两轮平衡车控制系统研究
2021-12-22石亚男李玲钱建秀蔡建羡
石亚男 李玲 钱建秀 蔡建羡

摘要:本文选择在双环PID控制条件下,对两轮平衡车的加速度计与陀螺仪的数据分别进行无滤波处理、互补滤波处理、卡尔曼滤波处理,并对经过三种处理后得到小车平衡状态进行分析。结果表明,虽然在双环PID算法控制下,未经滤波处理的小车能够保持平衡状态,但如果对加速度计与陀螺仪的数据采样数据加以滤波,可以提高小车的稳定性,缩短小车恢复平衡的时间。
关键词:两轮平衡车;双环PID控制;互补滤波;卡尔曼滤波
近年来,随着我国智能电动代步交通应用科技的进步和发展,继电动车之后,两轮式自平衡电动小车的出现,成为人们休闲娱乐出行时的佳选。两轮平衡小车具有非线性、欠压力驱动、多变量、强耦合等多种特点,具有安全便携、节能环保等优点,使得两轮自动平衡车的设计制造和技术已经在国内得到了广泛应用和快速发展。
两轮自动的平衡车主要通过两个固定的电动平衡轮为车身提供运动支撑,采用自动的蓄电池为平衡小车内部进行了动力转换和供电。目前,两轮自平衡电动小车控制算法大多数都采用了比较经典的PID控制、LQR控制、神经网络控制、滑模自动变速器控制以及模糊控制等控制算法。
本文运用PID控制方法,从陀螺仪和加速度计进行分析,为使控制器接收到的数据更加准确,设计了互补滤波器和卡尔曼滤波器,通过对互补滤波器与卡尔曼滤波器数据融合情况的对比分析,选择设计卡尔曼滤波器对两个传感器采集到的小车倾角数据滤波融合,最后利用MATLAB平台Simulink模块对设计的滤波器融合算法进行验证。
一、兩轮平衡车平衡控制方法
(一)双环PID控制
本文选用双环PID控制算法,PID控制算法的核心是闭环控制,而由于两轮自平衡小车的独特性,可以把控制分为角度环控制和速度环控制的双环PID控制。
平衡小车的速度控制环使用的是PI(比例积分)组合控制器,它主要的功能根据组合控制器输出给定的控制值,与实际组合控制器输出的控制值组合,构成对速度控制的组合和偏差,将之前的所有速度控制偏差的比例积分组合,如控制比例(P)和控制比例积分(I)通过一个相对线性的函数与组合控制器分别构成一个相应的速度控制和偏差变量,对于被控对象中的值进行速度控制。
(二)互补滤波器设计
加速陀螺仪抑制加速积分运动函数的最大误差主要在高频段,加速度计抑制运动积分的主要误差在低频段,两者在频域上几乎基本可以完全互补。在小于截止频率的低频段,加速度计对陀螺仪解算的结果抑制积分起主要的作用;在大于截止频率的高频段,陀螺仪对加速度计解算的结果抑制积分起主要的作用。
互补滤波器的设计是可以把陀螺仪和加速度计输出信号作为两路进入,将陀螺仪检测的角度值经过积分器和高通滤波器,其中高通滤波器的作用是抑制积分产生的零点漂移;加速度计采集到的数据经过低通滤波器,低通滤波器的作用是既可以抑制加速度的水平干扰又可以去除加速度计在短时间内信号波动性较大的部分。把陀螺仪处理过后的数据乘以加权值a,加速度计处理的数据乘以加权值1-a,最后两个传感器的加权数据进行融合处理。通过补偿传感器的漂移误差和动态误差,融合后的数据更加接近小车车体的真实倾角值。
(三)卡尔曼滤波器的基本设计
卡尔曼滤波的动态系统处理是由卡尔曼的状态观测方程和实际观测方程相结合来进行描述和体现,状态观测方程本身就是用来描述和体现系统状态变量和实际观测量之间的相互关系,而卡尔曼的状态观测方程是用来反应系统状态的变化规律。因此相比于其他传统的观测数据处理的方法,卡尔曼滤波方程可以在求解最优的估计值时,不需要系统中储存大量的状态观测值和滤波数据,而且当系统得到新的状态观测值和滤波数据时,可随时自动计算得到新的观测参数和滤波值,便于实时地分析处理当前观测成果。最突出的系统处理优势之一就是从噪声的状态观测量中可以得到对系统状态的最优估计值。
二、结果分析
本设计是在双环PID控制下,对比将小车的加速度计与陀螺仪的数据无滤波处理、通过互补滤波器、通过卡尔曼滤波器进行处理三种情况下的小车在平衡过程中位置与角度的变化图,对其特性进行分析。
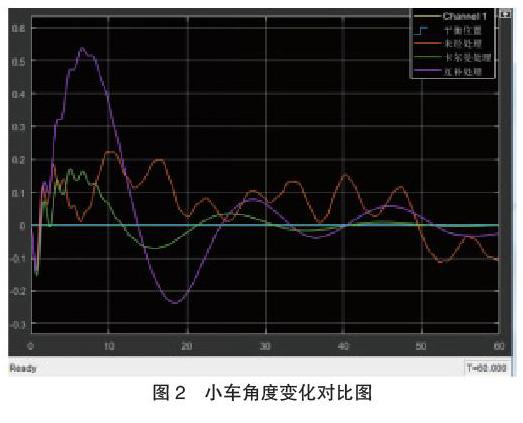
零时刻,初始角度θ(k)=0.03时,小车在平衡过程中的位置与角度变化如图1、图2所示。
从图1可以看出,在小车平衡过程中,未经过滤波处理的小车在平衡位置左右摆动,很难再次达到平衡状态;经过互补滤波器处理的小车在开始一段时间内波动较大,之后可以恢复在平衡位置小范围摆动;经过卡尔曼滤波器处理的小车可以较快恢复至平衡位置并保持稳定。
从图2可以看出,在小车平衡过程中,未经过滤波处理的小车摆动角度一直偏大,并长时间存在波动角度;经过互补滤波器处理的小车在开始一段时间内角度变化较大,而后可以恢复在一定范围内小幅度波动;经过卡尔曼滤波器处理的小车可以恢复在平衡位置且摆动角度为零。
参考文献:
[1]刘雪薇.双轮自平衡小车的建模与控制方法研究[D].武汉理工大学,2015.
[2]吴振磊,叶金汉.一种两轮自平衡车的控制模型分析与实现[J].轻工科技,2018,34(06):78-79.
许良凤,李艳秋,胡敏,等.基于I-DCV人脸识别方法[J].电子测量与仪器学报,2015,29(1):106-110.
[3]梁华,李晓虹,杨光祥.两轮自平衡机器人动力学模型分析及PID控制方法研究[J].重庆师范大学学报(自然科学版),2016,33(01):163-167.
[4]吴振磊,孙二威,李笑笑.一种基于PID算法的自平衡车控制系统设计[J].甘肃科技纵横,2019,48(08):22-24.
[5]高杰,赵玫,孔祥领,杨洪勇,邓冠龙,刘慧霞.基于互补滤波算法的多传感器平衡车系统设计[J].鲁东大学学报(自然科学版),2017,33(02):139-143.
[6]史策.模糊滑模控制在两轮自平衡小车中的应用研究[D].安徽工业大学,2019.
[7]李泽宇.基于卡尔曼滤波和双闭环PID控制的平衡车控制系统设计[J].电子世界,2018(01):100-102.
[8]魏春晓,李博峰.一种适用于GNSS变形监测的滑动滤波模型[J].导航定位学报,2019,7(03):125-130.
本文系:2019-2020年度河北省高等教育教学改革研究与实践项目:2019GJJG471的研究成果。
