永磁同步电机转速环扰动反馈线性化控制
2021-12-22扶文树储建华王刚
扶文树 ,储建华 ,王刚
(1.南京信息职业技术学院智能制造学院,江苏 南京 210036;2.江苏开璇智能科技有限公司,江苏 苏州 215101)
永磁同步电机具有功率密度高、运行可靠等优点,被广泛应用于伺服驱动领域。由于永磁同步电机系统的变量耦合非线性、模型不确定性以及不可预测的参数摄动和外部干扰,传统的线性控制方法,如PI控制,无法保证永磁同步电机伺服系统具有足够高的性能[1-2]。为了提高永磁同步电机的控制性能,近年来发展了众多非线性控制方法,如滑模变结构控制[3]、反步控制[4]、自抗扰控制[5]、反馈线性化控制[6-7]等,这些控制方法从不同角度改善了电机的控制性能。
滑模变结构控制由于其对系统参数摄动的鲁棒性较高,在永磁同步电机控制领域得到了广泛应用。然而,在外部干扰和系统参数摄动的情况下,需通过提高滑模控制器的增益来保证系统的鲁棒性,从而导致系统出现抖振现象。针对该问题,学者们对滑模控制进行了改进,采用趋近律和干扰观测器来减小抖振。文献[8]通过设计趋近律来减小滑模抖振,其导致滑动面附近的系统鲁棒性降低,同时增加了趋近时间。文献[9]设计扩张状态观测器来估计扰动,在控制律中消除抖振,然而,该方法在提高系统瞬态响应方面有所欠缺。由于使用线性控制方法来设计控制器,反馈线性化控制成为非线性控制理论的最佳成果之一。文献[10]将反馈线性化控制器与PI控制器相结合设计永磁同步电机转速环,然而,在实际应用中,无论有无PI控制器,反馈线性化控制都无法在模型不确定性和未知干扰的情况下完成瞬态响应,其必须与其他方法有效结合使用,以确保系统稳定性。
针对上述问题分析,本文设计了基于高增益扩张观测器的反馈线性化控制器用于永磁同步电机转速环系统。首先,将系统内部参数摄动和外部负载扰动结合,基于永磁同步电机完全数学模型设计高增益扩张观测器对该扰动进行观测。其次,简化永磁同步电机数学模型,结合系统电流环PI控制,设计基于永磁同步电机简化数学模型的高增益扩张观测器,从而降低了观测器的阶数,提高系统执行效率。最后,在扰动观测的基础上,对系统转速环进行反馈线性化控制,提高系统转速动态响应性能。实验将基于扰动观测的反馈线性化控制器与传统PI控制器作对比,其结果验证了反馈线性化控制器对转速突变和外部负载扰动有着较强的鲁棒性。
1 基于完全数学模型的高增益扩张观测器设计
以电机d,q轴定子电流id,iq,转子机械角度θ以及转子机械角速度ω为状态变量的永磁同步电机状态方程为

式中:ud,uq为电机定子d,q轴电压;np为电机极对数;R,L为电机定子电阻和电感;km为转矩系数;J为转动惯量;B为粘滞摩擦系数;TL为负载转矩。
对式(1)中的系统Ⅱ作以下变化,定义电机加速度ξ为

结合式(1)中有关ω的项,得到:

对式(3)求导,得到:

结合式(1)、式(2)和式(4),得到:
由此,系统Ⅱ改变为
整个永磁同步电机系统被分为Ⅰ,Ⅱ两个系统,针对每个系统分别设计相应的高增益观测器,将电机参数摄动和负载扰动考虑其中,系统Ⅰ,Ⅱ数学模型改变为

结合式(7)、式(8),Ⅰ和Ⅱ两个系统相应的高增益观测器分别设计为
基于所设计的扩张高增益观测器,利用反馈线性化方法导出达到目标转速的控制律。根据式(9)式(10)可知,该观测器阶数较高,系统执行压力较大,考虑结合电流环PI控制,通过简化永磁同步电机的数学模型重新设计观测器。
2 基于简化数学模型的高增益扩张观测器设计
定义电流环d,q轴电流跟踪误差ed,eq为

式中:idref,iqref分别为d,q轴电流给定。
电流环选用PI控制,则电流环输出为

式中:kp,ki分别为电流环比例、积分增益;xd,xq为电流误差积分项。
将式(12)中ud,uq代入式(1),得到有关电流误差的状态方程为

考虑到电机τ值较小,为了将模型简化,将τ值近似为零,则式(14)简化为

将式(11)代入式(1),得到:

结合式(13)、式(15)、式(16),得到:

考虑电机参数摄动和负载扰动,式(17)中有关ω的式子改写为

由此,基于简化数学模型的观测器设计为

对比式(10)与式(19),相较与基于完全模型的观测器,基于简化模型的观测器阶数降低,大大降低了系统的复杂度,更有利于系统的高效执行。
3 转速环扰动反馈线性化控制
定义系统转速环角速度跟踪误差eω为

式中:ωref为系统给定角速度。
将ωref代入式(18),得到:

在这种情况下,期望角速度跟踪误差的瞬态响应与下列目标系统的瞬态响应相匹配:

系统控制律给定为

综上,基于高增益扩张观测器的永磁同步电机转速环反馈线性化控制系统框图如图1所示。

图1 基于高增益扩张观测器的永磁同步电机转速环扰动反馈线性化控制结构框图Fig.1 Disturbance feedback linearization control structure for PMSM speed loop based on extended high-gain observer
4 实验结果及其分析
为验证基于高增益扩张观测器永磁同步电机转速环反馈线性化控制器的优势所在,在永磁同步电机交流调速实验平台上,将本文提出的转速环反馈线性化控制与传统PI控制作对比实验,实验平台如图2所示。

图2 实验平台Fig.2 Experiment platform
图2中,被控永磁同步电机安装有24位绝对值编码器。对应的永磁同步电机参数如下:额定功率1.2 kW,额定电压220 V,额定电流6.5 A,额定转矩4.6 N·m,额定转速 2 500 r/min,定子电阻0.55Ω,d,q轴电感4.43 mH,极对数为4,转子磁链0.175 Wb。
为了验证基于高增益扩张观测器的永磁同步电机转速环反馈线性化控制在电机启动阶段的性能,在100 ms时刻,给定电机250 r/min的阶跃转速,图3为给定转速阶跃下的电机启动阶段的给定转速与实际转速对比,其中nref为系统给定转速,n为实际转速。图3a系统中的转速环和电流环均使用传统PI控制,图3b系统中的转速环使用反馈线性化控制,电流环使用传统PI控制。从图3a中可以看出,在转速阶跃给定下,电机实际转速的跟踪性能较差,存在约100 r/min的超调,并且调节时间较长,达到125 ms左右。对比图3b反馈线性化控制,电机实际转速可以几乎无超调地达到目标给定值,调节时间大幅度缩短,仅为30 ms左右。由此验证了基于高增益扩张观测器的转速环反馈线性化控制在电机启动阶段的瞬态响应性能。

图3 启动阶段的给定转速与实际转速对比Fig.3 Comparison between the given speed and the actual speed in the starting stage
为了验证基于高增益扩张观测器的永磁同步电机转速环反馈线性化控制在给定电机转速突变下的动态响应性能,给定电机4个阶段过程的转速突变,图4为给定转速突变下的给定转速与实际转速对比。图4中,在1 000 ms时刻,给定转速由0 r/min突升至250 r/min;在2 000 ms时刻,给定转速由250 r/min突降至100 r/min;在3 000 ms时刻,给定转速由100 r/min突升至250 r/min;在4 000 ms时刻,给定转速由250 r/min突降为0r/min,将该4个阶段分别记为T1,T2,T3和T4阶段。根据图4a可知,传统PI控制下的T1和T4阶段转速跟随性较差,在给定转速突升瞬间,实际转速超调达到约100 r/min;在T2和T4给定转速突降瞬间,实际转速超调同样达到约100 r/min。对比图4b反馈线性化控制,无论T1和T4阶段给定转速突升还是T2和T4阶段给定转速突降,电机实际转速总是可以无超调地快速跟踪目标转速,由此验证了基于高增益扩张观测器的转速环反馈线性化控制在系统给定转速突变下的动态性能。

图4 给定转速突变下的给定转速与实际转速对比Fig.4 Comparison between the given speed and the actual speed under the sudden change of the given speed
为了验证基于高增益扩张观测器的永磁同步电机转速环反馈线性化控制对于电机内部参数摄动的鲁棒性,在T1,T2时间段,系统给定电机定子电阻R为实际定子电阻R0,即R=R0。在T2时间段过后,系统给定电机定子电阻R为0.5倍的实际定子电阻R0,即R=0.5R0。图5为参数摄动下的给定转速与实际转速对比。根据图5可知,在T1,T2时间段,系统无参数摄动,在给定转速突变的情况下电机实际转速可以很好地跟随给定转速。在T3,T4时间段,系统存在电阻参数扰动,在给定扰动瞬间,电机实际转速相对于给定转速存在稍许超调,经调节后,在给定转速突变的情况下电机实际转速同样可以无超调地快速跟踪目标转速,由此验证了基于高增益扩张观测器的转速环反馈线性化控制对于电机内部参数摄动的鲁棒性。

图5 参数摄动下的给定转速与实际转速对比Fig.5 Comparison between the given speed and the actual speed under parameter perturbation
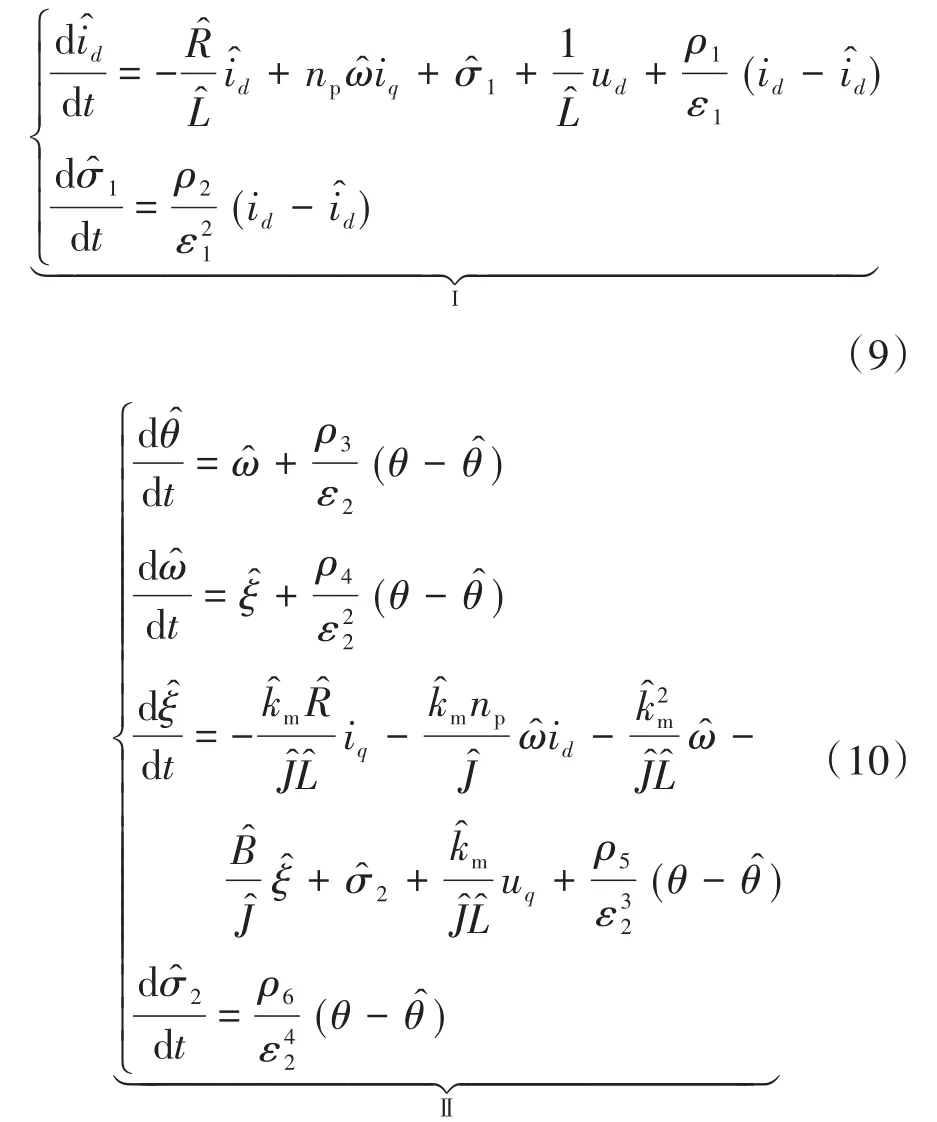
为了验证基于高增益扩张观测器的永磁同步电机转速环反馈线性化控制在给定电机负载突变下的动态响应性能,电机在额定转速下,800 ms时刻,给定电机突加额定负载,图6为突加额定负载下的电机实际转速和转矩电流对比。从图6a中可以看出,给定电机突加额定负载瞬间,电机实际转速存在大约25 r/min的扰动,大约经过250 ms左右转速恢复稳态。对比图6b反馈线性化控制,在突加额定负载瞬间,电机转速扰动由25 r/min下降至10 r/min左右,转速调节时间由250 ms缩短至180 ms左右,由此验证了基于高增益扩张观测器的转速环反馈线性化控制系统对外部负载扰动具有较强的鲁棒性。
图6 给定负载突变下的实际转速与电流对比Fig.6 Comparison of actual speed and current under given load sudden change
5 结论
设计了一种基于高增益扩张观测器的扰动反馈线性化控制器用于永磁同步电机转速环系统。基于永磁同步电机完全数学模型设计高增益扩张观测器对该扰动进行观测,简化永磁同步电机数学模型,结合系统电流环PI控制设计基于简化数学模型的高增益扩张观测器,从而降低了观测器的阶数,提高了系统执行效率。在扰动观测的基础上,对系统转速环进行反馈线性化控制。实验将基于扰动观测的反馈线性化控制与传统PI控制从电机启动、给定转速突变和给定负载转矩突变3个方面作对比,其结果验证了相比于传统PI控制,基于高增益扩张观测器的反馈线性化控制对转速突变和外部负载扰动有更强的鲁棒性。
