基于PID反馈和前馈的车道保持控制策略研究
2021-12-22




中图分类号:U462 文献标识码:A
0引言
自主转向控制策略作为车道保持辅助系统的主要核心技术之一,是保证车辆稳定行驶在预定轨迹至关重要的一环。施卫等人根据车辆动力学模型设计了一种基于LQR 的控制器模型,罗莉华结合车辆侧向动力学模型和模型预测控制(MPC)设计了一种车道保持控制系统,并且都通过在线仿真验证了控制模型的性能。上述两种方案虽已经过仿真的验证,但是都太过于依赖车辆动力学模型。而实际车辆的动力学与道路环境密切相关,要想很好地应用在实际车辆的控制中,较为困难。
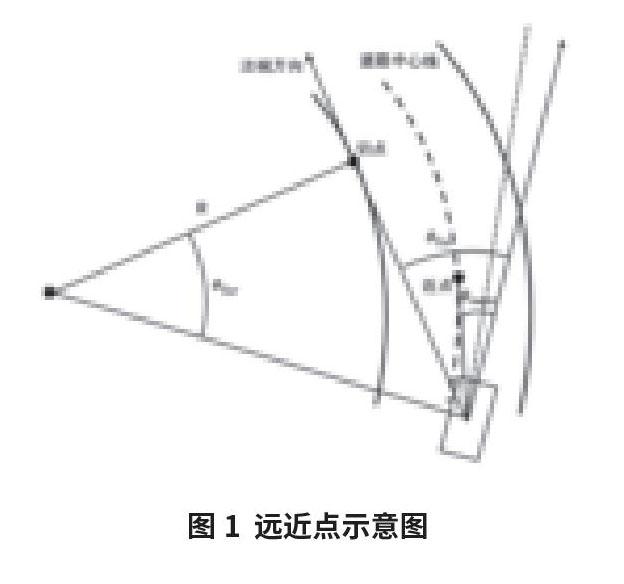
郭洪强设计了一种包含了前馈控制和PID反馈控制的控制系统,并通过实际车辆进行了验证,表明了PID反馈控制结合前馈控制在实际应用中的可行性。但是由于只考慮了车辆当前位置的误差,系统会存在振荡周期过长甚至不收敛的情况。考虑到驾驶员在驾驶时会注视前方远近2 个不同区域,所以在使用驾驶员预瞄机制时,要充分考虑前方远、近2个区域。张慧豫便提出了基于远、近预瞄点的转向控制模型,该模型的远近点设置如图1 所示。但是该控制模型采用的是基于内模转向控制的方法,虽经过了仿真试验,但是缺少实车的验证。
基于上述结论,本文考虑了远、近预瞄点对转向控制的作用效果以及曲率前馈控制的补偿作用,设计了一种包含PID反馈和前馈的控制策略。其中,远、近预瞄点的PID反馈控制用于消除车辆与目标轨迹间的横向偏差及航向偏差,使车辆能快速且稳定地回到目标轨迹。前馈控制用于消除在弯道中由曲率带来的较大偏差量,使得远、近预瞄点的PID控制模型在直道与弯道中不会有太大差异,避免弯道中的PID超调及控制量不足情况,提升控制系统的过弯能力,也便于PID参数的调节。
1 远、近点预瞄模型
1.1 远、近预瞄点的设计
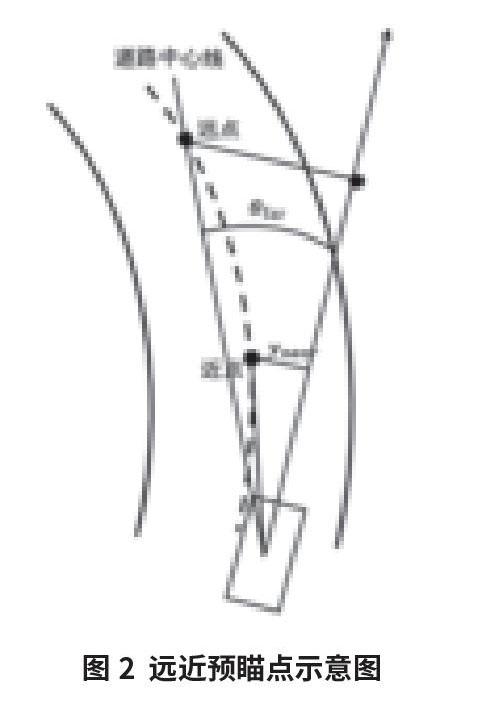
本文将远、近预瞄点均设置在车辆的目标轨迹上(图2)。其中,近预瞄点主要用于快速消除与目标轨迹的横向误差,远预瞄点用于消除与目标轨迹的航向误差。
为了更加符合驾驶员的真实驾驶习惯,远、近预瞄点的距离根据车速的大小设定。可在高速度行驶时,将预瞄点拉远;在低速度行驶时,将预瞄点拉近,具体关系如下:
2.2 前馈控制量标定
考虑到车辆滑移及横摆角速率的影响,在不同的车辆速度中,车辆对同一曲率的弯道所需方向盘转角不同,故前馈控制量δfeedforward需根据速度及道路曲率进行实车标定获得。
3 实车验证
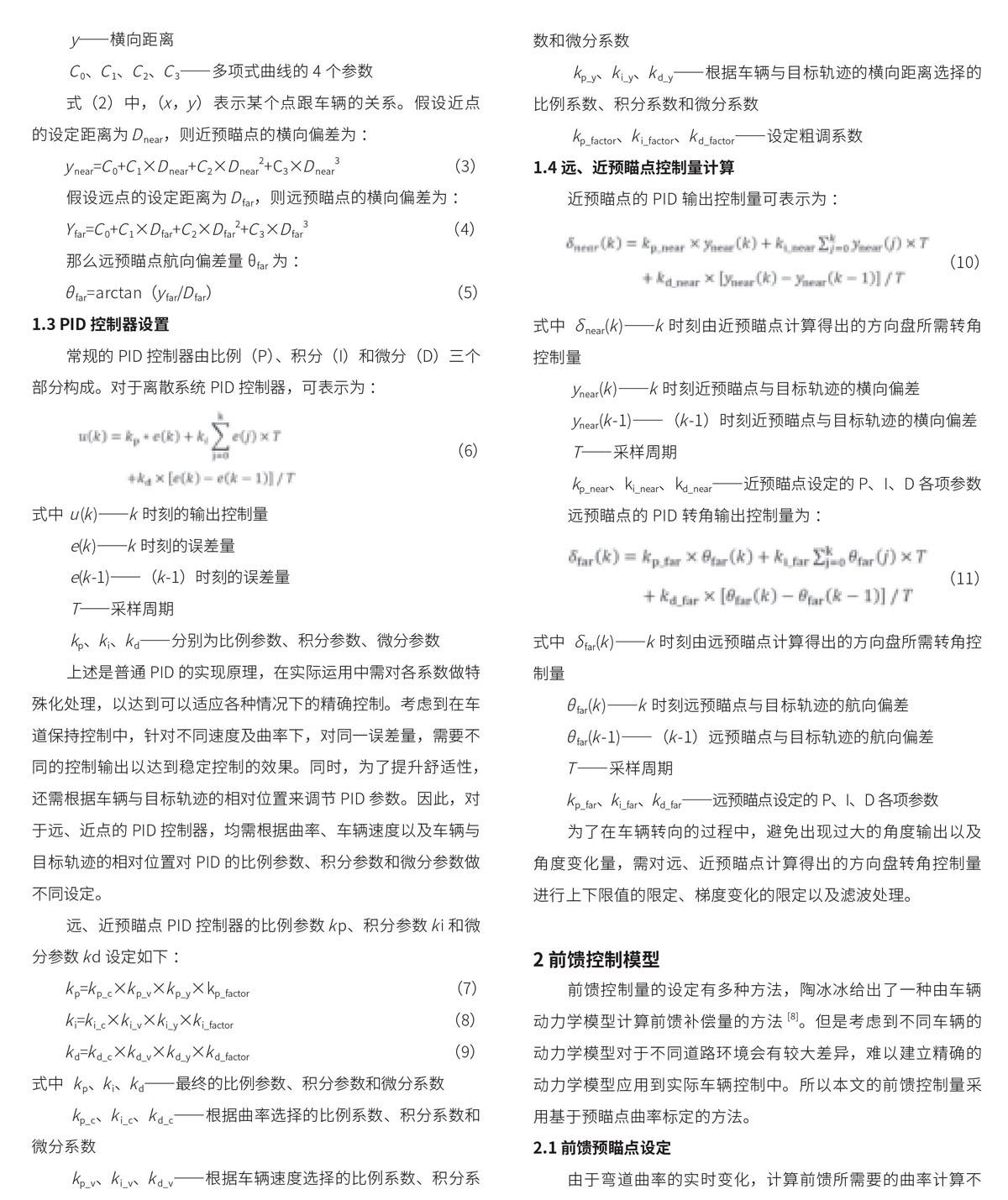
本文使用某车型进行了上述车道保持控制策略的验证,在车辆前挡风玻璃中间安装了可输出车道线信号的智能摄像头传感器,用于获取道路车道线信号。控制模型软件烧录在基于英飞凌TC367芯片的控制器中,通过CAN 总线实现控制器与摄像头传感器和车辆的信号通信,并通过CANoe设备采集测试数据(图3)。控制器将控制模型计算得出的方向盘转角数据发送给车辆EPS执行器,通过EPS 控制车辆的转向。本文在标定完成远、近点PID参数及前馈补偿量后,进行了直道、弯道以及长距离快速路的实车测试验证。
3.1 直道测试
为了验证车辆在偏离车道后的中心线回归能力及车道保持性能,在启用车道保持控制前通过向车辆方向盘施加驾驶员扭矩使车辆偏离中心线,再启用车辆车道保持控制。左右车道线及车道中心线的横向偏差如图4所示,期望方向盘转角和车辆实际执行的方向盘转角如图5所示。通过图4 可以看出,车辆与目标轨迹的横向偏差始终保持在极小范围内且无较大波动。即使经驾驶员手力介入,使车辆偏离中心线(如图4所示的8s处),车辆也可在一个振荡周期内回到车道中心线,且无过大超调及振荡情况。从图5 也可看出,方向盘转角很快收敛,表明了控制模型在直道中良好的控制性能。
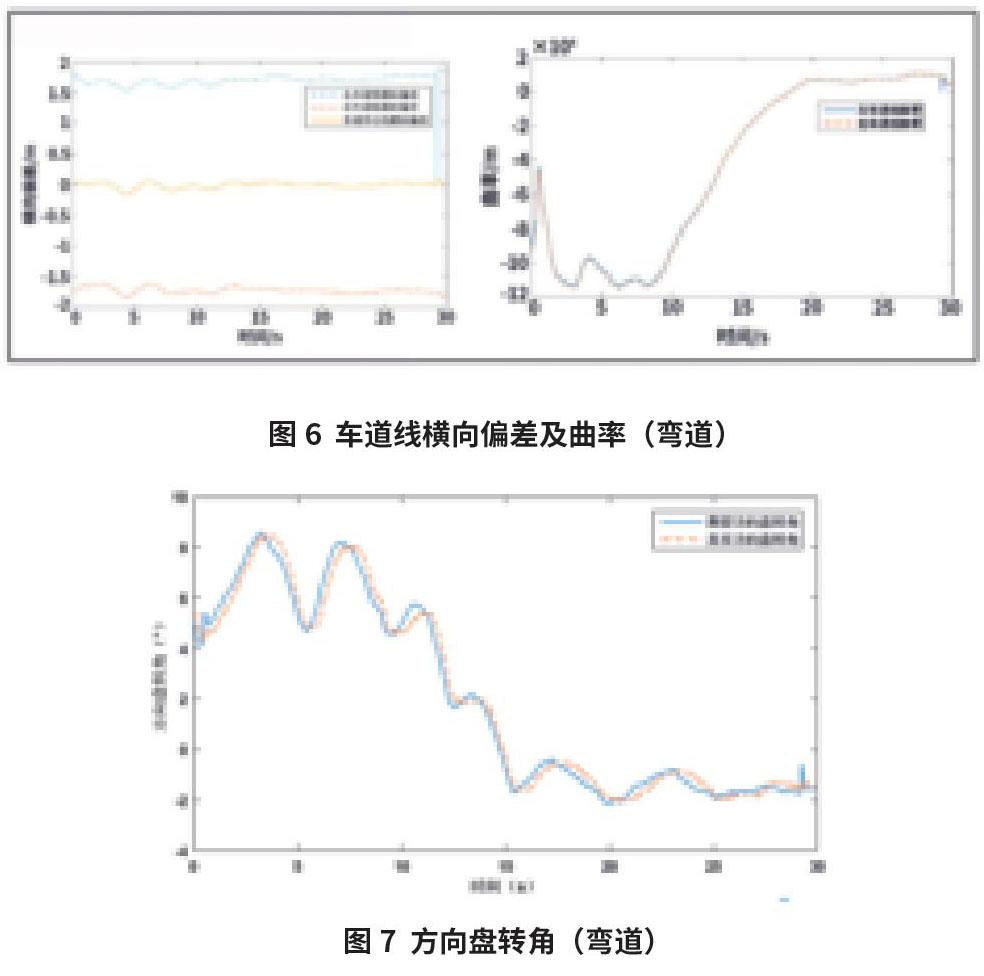
3.2弯道测试
图6为左右车道线、期望中心线的横向偏差及左右车道线曲率,当一侧车道线横向偏差突变时,可以利用另一侧车道线及历史车道宽度计算车道中心线。图7为控制模型计算的期望方向盘转角和EPS 实际执行的方向盘转角。数据表明,当曲率存在波动变化的情况下,车道中心线横向偏差依然能保持在一定范围内,未发生较大波动。可见控制模型能将车辆稳定控制在车道中心。
3.3 快速道路综合测试
图8为在快速道路上用CANoe录制的测试数据。可以看出,在LKA状态为激活状态时,左右车道线横向偏差稳定保持在一定范围之内,说明车辆可稳定的行驶在车道中心。
4 结束语
本文设计的车道保持控制策略结合了基于曲率的前馈控制和基于远、近预瞄点的PID反馈控制,并经实车测试验证,在不同车速以及在不同曲率的车道中均可实现良好的车道保持功能。该控制策略适用于众多车型的车道保持开发,但控制效果较为依赖PID参数及前馈控制参数,而且参数的标定需要一定经验的积累。
