基于机器视觉的智能垃圾分拣机器人的设计
2021-12-21周旭华伍懿美黄晓茹翁嘉欣
周旭华,伍懿美,黄晓茹,翁嘉欣
(河源职业技术学院,广东 河源 517000)
0 引言
随着科技的发展和进步,人们的生活水平逐渐的提高,科技产品的使用也越来越普及,一切都向着智能化发展[1-3]。现在,智能机器人的数量和适应场景的复杂性也在增加,这也显示出对智能机器人的精确性,耐用性和灵活性等性能有更高的要求。机械臂技术的应用已越来越普及,已逐渐渗透到军事、航天、医疗、日常生活及教育娱乐等各个领域,慢慢取代了人类的劳动,尤其是代替人不能到或不适宜去的、有危险的环境中,工业自动化对机器人的智能化水平依赖也越来越高,机械臂的发展越来越受到重视[4-5]。
本文设计了一种以AT Mega328(Uno)为主控元件的六自由度机械臂智能垃圾分拣机器人,包括硬件、软件和机械等部分,能够实现上位机和下位机的通信及控制,本文制作的样机能够满足高职院校汽车智能化专业的实训教学,通过对样机进一步优化,还能应用在货物搬运、智能巡逻等领域,该机器人的研究符合我国人工智能技术的政策发展趋势,具有很好的实用价值,具有很好的推广应用前景。
1 智能垃圾分拣机器人总体设计
垃圾的分类有很多种,本文设计利用颜色来代替不同种类的垃圾[6-8]。智能垃圾分拣机器人系统的主要结构为机械臂,视觉功能模块和蓝牙通信技术,在面对不同场合需求时,需要设计不同的动作组来实现机械臂的运动路径,也就是说控制各个舵机的转动角度,本系统视觉功能模块设计中,利用星通科技提供的OpenMV 视觉模块来完成物体颜色识别,在编程中设计三组颜色(红黄绿)来代替三种类型的垃圾,通过OpenMV 摄像头的识别来检测目标物体,最终将颜色信息通过蓝牙模块传递给基于Arduino单片机的开源舵机控制板,从而实现机械臂的颜色自动分拣。
设计的智能分拣机器人,首先由视觉模块先完成颜色识别功能,同时设计机械臂的动作组,视觉模块识别物体颜色是否为目标颜色,如是目标物体,则将结果发送给机械臂的控制板,控制板根据所得的信息进行控制机械臂做出对应的动作组,整体设计流程图如图1 所示。
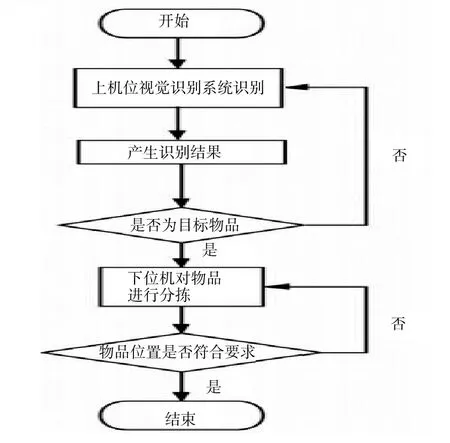
图1 系统结构框图
2 硬件设计
2.1 硬件结构设计
本系统主要有四个模块:一是机械臂的主控模块;二是机器的视觉模块;三是机械臂模块;四是蓝牙通信技术。使用Arduino 编程的开源舵机控制板控制机械臂操作的运动,并连接蓝牙模块与OpenMV视觉模块进行串口通信。其系统的硬件设计框图如图2 所示。
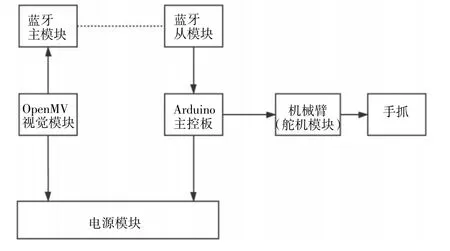
图2 系统的硬件设计框图
2.2 硬件电路设计
硬件部分包括OpenMV 模块1 个,蓝牙模块2个,Arduino 控制板1 块,数字舵机6 个,机械爪1个,旋转底座1 个,U 型支架4 个,锂电池1 个。整体设计硬件电路及实物如图3 所示。
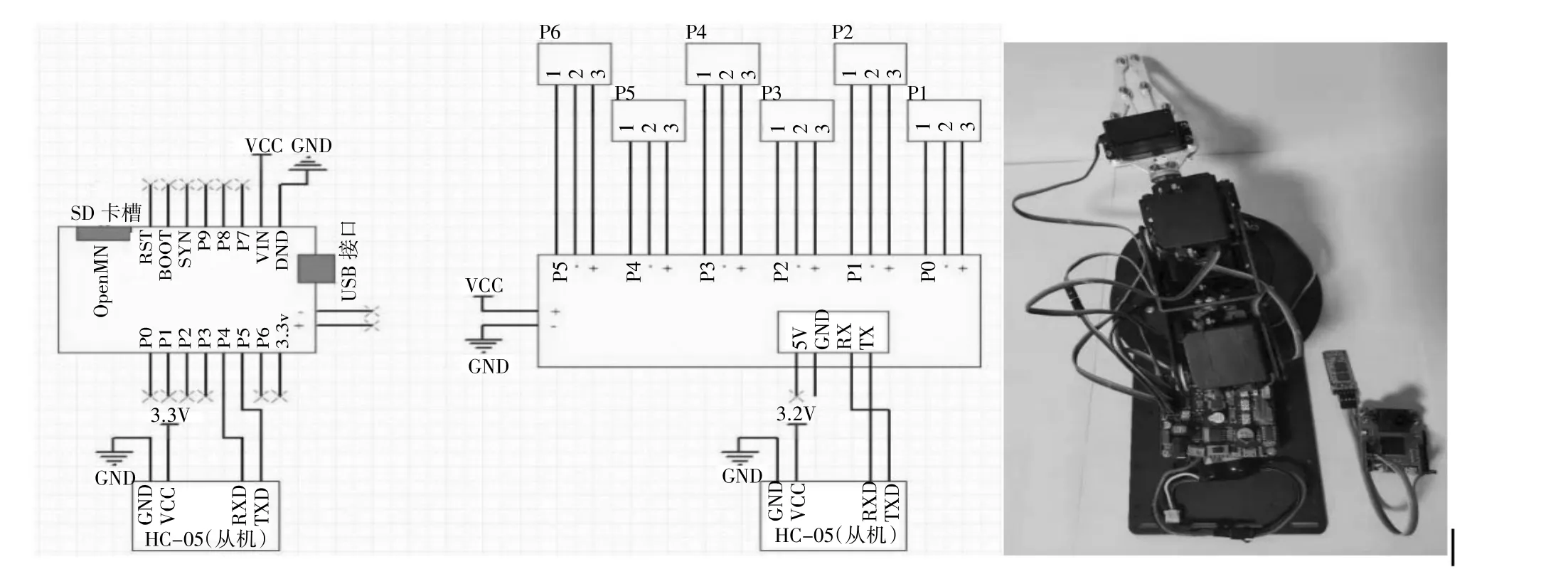
图3 整体硬件电路图及实物图
3 软件设计
智能分拣机器人整体的软件设计开发环境有Arduino IDE 和OpenMV IDE。这两个软件系统的共同特点就是拥有丰富的开源功能代码库和通俗易通的编程操作。本文主要通过Arduino 编程来控制舵机的转动和连接蓝牙,从而实现机械臂的动作操作。通过OpenMV IDE 编程来对物体进行颜色识别。
3.1 蓝牙模块
蓝牙模块程序设计流程图及部分程序如图4 所示。
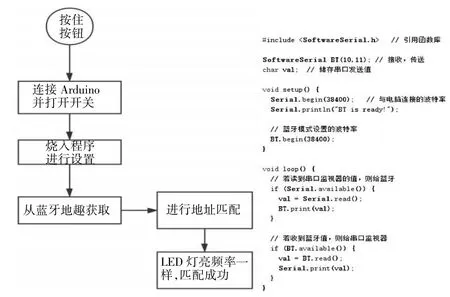
图4 蓝牙模块程序设计流程图及部分程序
3.2 机械臂模块
通过Arduino 编程来控制舵机的转动,从而实现机械臂的动作操作。其机械臂程序流程图如图5 所示。
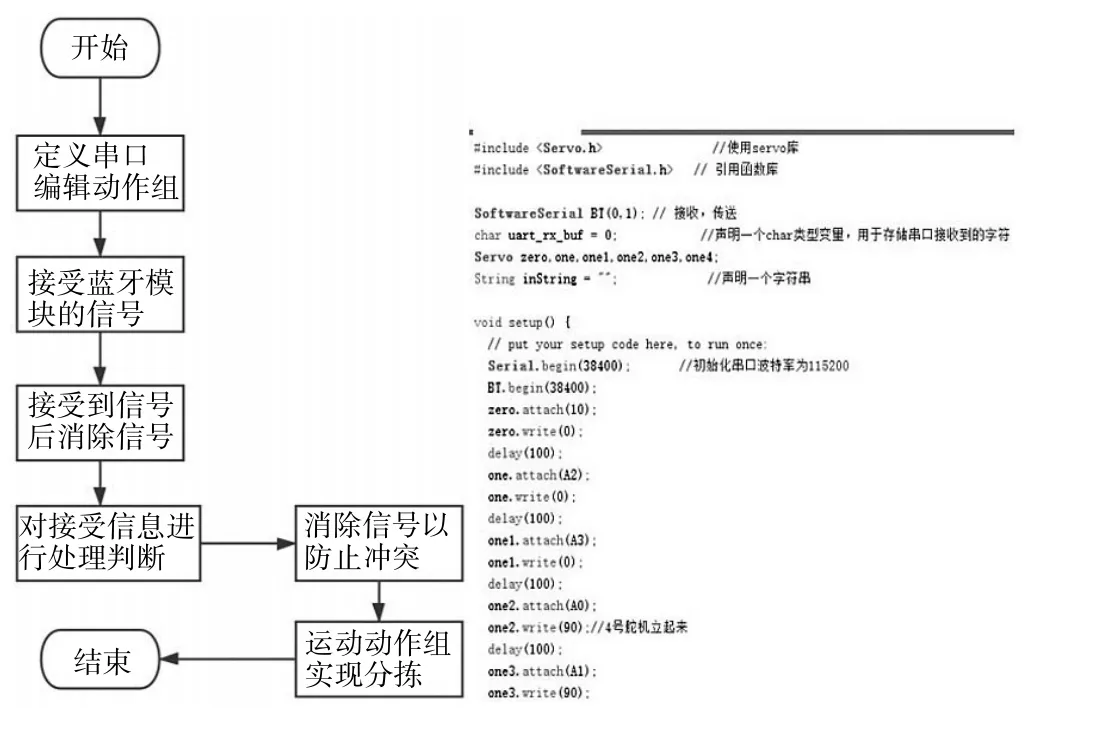
图5 机械臂模块程序设计流程图及部分程序
3.3 视觉模块
通过OpenMV IDE 编程来对物体进行颜色识别,将识别的颜色结果输出给Arduino 控制板,当识别到红色物体则发送“red”,绿色“green”,蓝色“blue”,以字符串的形式由蓝牙模块发送出去,然后Arduino 板从蓝牙从模块中读取,进行判断是否为目标颜色,从而实现机械臂的分拣动作。其视觉模块颜色识别部分程序流程图如图6 所示。
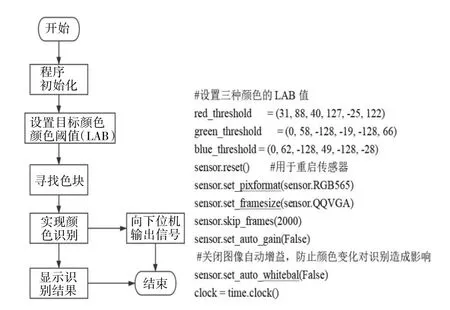
图6 视觉模块颜色识别部分程序流程图级部分程序
4 测试
测试部分主要检测OpenMV 视觉模块识别目标颜色是否正确以及检测机械臂是否能正确抓取。首先将符合设定颜色的积木进行位置的摆放,并指定最终放置目标物体的位置。当视觉模块检测到目标颜色时,从IDE 界面中摄像头的图像里能看到,目标颜色的物体被矩形方框框起来,如图7 所示。
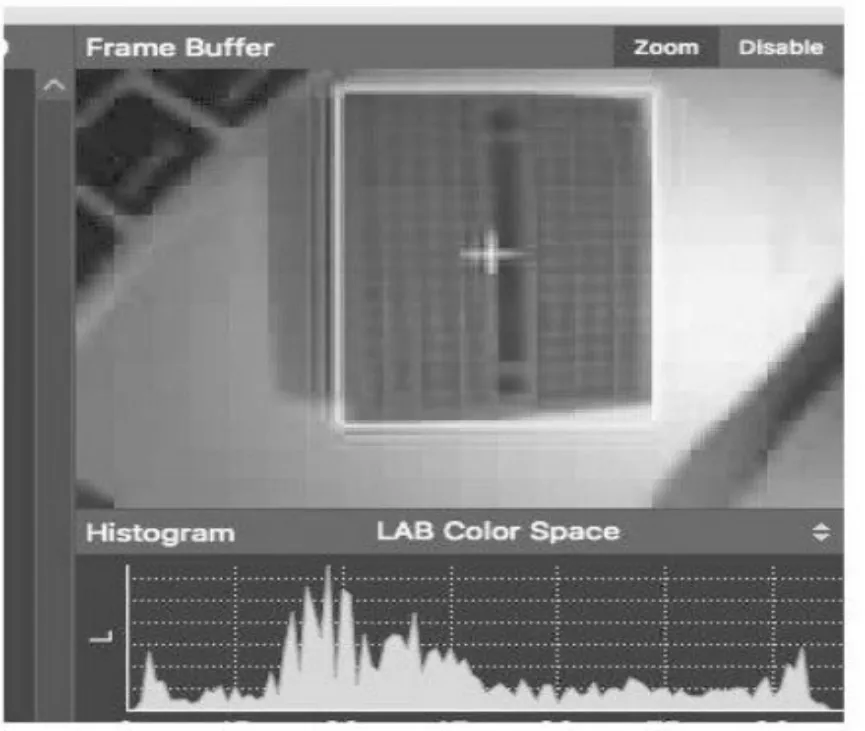
图7 视觉模块识别目标颜色
经过多次的测试,智能分拣机器人总体的性能是良好的,OpenMV 摄像头获取的图片后处理的信息基本是有效的,能把目标物体的颜色信息通过蓝牙串口传送至主控板,主控板获取的信息后,能够有效准确的控制机械臂进行抓取目标物体,机械臂抓取后能正确的将物体放置在指定的位置。但是OpenMV 在进行识别物体颜色时,如果背景颜色和目标物体的颜色过于接近的话,那么则会出现多个色块识别的情况,不能分离出背景和物块。如果在实验环境下光照过强或着过暗,那么识别的物块颜色可能会有点偏差。
5 结论及应用
设计了一种以AT Mega328(Uno)为主控元件的六自由度机械臂智能垃圾分拣机器人,包括硬件、软件和机械等部分。文中给出了系统的硬件设计方案以及流程图,同时给出了软件系统设计方法。系统实现了上位机通过蓝牙发送指定字符串、机械臂通过蓝牙接收字符串和控制机械手臂的功能,并能实现机械臂回到初始位置,在设计时,由于需要测量的距离范围固定,采用了量尺测量法。软件主要分为颜色识别模块和无线通信模块、数据处理模块这三大模块,软件的这种“自顶向下”的模块化软件编程方法,能使软件的结构更清晰,并有利于软件的调试和修改。经过调试,该机器人能够实现发送指定字符串到机械臂然后机械臂工作。
目前,该机器人已经应用于我校汽车智能化专业的实训教学中,能够满足基本教学,在将该机器人的硬件和软件部分进一步优化,还能应用在货物搬运、智能巡逻等领域,该机器人的研究符合我国人工智能技术的政策发展趋势,具有很好的实用价值。
