用于电力巡检机器人的挂空异物智能检测方法
2021-12-27王兴涛李文永
王兴涛,李文永,陈 亮
(华能新疆吉木萨尔发电有限公司,新疆 昌吉 831799)
0 引言
电力能源作为我国几大主要能源之一,在社会生产与日常生活中占据着至关重要的地位。只有电力安全地持续稳定供应,才能使工业进程与生活需求得到最高程度保障。随着电力信息化战略[1]的提出与计算机视觉[2]的飞速发展,巡检机器人在电力领域中得到了越来越广泛的应用与普及,进一步推动了智能电网的建设进度。为提升巡检机器人的智能化水平,众多相关领域人员将其作为研究课题,从多个角度展开了优化。
周振宇等[3]就巡检机器人的通信与计算需求,提出一种联合能量感知的高可靠低时延移动边缘计算方法,令机器人的效用最大化;李荣等[4]面向变电站室内外一体化巡检机器人,构建一种全向四驱结构的运动控制系统,增加机器人的可控性;崔坤坤等[5]为巡检机器人设计的动态双窗口下视觉导航与特征识别方法,很好地强化了导航精度与巡检点特征识别的鲁棒性。
由于变电站的设立环境多为空旷的平原地带,经常受到塑料袋、鸟巢等异物的侵扰,对电网造成安全隐患,危害电力系统稳定运行。因此,本文研究出一种适用于电力巡检机器人的挂空异物智能检测方法,确保输电线路通畅。根据光照强度、天气状况、前景与背景的分割阈值等条件,采用不同的滤波处理方法与对比度增强方法来预处理采集图像,增加检测准确度;基于局部二值模式图像特征点匹配策略来完成异物检测,有效解决对外部数据的依赖问题。
1 电力巡检机器人采集图像预处理
电力线路环境相对复杂,机器人采集到的图像通常存在一定噪声,影响后续检测准确度。因此,利用多种处理手段,预处理线路采集图像,为异物检测奠定基础。
1.1 图像滤波
机器人采集图像时,会因光照强度、天气状况等因素,令背景差异较大,故需根据表1所示的不同颜色空间变量值与背景特征关联,采用不同的滤波方式。
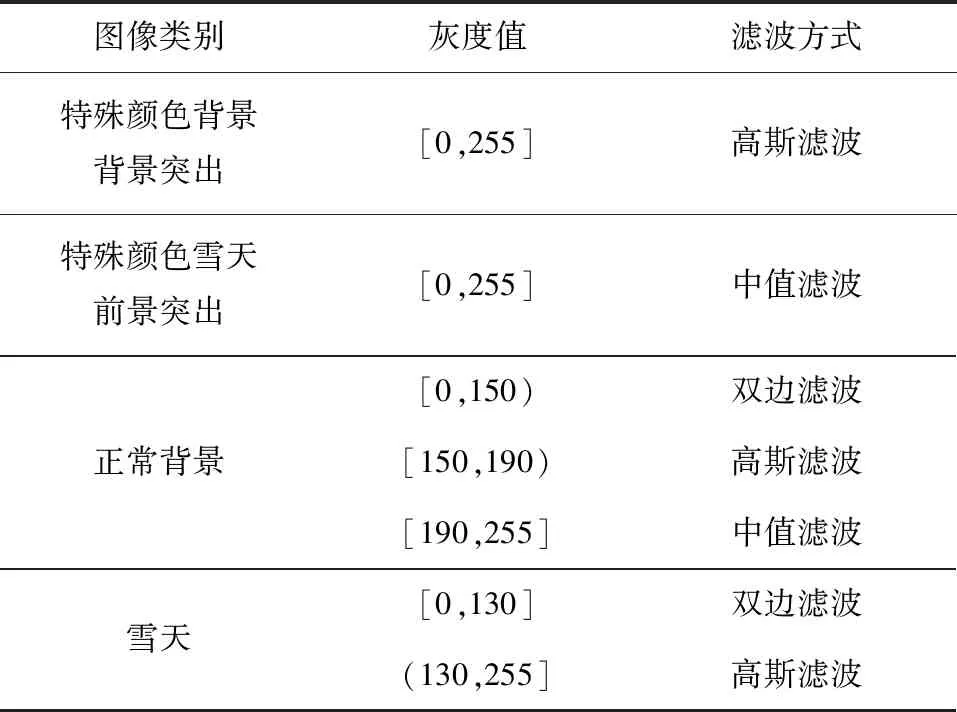
表1 图像类别及其滤波方法
各滤波方式具体实现内容如下所述:
a.均值滤波。根据线路形态颜色,增强线路边缘,可通过均值滤波的数学界定公式实现,即
(1)
z(k,l)为模板中心像素灰度值;ψ(α,β)为模板中像素灰度值;n为模板内所有像素数。
b.高斯滤波。根据可视度与外界干扰,更好地保留边缘细节,利用的高斯滤波的数学界定公式为
(2)
Wα β为坐标(α,β)的加权值。
c.中值滤波。同理,去除孤立噪声点采用的中值滤波表达式为
z(k,l)=median{ψ(α,β)}
(3)
d.双边滤波。该处理方式将像素灰度值差异所占权重作为考量因素之一,结合空间邻近度与像素值相似度,抑制低频干扰,其定义式为
(4)
w(α,β,k,l)为坐标点(α,β)的权重因子。
1.2 对比度增强
面向模糊不清的采集图像,需利用式(5)所示的对比度拉伸公式,合理分配前景与背景区间的像素占比灰度值,使线路边缘更加突出。
(5)
χ为经过拉伸的灰度级;nl为当前及其之前的灰度级含有的像素;nmin为极小灰度级含有的像素;N为像素总数。
为更好地拉伸开灰度分布较窄区间,增加图像清晰度,采用最大类间方差法[6]计算出前景与背景的分割阈值T和平均灰度值H,并以此为依据来改变分段区间与拉伸区间,如表2所示,再通过对比度拉伸公式适当增强图像对比度。

表2 灰度分段区间与拉伸区间
2 挂空异物智能检测
2.1 输电线路识别
根据输电线路的直线特征,采用霍夫变换直线提取法[7]明确电线范围。假设某平面极坐标系[8]内存在1条直线L,其与原点的间距为ρ,垂线段和x轴间的夹角为θ。结合点线对偶属性[9],按照以下流程完成基于霍夫变换的输电线路识别:
a.量化处理参数空间为m×n块,设定初始值是0的累加器矩阵。
b.使累加器与各空间块一一对应。
c.已知某像素点坐标(xi,yi),将空间块作为步长标准,在夹角θ为[0,π]中求解所有ρ值,若解值与某空间块吻合,则该块的累加器加1。空间块累加器的数值与共线像素点数量相一致。
d.当全部像素点经过遍历后,统计空间各累加器值,参数ρ、θ是累加器极大值对应空间块的数值。若L′条直线周围分布着图像空间的点,则在取得累加器值后,选取对应于前L′个极大值空间块的ρL′、θL′,即可完成多条输电线路识别。
2.2 输电线路拟合
识别出的直线有可能是属于同一条输电线路的局部导线,因此,设计出一种拟合恢复方法使线路完整。
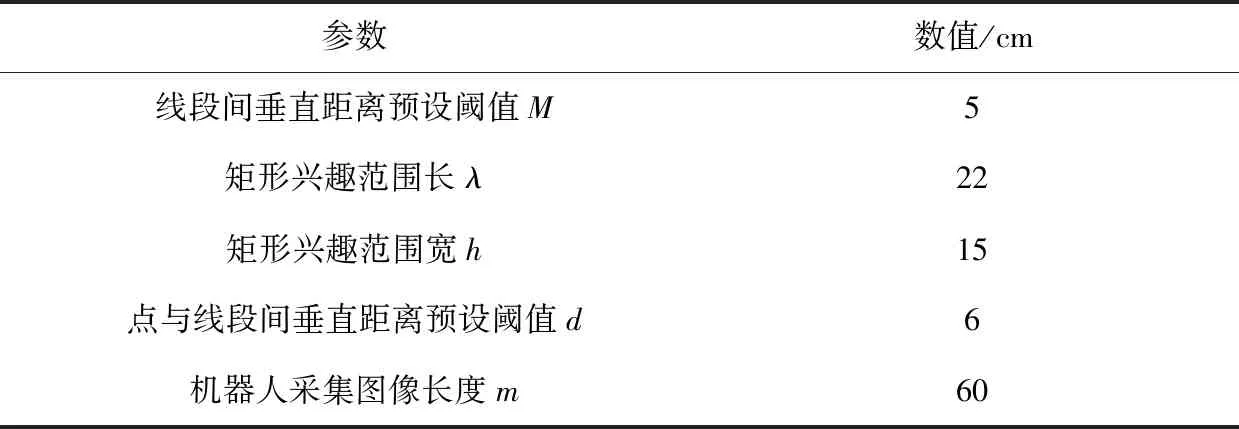
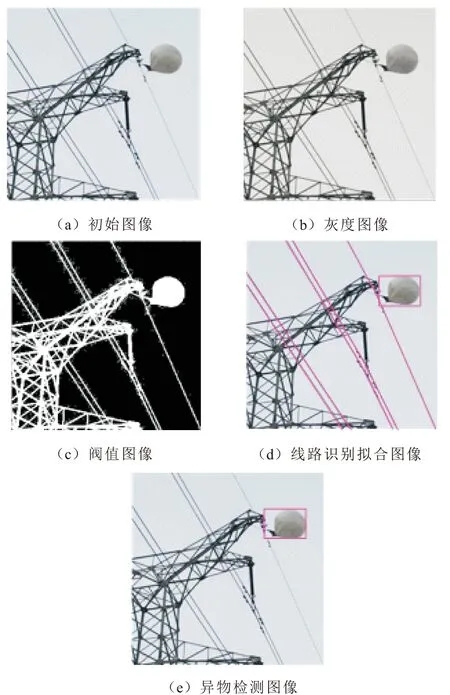
为准确判定出巡检机器人采集图像中的平行直线段L1、L2属于同一条线路边缘,需先计算出2条线段之间的垂直距离。已知线段L1、L2的2个端点坐标各是P11(a1,b1)、P12(a2,b2)、P21(a3,b3)、P22(a4,b4)。根据直线方程Ax+By+C=0与任意点P坐标(x0,y0),计算该点与直线的垂直距离d,求解出端点P11(a1,b1)与线段L2的间距D112。同理,得到端点P12(a2,b2)与线段L2的间距、端点P21(a3,b3)、P22(a4,b4)与线段L1的间距,求出2条线段间的平均垂直距离M1,通过对比预设阈值M,判断出图像中的2条线段是否属于相同线路,若M1 若线段L1与图像边界交于点Q1、Q2,解得2个交点坐标,基于此拟合出完整的线路边缘,以便后续挂空异物检测: (6) (7) m为机器人采集图像长度。同理拟合出图像中剩余直线段的完整线路。 基于局部二值模式图像特征点匹配策略[10],降低异物检测过程对外部数据的依赖。 假设输电线路L1上有1个挂空异物,该线段上点的集合是Pi(i=1,2,…,n),对应坐标是(xi,yi),且xi-xi-1=λ,点P1与端点Q1重叠。基于点P1建立长宽各是λ、h的矩形兴趣范围,遍历该范围中的所有像素点,当像素点属于黑色前景时,求解出该点与线段L1的垂直距离,与距离阈值d作对比后,若呈大于关系,则该像素点不是线路像素点,而是异物像素点,即异点,解得矩形范围中全部异点数量Ni。对于线路L1上的异物智能检测流程如下所述: a.基于点Pi(xi,yi),当xi+λ超出采集图像右侧时,不需建立矩形范围,跳至第d步;若未超出图像右侧,则建立矩形范围,进行下一步。 b.获取矩形范围中所有异点数Ni,若其与采集图像长度m之间呈大于关系,则判定局部或全部异物存在于矩形范围中,标记点坐标Pi(xi,yi),进行下一步。 c.求解出点坐标Pi+1(xi+1,yi+1)后,返回第a步。 d.如果第b步没有对应点标记,表明线路上无挂空异物,跳至第f步;如果有对应点标记,则进行下一步。 e.两两比对所有标记点,解得各横坐标差值,当差值不超过[λ,3λ]时,判定2个矩形范围中的异物属于同一异物,去除第2个标记点,待全部标记点处理完全后,进行下一步。 f.解得剩余标记点相应矩形范围几何中心坐标并输出。 按照表3所示的数值设置相关算法参数。 表3 相关参数设置 根据某国网省检修公司电力巡检机器人提供的风筝异物检测处理过程图像(如图1所示)可以看出,该方法根据不同颜色空间变量值与背景特征之间的关联,采用对应的滤波方式,基于前景与背景的分割阈值及平均灰度值,结合各背景类别的分段区间与拉伸区间,实现对比度增强。因此,各处理步骤均得到较好进行,最终理想地检测出线路上的挂空异物。 图1 异物检测处理过程 为检验方法适用性,让巡检机器人检测不同背景下的不同异物,如图2所示。从塑料袋异物检测处理过程图像可以看出,杂乱背景中的异物在该方法的处理下同样得到了准确的检测。这说明本文方法因基于局部二值模式图像特征点匹配策略,大幅降低了异物检测过程对外部数据的依赖,所以能够有效检测出各类背景中的异物。 图2 复杂背景下异物检测处理过程 采用异物检测的正确数量、错误数量、遗漏数量以及消耗时间等多项指标,从客观角度分析本文方法性能。 3.3.1 检测过程各阶段耗时分析 针对风筝、塑料袋2种挂空异物及无异物等3种情况展开消耗时间指标评估。已知风筝、塑料袋挂空异物的采集图像中分别含有651 632个像素与982 196个像素,无异物的采集图像中含有324 888个像素,检测方法中各处理流程的耗费时间如图3所示。从挂空异物的不同情况可知,所用时长随像素数量的增加而呈比例延长;从各处理流程所需时长可知,预处理阶段的对比度增强过程最耗费时间,其次便是输电线路识别阶段。因此,应将2个阶段的耗时问题作为今后研究的重点课题。 图3 不同异物检测过程中各阶段耗时 3.3.2 不同数量异物的检测效果分析 在机器人为期1个月的巡检工作中,分别对不同数量的挂空异物展开检测,检测结果如表4所示。通过多个挂空异物的检测结果可以看出,本文方法通过建立矩形兴趣范围,遍历了该范围中的所有像素点,相对准确地判定了各像素点的归属,故在异物数量较少时检测准确度较高。下一阶段需就较多异物数量时产生的误检与漏检情况作进一步优化,避免因此而引发电力事故隐患。 表4 不同异物数量检测效果 本文通过设计一种挂空异物智能检测方法,旨在拓宽机器人在电网领域的市场前景。为使本文方法能够更高效地实时检测出挂空异物,防止线路事故发生,需尝试引用更快速的处理技术与算法,针对预处理阶段中的对比度增强方法与输电线路识别方法作进一步优化;需完善挂空异物数据集,增加异物种类,使其不再仅仅局限于气球、风筝等物品,降低异物类别对检测效果的影响。2.3 挂空异物检测
3 仿真实验分析
3.1 实验参数设定
3.2 智能检测效果主观性分析

3.3 智能检测效果客观性分析


4 结束语
