油气行业智能巡检机器人应用现状综述
2021-12-21张星陈逸王立学张金亚
张星,陈逸,王立学,张金亚
(1.国家管网集团北京管道有限公司,北京 100101;2.中国石油大学(北京)机械与储运工程学院,北京 102249)
随着经济的不断发展,人们对油气的需求日益增多,为了满足巨大的需求,我国每年都会大量的新建或者扩建油田。为了保证油田的稳定生产,油田巡检是必不可少的。目前,主要采用人工巡检与监控技术相结合的方式,由站内工作人员定期检查设备损坏以及管道泄漏情况。然而,人工巡检方式存在很多无法解决的弊端,劳动强度较大但工作效率却很低,在雨雪等天气条件下,会受到影响,而且工作人员重复相同的工作,容易产生不良情绪。视频监控系统也有很多不足之处,存在盲区,很难实现全方位覆盖。另外,由于摄像头数量特别多且系统比较复杂,因此经常会发生故障,维护起来比较困难。近几年,国家大力实施自动化降压减人、机械化更换人的工作方针,机器人技术在我国发展迅速,越来越多成本低、效率高、可靠性高的智能巡检机器人被设计和研制出来,并逐步广泛地应用于油气行业,替代人工巡检,弥补了人工巡检存在的一些不足。本文简单介绍了智能巡检机器人的结构组成和工作原理,通过分析巡检机器人的研究现状,找出存在的问题,并提出对未来的展望。
1 智能巡检机器人概述
智能巡检机器人是一个融合多种计算机技术的复杂系统,在各种传感器的协作帮助下,可以检测设备的实时状态,并开展相应的工作,为工作站的员工减轻负担。智能巡检机器人使用范围很广泛,有许多种类型,比如油气工作站的巡检机器人、廊道的巡检机器人、变电站的巡检机器人等。智能巡检机器人一般由传感器、探测器、摄像头和其他辅助装置组成。目前投入使用的智能巡检机器人多数是轮式驱动和履带式驱动底盘,轮式驱动移动速度快,但只能在平坦的路面上行驶,履带式驱动可以跨越障碍物,不过速度较慢。
油气工作站智能巡检机器人有以下功能:通过高清摄像头采集图像和视频并传输到后台存档;借助红外测温仪,反映工作站设备的温度分布情况,方便工作人员找出存在的问题,避免发生故障;通过激光甲烷检测仪,能够及时发现天然气泄漏位置,让工作人员进行修补工作;依靠超声波传感器,定位并识别各种障碍物,确保在巡检时能够避开障碍物,防止自身受到损坏;在互联网的帮助下,获取工作站周围的天气、温度和风速等相关信息,切换不同的工作模式。
2 压气站智能巡检机器人研究现状
智能巡检机器人最早使用于电力行业,早在20世纪90年代,东京电力公司和日本三菱公司联合开发了变电站巡检机器人,通过红外热像仪和数字图像采集装置,获取变电站内的信息,如图1所示。2008年,巴西圣保罗大学开发研制了一种用于变电站内部温度监测的移动式机器人,体积和重量都比较小,易于操作,红外热成像仪通过架设在变电站上面的高空轨道移动,如图2所示。美国自主研发的变电站检测机器人,能够自动对电力设备进行红外检测,并使用检测天线定位局部放电的位置,如图3所示。2013年,加拿大研制出一种既可以检测也可以操作的机器人,拥有视觉和红外检测的功能,而且能够进行远程遥控,如图4所示。

图1 日本早期研制的 变电站巡检机器人
图2 巴西圣保罗大学研制的备热点监测机器人

图3 美国电力巡检机器人
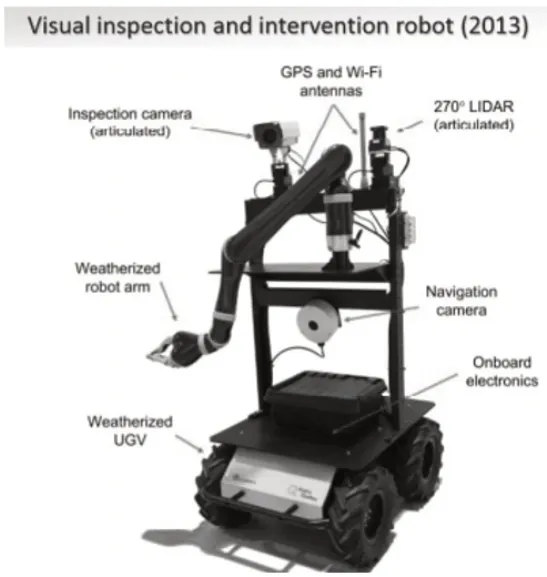
图4 加拿大检测及操作机器人
国内对智能巡检机器人的研究起步较晚,但发展十分迅速。2004年,我国自主研发的第一台巡检机器人诞生。2007年,山东电力研究院的鲁守银等深入研究了智能巡检机器人系统的总体结构,并基于摄像机、高性能定向MIC等传感器,给出了实现巡检机器人图像识别及温度测量等功能的方法,提高了变电站设备运行的安全性。中国石油大学的矫德余在控制硬件设计中,使用ARM嵌入式系统和Linux操作系统,让巡检机器人系统更加智能化,为后续复杂的应用提供了条件。电子科技大学的邹其雨设计了SIPR数据采集及监控系统,提高了工作站设备维护和检测的自动化水平。
近几年,油气行业巡检机器人发展迅速。2018年中国石油首台巡检机器人在长庆油田采气四场使用,以电动四轮驱动,配有360°转动的摄像头,可以在晚上使用,装配气体检测仪和声音采集装置,实现了气、声、光三项数据收集和各类危害风险的自动化预警,如图5所示。中卫站的第二代智能巡检机器人可以实现设备状态智能监控、数据智能采集分析、及时报警等功能,如图6所示。西安市油气田智慧装备工程技术研究中心研发的第二代5G激光机器人,通过激光雷达导航,利用激光甲烷检测仪和红外线甲烷检测仪检测工艺区甲烷含量,在红外热成像仪和摄像头的帮助下检测设备温度及仪表读数,同时将采集的图像和数据,通过无线传输系统发送到控制中心,如图7所示。北斗油气站场智能巡检机器人,通过北斗精准定位、三维激光SLAM建模,拥有无人驾驶自主避障行驶和精准定位能力,可以轻松完成路线规划且多任务自主执行,如图8所示。
图5 长庆油田巡检机器人

图6 中卫站巡检机器人

图7 第二代5G激光机器人

图8 北斗油气站场智能巡检机器人
3 智能巡检机器人在实际应用中的不足
3.1 识别问题
智能巡检机器人在进行巡检工作时,是依靠相应的传感器对各种障碍物进行感应,从而避开障碍物。但在具体使用过程中仍存在一些问题,比如智能巡检机器人可能将一些设备识别为障碍物,那么操作人员就无法获取这些设备的信息,会影响后续的工作。
3.2 测温问题
智能巡检机器人进行测温工作的时候,一般是按照工作人员事先设计好的路径行走,无法全方位的对设备进行温度测量,又因为站内各种设备的存在,有些区域工作的机器人只能在相对较远的地方进行温度测量,导致测量结果不够精确。另外,在下雨或者下雪的情况下测温工作也会受到影响。因此,巡检机器人只能对设备进行简单的温度测量,无法保证测量温度的准确性。
3.3 读取数据问题
一般情况下智能巡检机器人配备的摄像头是可以调节焦距的,其读取仪表上的数据比人工巡检人员的目测相对要准确一些。智能巡检机器人通过调节焦距可以把距离较远或较高的仪表界面拍摄为清楚的图片并传输到后台进行保存。但是在长时间使用后,摄像头会变脏,机器人又不能自动清洗,仪表检测和读取数据就会受到影响。除此之外,也时常发生摄像头对焦不准确的问题。
3.4 续航问题
目前投入使用的智能巡检机器人持续工作时间只有6-8小时,续航能力太差,一旦电量耗尽,操作人员就要将它回收充电,充电结束后又要重新进行设置,浪费了很多时间和精力。如果工作人员没有发现巡检机器人电量耗尽,那么机器人将会一直停留在那。
4 结语
油气行业巡检机器人在最近几年迅速发展,它的工作效率比人工巡检高得多,而且在恶劣的天气条件下依然可以正常工作,是我国油气行业智慧化发展的必然趋势。然而,智能巡检机器人也存在很多问题,针对这些问题,未来可在以下方面发展:(1)革新SLAM 算法,使得定位和导航更加准确,更加简单,尽量减少识别错误,保证巡检机器人正常工作。(2)加强一些关键技术的研究。如红外测温技术,实现温度的精准测量。(3)添加自动清洗装置以及更好的焦距调节系统,让拍出的图片或视频更加清晰。(4)搭载更多类型的传感器,获取各种各样的设备状态信息。(5)机器人更加智能化,可自主解决发现的问题。
