基于EDPF算法的高空高压线故障智能识别
2021-12-22李建华周灵刚
李建华,周灵刚
(国网浙江台州供电公司,台州 318000)
高压线的主要功能为传输高压电力[1],山区危险高空高压线长期工作在复杂的自然环境中,受多变天气的影响,有较大概率形成异物悬挂、绝缘子破损与断股等故障[2]。若无法在第一时间处理故障,易发生电力传输中断问题[3]。
当前常用的高压线故障智能识别方法主要有基于高频测试信号注入的线路故障识别方法[4]和基于改进方向电流法的线路故障识别方法[5]。前者利用智能电表获取电网信息内的阻抗参数,同时依照阻抗特性与电网高频测试信号实现高压线故障识别;后者将方向电流法作为核心,结合暂态能量偏离度共同实现高压线故障识别。但上述方法的实际应用难度较大,且易受外界自然环境的影响,故障图像的筛选效率较低。
针对以上问题,笔者研究了新的基于无人机航拍的山区危险高空高压线故障智能识别方法,准确识别了高压线故障,提升了山区危险高空高压系统运行的稳定性。
1 山区危险高空高压线故障智能识别方法
1.1 无人机航拍图像恢复处理
无人机航拍图像在成像过程中会存在变形、失真等问题[6-7],影响航拍图像的质量,为此,需对无人机航拍图像进行恢复处理。通过构建无人机航拍图像的近似退化模型,利用b(x,y)表示物平面上实际无人机航拍图像,最终获取退化模型描述的退化无人机航拍图像。
l(x,y)=H[b(x,y)]+n(x,y)
(1)
式中:l(x,y)和H[·]分别为退化无人机航拍图像和成像过程中全部退化因素的变换函数;n(x,y)为外部加性噪声[8]。
依照线性系统理论得到
H[b(x,y)]=H[b(x,y)*ϑ(x,y)]=
b(x,y)*H[ϑ(x,y)]=b(x,y)*h(x,y)
(2)
式中:ϑ(x,y)为单位冲击信号;h(x,y)为单位图像退化因素的变换函数。
基于此,在忽略加性噪声的条件下,利用式(3)描述退化模型的响应。

(3)
考虑H[·]的空间不变性特征,可利用式(4)描述其对位移信号的响应。
b(x-x0,y-y0)*h(x,y)=l(x-x0,y-y0)
(4)
式中:b(x-x0,y-y0)为位移信号。
结合外部加性噪声,可利用式(5)描述转换后的退化模型。
l(x,y)=b(x,y)*h(x,y)+n(x,y)
(5)
利用退化模型即可完成无人机航拍图像的恢复。
1.2 基于EDPF算法的高压线图像边缘检测
在恢复无人机航拍图像后,检测山区危险高空高压线图像边缘,防止出现虚假高压线问题[9]。选取EDPF(earliest deadline and processing time first)算法,该算法的主要优势体现在无参数、适应性强等方面[10]。
EDPF算法与ED算法相比,差异主要体现为EDPF算法的全部参数均处于上限值状态[11],在此状态下,确定全部的可能边缘段,通过亥姆霍兹理论,在全部可能边缘段中清除不具效用的假性线段。依据亥姆霍兹理论的假性线段检验过程如式(6)所示。

(6)
式中:n和r分别为线段长度像素值和沿着线段的梯度对齐像素值,称为对齐像素值;P为无人机航拍组合方法的数量;q为方向精度,其值取0.125;N为宽度;M为高度;i为像素变化参数。
在NFA(n,r)不大于1的条件下,定义该线段有效[12],相反在NFA(n,r)大于1的条件下,定义该线段无效。
EDPF算法将梯度区域内像素上限值区域作为锚点,通过同邻近点对比确定锚点。为了提升EDPF算法内锚点确定的准确率,选取五阶LOG(高斯拉普拉斯函数)算子作为对比过程中权重确定的工具[13],该算子可通过式(7)描述。

(7)
F(x,y)为像素点的对比值,其如式(8)所示。
式中:在F(x,y)≥Fth(Fth为像素阈值)的条件下,G(x,y)被定义为锚点,相反则被定义为普通边缘点。
1.3 可疑故障区定位
在山区危险高空高压线上存在断股、异物悬挂等故障时,高压线图像局部灰度会出现显著波动,因此为实现最终的故障识别,基于1.2节的高压线图像边缘检测结果,引入投影法确定山区危险高空高压线可疑故障区域[14-15]。针对无人机航拍图像b(x,y),以左下角为坐标原点,设定x和y分别为横坐标和纵坐标,用Lx=i⊆b表示b(x,y)在横坐标为x=i的垂直方向的投影线,Ly=j⊆b表示b(x,y)在纵坐标为y=j的水平方向的投影线,由此得到Lx=i={(i,y)∈b},Ly=j={(x,j)∈b}。Gv(b)为垂直方向的投影,如式(9)所示;Gh(b)为水平方向的投影,如式(10)所示。
(9)

(10)
若b(x,y)为高压线二值化图像,由此可得到b(x,y)在垂直和水平方向上的投影分别为

(11)

(12)
2 试验方法
为验证研究的基于无人机航拍的高压线故障智能识别方法的应用效果,选定某市山区高空高压系统高压线为试验对象,利用无人机对其进行航拍,随机选取其中10个区域的航拍图像(每幅图像均最多包含一个故障或未包含故障)。采用文中方法,基于高频测试信号注入的线路故障识别方法以及基于初始行波相位差的线路故障识别方法进行故障识别研究。所选区域实际故障情况如表1所示。

表1 所选区域实际故障情况
2.1 无人机航拍图像处理结果测试
2.1.1 图像恢复效果测试
高斯噪声及椒盐噪声下,各识别方法图像恢复的信噪比SNR与峰值信噪比PSNR如表2,3所示。

表2 高斯噪声条件下各识别方法图像恢复的信噪比与峰值信噪比 dB
由表2可知,在高斯噪声条件下,文中方法恢复图像的信噪比与峰值信噪比分别为12.55 dB和30.31 dB,显著优于其他3种识别方法的。由表3可知,在椒盐噪声条件下,文中方法恢复图像的信噪比与峰值信噪比分别为18.74 dB和36.69 dB,显著优于其他3种识别方法的。综合表2和表3的试验结果可知,文中方法恢复无人机航拍图像方面相较于其他3种识别方法具有明显优势,且可实现高斯噪声与椒盐噪声的消除。试验结果充分表明文中方法的适应能力较强,去噪声能力较好。

表3 椒盐噪声条件下各识别方法图像恢复的信噪比与峰值信噪比 dB
2.1.2 高压线边缘检测
图13分别为利用文中方法对编号1区域(无故障)、编号3区域(断股故障)和编号8区域(异物悬挂故障)的边缘检测结果。

图1 无故障区域航拍图像边缘检测结果
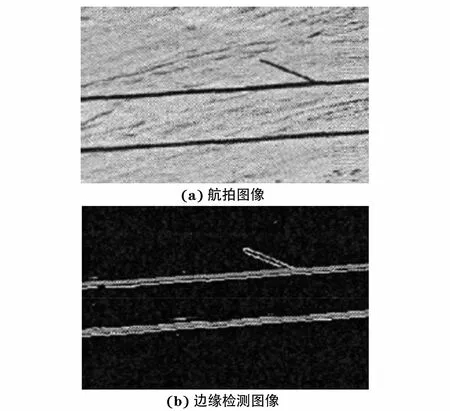
图2 断股故障区域航拍图像边缘检测结果
由图3可知,采用文中方法能够有效识别出不同高压线故障航拍图像中的高压线边缘,且边缘识别结果均正确。这一结果有利于后续可疑故障区域的准确定位和故障识别准确率的提升。
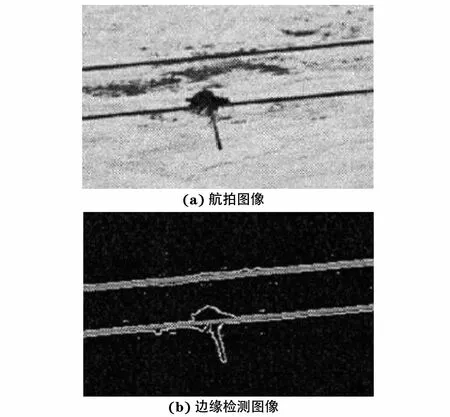
图3 异物悬挂故障区域航拍图像边缘检测结果
2.2 可疑故障区定位结果
采用文中方法对试验对象中所选区域航拍图像的故障进行定位,所得结果如表4所示。

表4 文中方法对不同区域的故障定位结果
由表4可知,采用文中方法对试验对象所选区域进行可疑故障区定位时,对无故障的航拍图像均未定位到可疑故障区域,对存在故障的图像均成功定位到一个故障区域。试验结果显示文中方法能够有效定义可疑故障区域。
2.3 故障识别准确性测试
利用文中方法识别所选区域的故障情况,所得结果如表5所示。
由表5可知,采用文中方法识别所选区域的故障,均可获取与实际故障情况一致的检测结果,由此说明采用文中方法能够准确识别试验对象的故障。
2.4 高压系统运行稳定性测试
对比文中方法和其他3种方法对试验对象各月实际运行过程中的电力波动累积时长进行统计,结果如表6所示。
由表6可知,采用文中方法识别故障时,试验对象在一年内的电力波动累积时长达到1 025 min,与其他3种方法相比,降低了40%以上。试验结果充分说明文中方法能够显著降低试验对象的电力波动时长,提升试验对象运行的稳定性。
3 结语
基于无人机航拍的山区危险高空高压线故障智能识别方法,通过对山区危险高空高压线图像进行恢复与高压线边缘检测结果进行可疑故障区定位,并通过不同算法识别不同故障。结果显示,文中方法能够准确识别高压线故障,提升山区危险高空高压线路运行的稳定性。