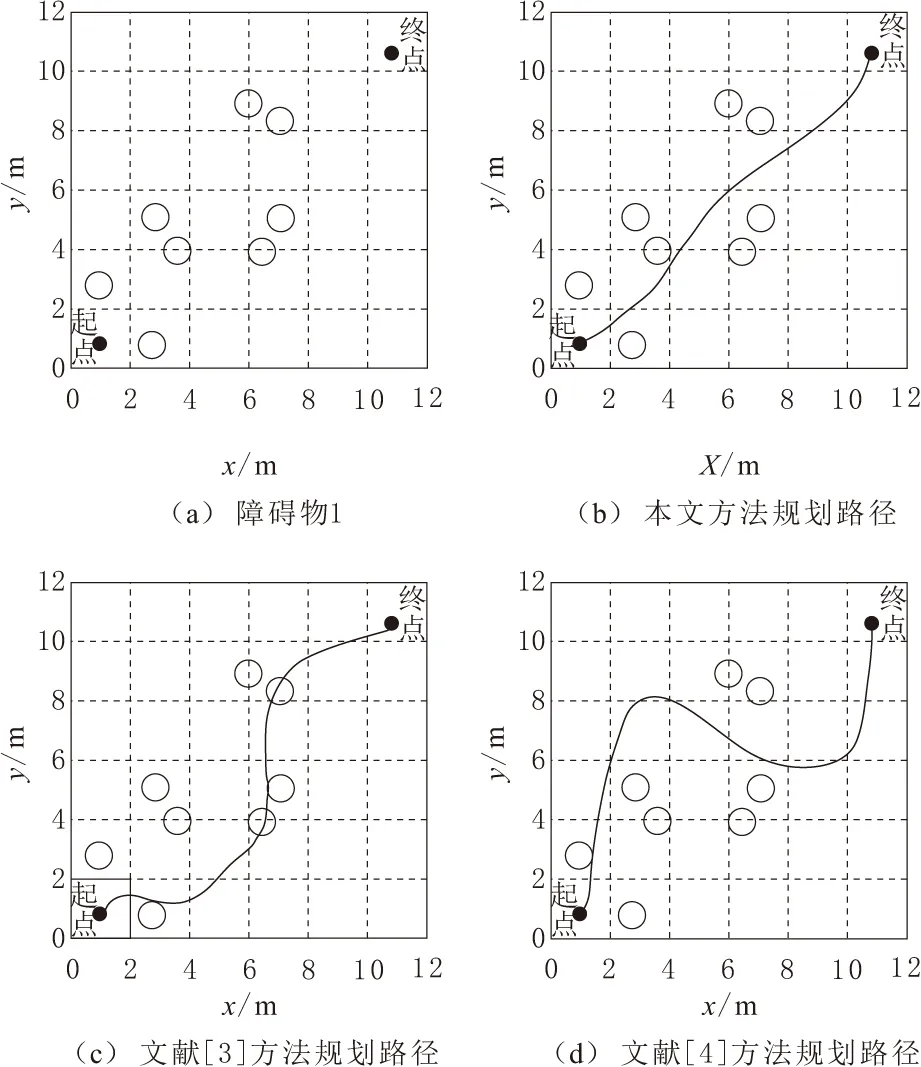
图2 障碍物1情况的路径规划结果
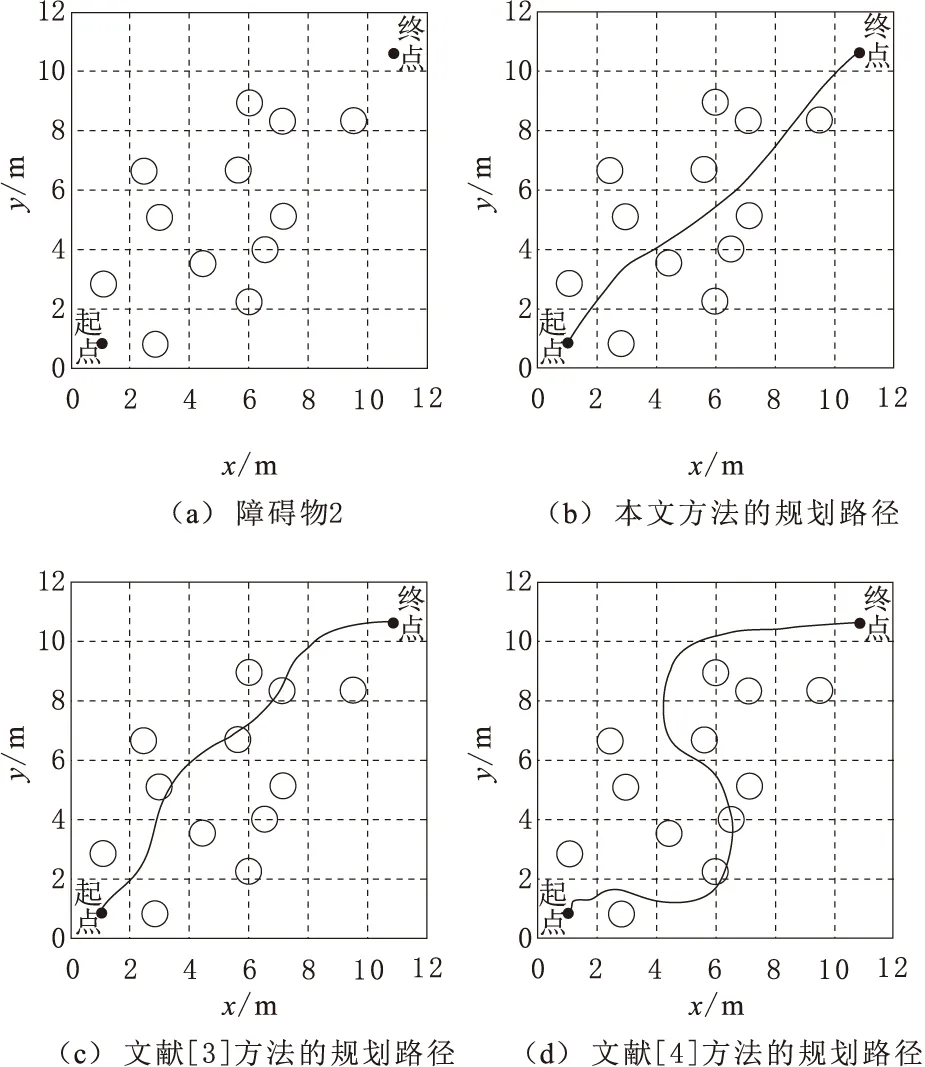
图3 障碍物2情况下的路径规划结果
在障碍物1情况下,本文方法能够绕过障碍物,且路径较短,文献[3]方法控制机器人运动时,无法避开路径中存在的障碍物,文献[4]方法规划的机器人运动路径与本文方法相比路径较长。
在障碍物2情况下,本文方法规划的路径与文献[3]方法和文献[4]方法规划的路径相比,仍然是最短的,且可有效避开路径中存在的障碍,文献[3]方法规划的路径虽然较短,但却无法避开路径中存在的障碍,文献[4]方法规划的路径最长,且无法避开障碍。
通过上述测试结果可知,本文方法可有效避开路径中存在的障碍,且保证路径最短。这是因为本文方法对电力巡检机器人进行交互控制之前,利用激光SLAM技术构建了巡检机器人地图,根据地图获取环境中存在的障碍物,有效实现机器人避障,获取最短路径。
以上述障碍物1情况下的最短路径为例,分别采用本文方法、文献[3]方法和文献[4]方法控制巡检机器人运动,通过平均绝对误差和极差测试不同方法对巡检机器人的控制精度,结果如图4所示。

图4 不同方法的控制精度
根据图4中的数据可知,在障碍物1情况下采用本文方法对电力巡检机器人进行控制时,在多次迭代中获得的平均绝对误差和极差远远低于文献[3]方法和文献[4]方法获得的平均绝对误差和极差。表明基于激光SLAM技术的电力巡检机器人交互控制方法,可精准地对电力巡检机器人进行控制。
采用本文方法在障碍物2情况下对电力巡检机器人进行控制,当角度误差低于0.2时,表明电力巡检机器人的控制精度较高,测试结果如表1所示。

表1 角度误差测试结果
根据表1中的数据可知,采用基于激光SLAM技术的电力巡检机器人交互控制方法在障碍物2情况下对电力巡检机器人进行控制时,获得的角度误差均在0.2°以内,表明基于激光SLAM技术的电力巡检机器人交互控制方法的控制精度高。
4 结束语
变电站智能化程度随着科学技术的发展不断提高,配电系统的供电范围和供电距离随着造船类、煤炭、冶金类和铁路等现代化程度的提高不断增大,在此背景下对电力巡检工作的连续性、安全性和可靠性提出了更高的要求。目前,电力巡检机器人控制方法存在避障效果差、路径规划效果差和控制精度低的问题,因此提出基于激光SLAM技术的电力巡检机器人交互控制方法,通过激光SLAMA技术获得巡检地图,在此基础上结合Dijkstra算法和DWA滑动窗口法,完成电力巡检机器人的交互控制。
