基于滑模控制的超声速空中靶标安全控制系统
2021-12-27谢崧
谢 崧
(国防科技大学空天科学学院,湖南长沙 410003)
0 引言
空中靶标是防空武器系统在研制和部队训练中,用以模拟反舰导弹进行试验、考核防空作战效能的一种常用飞行器。但是受制于成本因素,空中靶标往往由接近退役或者报废的反舰导弹改装,参试时存在一定风险,尤其在组织小航捷径试验时,超声速靶标的飞行航向与参试装备的距离比较近,容易发生事故,因此采取设计合适的安全控制系统是靶标供靶飞行首先需要考虑的问题。结合超声速靶标飞行状态呈现出强非线性的特点,设计二阶快速滑模安全控制系统,对于其在入水阶段容易产生抖振等特点,结合幂次趋近律与指数趋近律的优点,设计组合PID趋近律,整个过程自动完成,具有较快的入水速度以及较高的入水精度。
1 靶弹自毁安全控制策略
在超声速空中靶标大机动飞行情况下进行回收研究,分为以下3个阶段:
(1)进入自毁窗口段:调整超声速空中靶标姿态、高度和速度进入适合的范围,此时主要是由空中靶标飞控系统控制。
(2)无动力飞行段:发动机停车到大机动入水降落段,空中靶标作无动力飞行。
(3)大机动入水降落段:此阶段空中靶标作降高机动,确保空中靶标入水。
2 系统模型
2.1 进入自毁窗口阶段
进入自毁窗口阶段,飞行器主要由飞行控制系统管理,目的是确保空中靶标进入适合的飞行范围,靶标在飞行过程中受力的两大来源为气动力和发动机推力,结合计算难度以及对动态特性的反映程度构建模型。在飞行器运动建模过程中,对一些情况进行简化处理:①地球为旋转、圆球模型;②采取标准大气模型;③忽略质心位置变动对气动特性的影响。
其中六自由度动力学方程是在弹体坐标系与动力坐标系中展开,该阶段为方便快速计算,采取线性方法进行控制。
2.2 无动力飞行段
无动力飞行段是空中靶标进入自毁航线后的第二个阶段,此阶段空中靶标姿态对自毁的影响很大,一般在此段之前使空中靶标飞行状态保持为平直飞,这样可以保证接下来入水的安全与精度。此时发动机是停机状态,对空中靶标的推力不再考虑,靶标所受力只有空气动力与自身重力,同时在该段飞行过程中,空中靶标控制由飞控系统控制转换为安全控制系统控制。
2.3 大机动入水降落段
该阶段主要是运用非线性滑模控制器进行控制,一般的滑模控制设计流程如下:对于系统:

存在切换函数:

根据切换函数s(τ)求得控制函数u:

对于入水降落段高度的控制,动力学方程采取俯仰角控制,因为采取的方案是弹道程序角设计思路,所以设计跟踪指令偏差为:

控制滑模面为:

在超声速空中靶标入水过程中,因为飞行工况变化较大,非线性过程明显,为此结合指数趋近律快速趋近的优点和幂次趋近律稳定趋近的优点设计PID趋近律,此时趋近律在初期能够快速推动状态变量向原点,但当接近滑模面时,该趋近律速度很快减小,能够减小穿越滑模面时的幅度,解决变结构中固有的抖振问题。
PID趋近律如下:

式中,kp>0,为比例系数;kt>0,为积分系数;kd>0,为微分系数。为了加快趋近速度,将比例项-(s+sgn(s)kp)加入常数kp来修正,t0是运动点第一次达到滑模面的时刻,t是当前时刻,积分项是为了控制抖振的幅度。
3 仿真结果及分析
系统模型建立后,需要通过仿真确定影响系统回收精度的因素,综合各种因素,得出最佳的初始状态,进而得出控制策略,地面坐标下的仿真结果见图1~图3。

图1 飞行器高度变化曲线
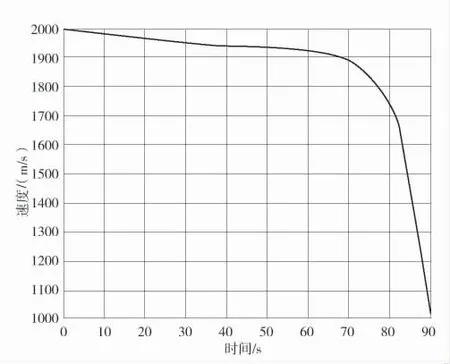
图2 飞行器速度变化曲线

图3 飞行器攻角变化曲线
该过程为飞行器全程段仿真结果,其中进入70 s为下达飞行器进入自毁入水阶段,飞行器经过20 s完成后续入水的3个阶段,整个入水过程速度比较快,能够满足相关精度要求。
4 结语
基于滑模控制的超声速空中靶标安全控制系统能够满足精度、速度的相关要求,也可通过改变系统参数用于其他空中靶标的自毁。通过对系统限定边界条件,再进行大量的仿真得出了系统自毁策略,并设定了相应的自毁控制程序,整个过程自动完成。相对以往的安全控制方式,具有成本低廉、适用范围广的特点,并减少了不可控因素。
