基于局部密度预测的传输参数自适应拥塞控制策略
2021-12-20胡晓辉
乔 钰,胡晓辉,曹 乐
(兰州交通大学电子与信息工程学院,兰州 730070)
0 概述
车载自组织网络(Vehicular Ad-hoc Network,VANET)是智能交通系统的核心技术,旨在提供安全舒适的交通道路行驶环境,保障车辆驾驶人员和乘客的生命与财产安全,降低意外交通事故的发生概率。专用短程通信(Dedicated Short Range Communication,DSRC)是VANET 中使用的一组标准和协议[1]。VANET 包含2 个单元:路边单元(RSU)和车载单元(OBU),这2 个单元之间形成2 种通信方式,即车对车(V2V)和车对基础设施(V2I)[2]。近几年研究人员开发了许多安全应用程序用于VANET,这些程序通过定期交换信标消息以缩短对事故的响应时间,保障行车的便捷性和安全性[3]。VAENT 环境中车辆节点的移动速率高从而导致网络拓扑结构变化快,复杂的交通环境也会对通信质量造成影响,这些特点导致VANET 性能下降。尤其是在交通流密度大的环境下,信道的争用会越来越严重,当节点数目到达一定程度之后,信道产生拥塞,造成传输延迟增大,数据包丢失,引起网络性能急剧下降。因此,必须设计控制策略,控制车辆通信范围内的节点数和消息传输速率来解决信道拥塞问题。
由于信标消息仅通过控制信道,采用“竞争”的机制进行传输,因此为保障消息及时可靠地传输,研究人员做了大量的工作以解决信道拥塞的问题。文献[4]提出动态拥塞控制方案作为广播安全消息的一种手段,确保将安全消息及时可靠地传递给网络中的邻居节点。该方案分为拥塞检测和拥塞控制2 个阶段,拥塞检测阶段分为基于事件驱动的检测和基于测量的检测,前者通过监控事件驱动安全消息并决定在检测到或生成事件驱动安全消息时启动拥塞控制,后者定期监测信道使用状态,并将信道利用率划分为不同的级别。拥塞控制阶段通过基于消息起源的队列冻结以及通过调整竞争窗口大小的方法控制信道拥塞。文献[5]针对VANET 环境下的信道资源分配问题提出一种网络效用最大化模型,构建传输功率固定条件下无线信道资源分配的优化问题,并利用分布式拥塞控制算法解决该优化问题,使网络效用最大化,保障通信过程中平均时延较小和数据分组投递率较高。文献[6]对分布式拥塞控制算法进行了优化,文中引入优先级的思想,为MAC传输队列中的信标消息赋予较高的优先级,并利用LIMERIC 算法提高消息的传输速率。文献[7]提出了一种非合作博弈模型,基于数据传输速率、车辆的优先级和争用延迟引入了效用函数,其基于车辆的发送速率、最大争用延迟和优先级3 个参数,使用牛顿-拉夫森法来调整消息的数据速率,从而缓解信道拥塞,这是每辆车的效用功能的一部分,以实现所需的公平性。文献[8]基于给定车道上车辆的速度和密度建立了一种动态聚类模型,最大限度地降低网络开销,在降低车辆速度的同时确定车辆密度,这有助于避免网络拥塞,并可以保持更好的网络稳定性。文献[9]基于模糊逻辑提出了一种智能自适应信标速率控制算法,将车辆状态作为模糊决策系统的输出,以便根据交通系统的状态调整信标速率。文献[10]提出了一种基于模糊逻辑的车联网自适应功率控制策略,该策略通过模糊逻辑推理,得到满足90%数据包递送率(Packet Delivery Ratio,PDR)的真实传输范围,并根据与理想PDR 之间的误差自适应调整传输功率。文献[11]提出一种多度量功率控制方法,该方法基于应用程序的要求和信道状态调整传输功率,在维持信道处于良好水平的状态下,保证车辆的传输范围较大。文献[12]提出一种基于信道预测的协同数据分发调度策略,该策略采用递归最小二乘算法基于车辆的位置预测信道负载,有效地减少了数据分发延迟并提高了网络吞吐量。文献[13]采用局部密度预测的方法结合传输参数自适应控制拥塞,该算法依赖车辆的局部密度信息来执行传输参数自适应,在保证边际碰撞率的同时满足大多数VANET 应用程序所需的感知水平。
目前大部分研究都是以MAC 层的不同信息作为无线网络拥塞的度量指标来进行相应的自适应功率或速率控制操作,从而达到控制信道负载的目的。一方面,这种方法不能提前避免拥塞,当信道发生拥塞后需要消耗一定的时间从拥塞状态进行恢复;另一方面,所提出的方法都是对信标消息传输参数的单一调整,具有一定的局限性。上述局部密度预测算法仅根据接收到的信标数量判断当前车辆邻居节点数,但在密集网络环境下,数据包容易丢失造成车辆无法接收到邻居车辆的信标消息,导致局部密度的预测结果不够精确。
针对上述研究中存在的问题,本文提出一种基于局部密度预测的传输参数自适应拥塞控制策略。在车辆识别来自邻居节点的信标消息后,在车载密度计算模块中根据单位时间内接收数据包和碰撞数据包的数量预测短期内邻居节点的数量,并在每个监测阶段结束时对预测值与理论密度值进行比较,利用这2 个参数判断是否启动自适应过程。在此基础上,通过信道忙时比率(Channel Busy Ratio,CBR)评估当前信道负载大小,并结合局部密度自适应调整信标的传输参数,从而达到提前避免信道拥塞的目的。
1 传输参数自适应算法及分析
1.1 系统模型
传输参数自适应拥塞控制策略根据网络密度的变化动态调整信标传输参数。该策略在每个控制信道间隔(Control Channel Interval,CCHI)结束时根据信道状态更新传输参数值,并在下一个CCHI内以该值广播信标消息。在车辆局部密度增大的情况下,车速逐渐降低,此时为保证车辆之间能够及时地交换消息,应提高信标的传输速率同时降低传输功率以防止信标碰撞;反之,在车流量密度稀疏的情况下,车辆速度的增加导致碰撞时间减小,此时应增大车辆的传输范围。系统模型如图1所示。
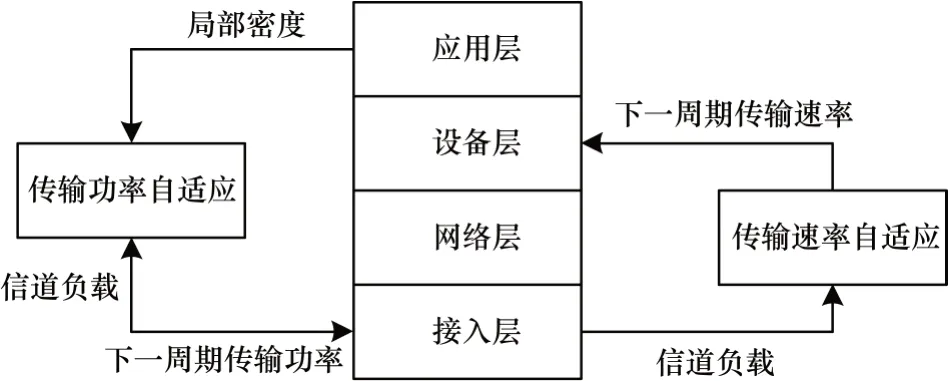
图1 传输参数自适应系统模型Fig.1 Transmission parameter adaptation system model
1.2 假设条件
假设每个车辆节点都配备导航系统,并且具有IEEE 802.11p[14]的通信技术和运算能力。车辆周期性地广播信标消息,其中包括ID、位置、速度、方向、当前位置邻居节点数目等相关信息。根据文献[15]可知,DSRC标准中定义了信标结构并且保留了空闲字段用于特殊应用,因此,可以在信标中添加额外的信息,即本文方案中目标车辆的邻居车辆节点数目。
1.3 局部密度预测方法
局部密度预测机制从宏观角度对交通流密度进行估计,以车辆自身对周围环境参数的预测为基础,对短期内目标车辆周围的邻居车辆密度的变化进行预测。在启动传输参数自适应方案之前,需要监测信道利用状态并确认自适应的必要性。信道拥塞是车辆节点之间进行大量且频繁的数据交换造成网络负载过重的结果,因此,根据周围节点的数量来判断是否启动信标自适应方案是一种简单而有效的方法。
由于VANET 节点具有高度动态性,因此道路交通状况变化速度快,使用预测机制的主要目的是反映网络的实时状态。将目标车辆干扰范围内的邻居节点数定义为车辆局部密度,以节点为中心执行预测机制。VANET 环境中每个车辆节点在CCHI 结束时,基于自身所接收到的数据包数量估计当前车辆的周围邻居节点数。
当信道处于拥塞状态时,数据包碰撞是不可避免的。可以基于数据包的接收数和碰撞数来估计邻居节点的数量[16]。首先在每个CCHI 结束时对数据包数量进行统计;然后计算一个周期内接收包与碰撞包的数量之和,并结合平均信标速率与相邻节点的数量呈反比的关系计算车辆局部密度;最后依据密度预测值与密度阈值的比较判断是否调整传输参数,以防止控制信道内信标消息数量过多而导致信道负载过重。
局部密度预测机制模型如图2 所示,其中:干扰范围内的车辆B、C、D 均为A 车的邻居节点;车辆B、C 在车辆A 的通信范围内而车辆D 在车辆A 的干扰范围内;所有车辆均周期性地广播消息;D 车辆的消息会被A 车视为碰撞信息。
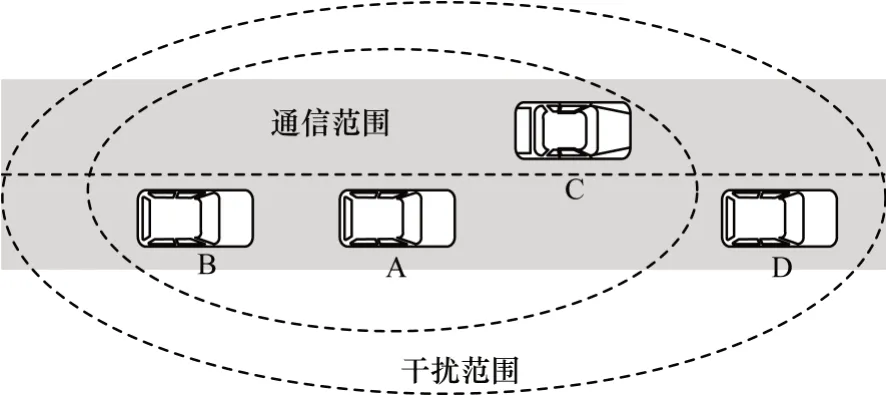
图2 局部密度预测机制Fig.2 Local density prediction mechanism
在第i个CCHI 内,车辆可以检测出信道内接收包的总数为Pi_rp,碰撞包的总数为Pi_cp,邻居节点的平均信标速率定义为Vi_avg。平均信标速率可由式(1)计算[17]:

其中:C表示信道容量;Bsize表示信标消息的大小;N为当前车辆的相邻节点数量;β是一个常数,范围为0<β<1。
信道内的碰撞包可分为以下2 种类型:一种是接收车辆无法解码来自干扰范围内的数据包,将这类碰撞包的数量定义为Pi_ncp;另一种是当两辆车位于目标车辆的通信范围内并且同时广播数据包,此时就会产生碰撞,将这类碰撞包的数量定义为Pi_rcp。因此,在第i个CCHI 内信道中碰撞包的总数为:

文献[17]提出由于同一时间广播数据包导致发生碰撞的碰撞包的数量Pi_rcp与一个周期内监测到的碰撞包总数量Pi_cp的比例是一个常数,用ε表示,即:

因此,目标车辆干扰范围内邻居车辆的节点数为:

载波侦听多路访问/冲突检测(Carrier Sense Multiple Access/Collision Avoidance,CSMA/CA)是IEEE 802.11p 采用的一种MAC协议[18]。以CSMA为基础的MAC 协议采用随机接入机制,当局部密度逐步增大时,节点很容易发生碰撞,进而引起更多次的退避。由式(4)可以看出,当接收包和碰撞包的数量增多时,意味着邻居车辆的节点数增多。本文提出一种传输参数自适应拥塞控制机制,根据局部密度调整信标传输周期,以减少高密度场景中的信标负载,降低节点碰撞的概率。
控制信道带宽资源受限导致一个CCHI 内能够承载的数据量有限。由于所有信标大小是固定的,因此可以将信道容量从数据单元转换为一个CCHI内对信道的访问次数,将访问次数映射到一个CCHI内“竞争”访问信道但不会造成拥塞的最佳车辆数。VANET 环境中信标速率最低要求为10 Hz,信道的最大利用率不超过一个CCHI 的60%,且一个CCHI为48 ms[19]。因此,一个CCHI 可用时间为:48 ms×60%=28.8 ms。
每一个信标消息的大小为固定的256 Byte,在控制信道中传输需要1 ms[20],则在一个CCHI 内 可以广播消息的车辆数为,即理论最优局部密度为28。根据车辆局部密度的预测值与最优局部密度的比较判断是否启动信标传输参数自适应过程。
1.4 传输参数自适应调整
VANET 环境中安全应用程序的运行依赖于每个车辆节点向邻居车辆广播信标消息,这些信标消息均通过控制信道进行传输。因此,每个节点只有通过“竞争”才能访问控制信道广播信标消息。目前,VANET 中的拥塞控制主要通过调整传输速率、传输功率和竞争窗口3 个参数。控制消息传输速率的主要方法就是控制消息从源节点处的产生速率,消息的传输速率越高,车辆节点对周围的环境感知越精确。传输功率的控制主要通过增加消息的传输距离,扩大通信覆盖范围,从而改善发送节点与附近节点的通信质量。基于竞争窗口控制的拥塞控制机制主要根据传输的信标消息的优先级设置初始最小竞争窗口,在消息传输过程中,节点根据收到的信标消息维护好邻居节点列表。在一个CCHI 结束时,节点会更新邻居节点列表计算邻居节点个数,并根据其与最小竞争窗口之间的关系,调整最小竞争窗口值。因此,竞争窗口的调整会受到更多的限制,并且VANET 中消息的传输速率和功率是与安全应用运行性能密切相关的2 个参数,所以,多数研究都注重于调整这2 个参数。
1.4.1 算法总体流程
本文提出一种基于局部密度预测的传输参数自适应拥塞控制策略算法LDP-TPA。该算法主要是由局部密度预测方法和自适应调整方法2 个部分组成。首先将网络中所有节点初始化传输速率R和传输功率P发送周期性信标消息;然后调用1.3 节局部密度预测方法,预测下一周期车辆干扰范围内的局部密度;最后调用1.4.2 节传输参数自适应算法,根据当前时刻信道忙时比率及局部密度动态调整信标的传输速率和功率。
1.4.2 传输参数自适应算法
本文采用目前与VANET 信道拥塞相关的研究中广泛使用的,直接反映信道负载大小的评价指标——信道忙时比率(CBR)。信道忙时比率定义为在一个监测时间间隔T内,车辆感知信道处于繁忙状态的时间与总时间的比值,即:

其中:T为一个时间间隔;信道在每个时隙i内被测量一次,T/i为一个时间间隔内的监测次数;ω为信道繁忙指示,当信道繁忙时值为1,反之为0。当CBR 值为0.5~0.8 时,无线网络性能达到最优[21]。本文设置CBR的阈值为0.6。
在速率控制方面,不同速率之间数据包递送率性能差异很大:采用高传输速率能够缩短数据包传输时间,但是数据包递送率低;而采用低传输速率传输时间过长容易造成信道拥塞。所以,应根据当前时刻信道负载大小自适应调整传输速率。
将当前时刻CBR 与当前时刻信标传输速率作为速率自适应算法的输入,在速率调整中采用线性消息速率集成控制方法[22],通过降低速率保持CBR低于预设阈值。车辆节点i在某一次控制过程中的传输速率控制公式为:
第三起:南部某市有一只波斯猫因为地震从阳台上摔下来,瘸了右前腿,成了一只残疾猫。这是本次地震造成的最严重损失。

其中:Rc是信标速率;Rg为满足CBR 阈值的信标速率;α与β为收敛因子,且0<α<1,β>0。
在功率控制方面,由于VANET 环境中传输范围与传输功率一一对应,因此根据车流量密度的不同,应对传输范围自适应调整以保证信标消息能够传递给邻居车辆。同时,在保证大多数车辆能够接收到信标消息的情况下,为避免信道拥塞,应将CBR 维持在阈值之下。
针对上述问题,本文基于局部密度变化和信道忙时比率自适应调整传输功率,由此改善实际的信道负载,提高传输的可靠性和实时性。车辆节点i在某一次控制过程中同样采用线性控制的方式调整传输功率:
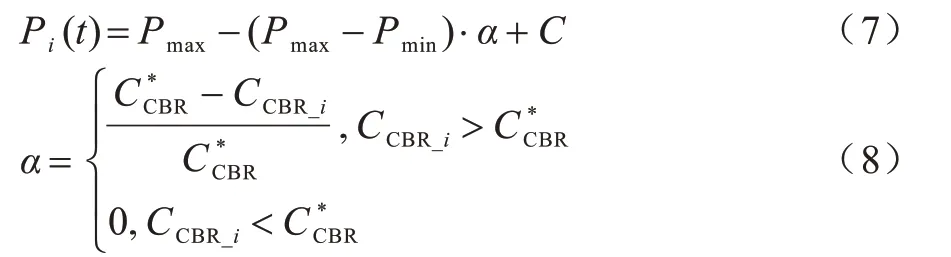
其中:α 为调整因子,根据当前时刻CBR 和CBR 阈值计算;C是一个常量,根据消息的类型决定;Pmax和Pmin分别对应最大和最小传输距离。利用反馈调整的方式来控制在实际信道状态条件下,符合实际情况的功率变化。
车辆之间周期性地交换信标消息的目的是使驾驶员能够增强对行驶环境的认知,缩短对事故的响应时间。为此,LDP-TPA 使用传输功率自适应调整来控制车辆的传输范围。同时,使用传输速率自适应调整来维持信道负载低于阈值,以保证数据包递送率。当局部密度增大时,车辆速度降低导致车间距离缩小。在速率控制模块中,为保障车辆对周围环境的感知处于良好水平,应增大传输速率。在功率控制模块中,根据当前时刻的信道状态调节传输功率,以确保信标消息能够及时传递到邻近的车辆。当局部密度减小时,道路上的车辆均以较高的速度行驶,此时碰撞时间减少。为保障道路交通安全,车辆应以较高的功率传输信标消息,以使信标消息能够尽量传递到较远处的车辆。局部密度减少说明交通流密度稀疏,意味着发送消息的车辆数量减少。因此,通过自适应传输速率控制,在充分利用信道资源的同时维持信道利用处于良好的水平。传输参数自适应算法描述如下:
算法1传输参数自适应算法

2 仿真结果与分析
2.1 仿真参数和环境
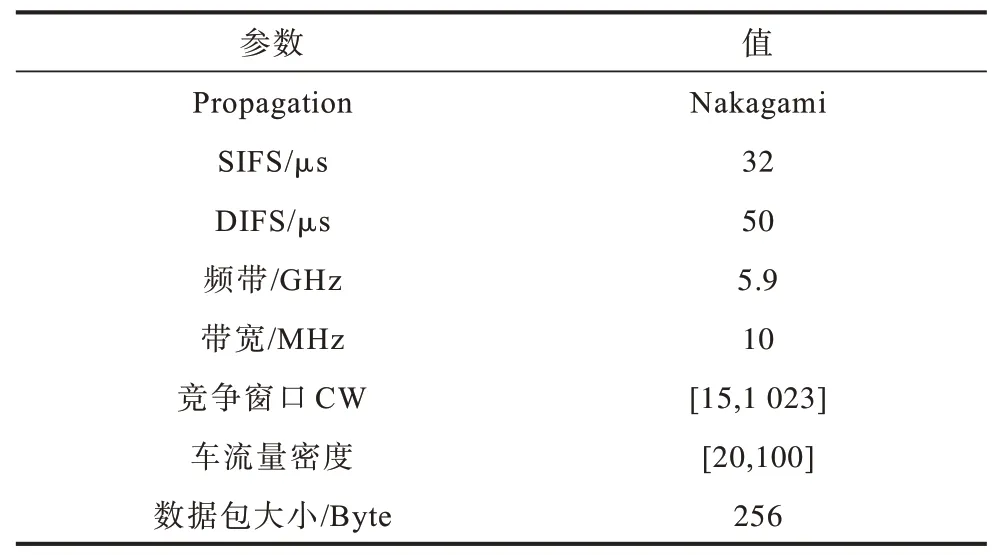
表1 仿真参数Table 1 Simulation parameters
将本文提出的LDP-TPA 算法与文献[6]中提出的速率自适应控制算法和文献[13]中提出的基于利他预测的自适应(P& A-A)算法进行对比,仿真结果基于数据包递送率、消息传输延迟和信道占有率这3 个性能指标。其中:数据包递送率是数据包传输总数与到达目标节点的数据包总数之比;消息传输延迟是将所有数据分组传输到目标节点所需的时间;信道占有率是在一个传输周期内,信道被占用的时间与总时间之比。
当车流量密度发生变化时对提出的基于局部密度预测的传输参数自适应拥塞控制策略进行验证。当车流量密度增大时,控制信道中的信标消息数量增加从而导致信道拥塞,造成数据包丢失,传输延迟较高。针对上述问题,实验设计中应用车辆自身检测到的接收包与碰撞包的数量估计局部密度,根据局部密度预测值判断是否启动传输参数自适应过程,重新调整信标传输参数以降低信道负载。对上述过程进行迭代可以降低信道拥塞程度,从而保障通信过程中数据的可靠传输,同时满足大多数应用所需的感知水平。通过对局部密度的预测调整传输参数,可以预防信道负载过大。
2.2 实验结果及分析
2.2.1 数据包递送率
从图3 可以看出,本文提出的LDP-TPA 算法与速率自适应控制和P& A-A 2 种算法在仿真过程中PDR 随节点密度的变化。在此过程中,3 种算法的PDR 逐渐降低。速率自适应控制算法由于未采用节点密度预测机制,只有检测到网络已经产生拥塞时才进行速率自适应控制,因此该算法的PDR 下降最快。同时可以看出LDP-TPA 算法的PDR 略高于P& A-A 算法,这是因为P& A-A 算法根据车辆所接收到来自邻居节点消息的数量估算局部密度,当通信范围内节点数量较多时,数据包在传输过程中会发生碰撞导致局部密度预测不够准确。LDP-TPA 算法维持PDR 在90%以上,能够保证数据分组的可靠发送,确保了信标消息实时地传输给邻居车辆,从而满足车辆的安全需求,保障交通道路的安全。
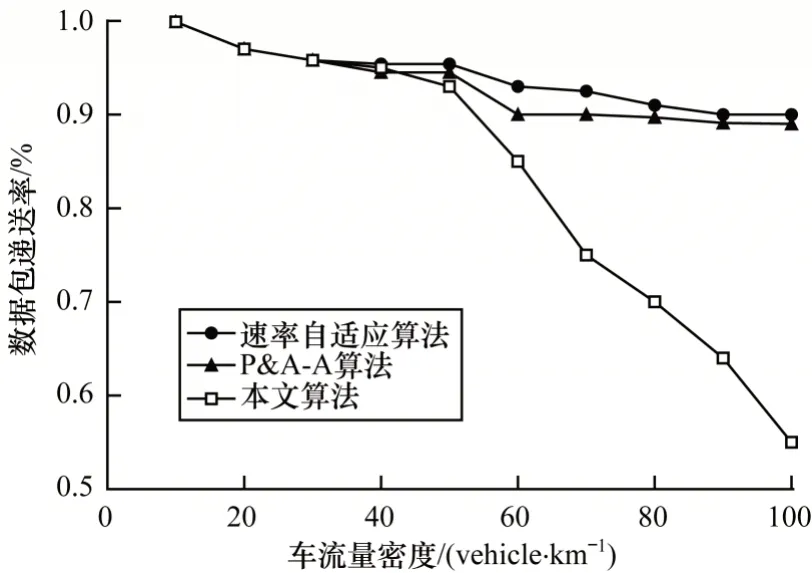
图3 不同算法的数据包递送率Fig.3 Packet delivery rate of different algorithms
2.2.2 消息传输延迟
在密集网络环境中,发送信标消息的车辆数增加导致消息传输延迟增大。将LDP-TPA 算法与速率自适应控制算法和P& A-A 算法进行对比,观察消息传输延迟随车流量密度的变化。实验结果如图4所示。
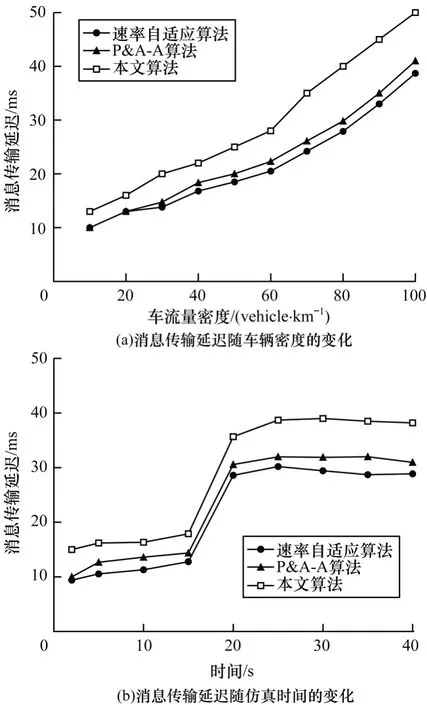
图4 不同算法的消息传输延迟Fig.4 Message transmission delay of different algorithms
如图4(a)所示,在仿真初期由于车流量密度不是很大,3 种算法的消息传输延迟均在10 ms~13 ms。当车流量密度达到30 vehicle/km 时,3 种算法的消息传输延迟均有所增加。随着车流量密度的增加,速率自适应控制算法的消息传输延迟超过了LDP-TPA算法和P& A-A 算法。这是由于速率自适应控制算法速率控制具有滞后性,网络已经产生拥塞之后才进行调控,所以消息传输延迟最高。当车辆密度达到65 vehicle/km 时,速率自适应控制算法的消息传输延迟超过了30 ms,而LDP-TPA 算法在整个仿真过程中将消息传输延迟控制在40 ms 以下且略优于P& A-A 算法。
如图4(b)所示,在前20 s,车流量密度为20 vehicle/km,3 种算法的传输延迟均维持在10 ms~20 ms。在第20 s 时,车流量密度由20 vehicle/km 增加到100 vehicle/km,3 种算法的消息传输延迟均呈现上升趋势。其中,速率自适应控制算法的消息传输延迟最大,而LDP-TPA 算法在车流量密度增加之后,消息传输延迟依然维持在40 ms 以下。
2.2.3 信道占有率
控制信道中消息的数量增多时意味着信道占有率也会相应增加,将LDP-TPA 算法与其余2 种算法在信道占有率方面进行对比,观察3 种算法在通信过程中是否充分利用信道资源。实验结果如图5 所示。
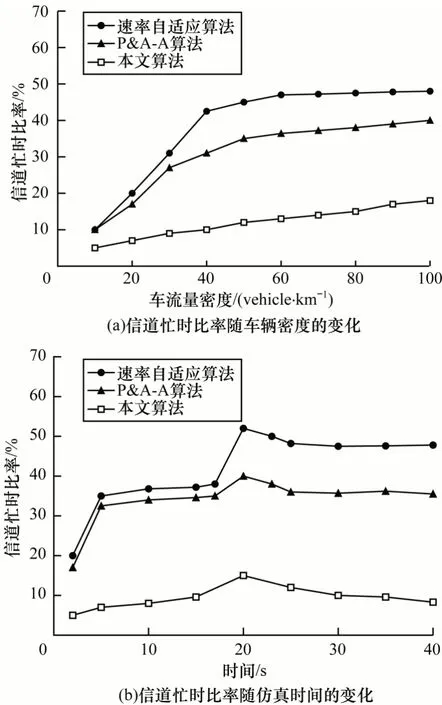
图5 不同算法的信道占有率Fig.5 Channel occupancy of different algorithms
如图5(a)所示,当节点密度增大时,上述3 种算法的信道占有率均有所增加。速率自适应控制算法在整个模拟过程中信道占有率始终较低。但是在车流量密集的区域内,车辆需要更频繁地向邻居节点发送信标消息以保障道路交通安全,较低的传输速率无法满足安全应用程序严格的信标要求,传输速率过低会导致位于通信范围内的邻居车辆无法及时接收到信标消息,且较低的信道占用率表明通信过程中并未充分利用信道资源。LDP-TPA 算法和P& A-A 算法的信道占有率均呈现上升趋势,且高于速率自适应控制算法。但P& A-A 算法对于传输参数的调整并未结合当前时刻的CBR,仅是采用二进制搜索算法的思想,在Tx min 和Tx max 之间寻找“最优”的传输参数,以使信道达到最优负载状态。因此,在这个模拟过程中P& A-A 算法的信道占有率始终低于LDP-TPA 算法。由于LDP-TPA 算法是基于阈值的控制机制,所以信道占有率上升到一定程度后便保持平稳。
如图5(b)所示,在前20 s,由于车流量密度较低,因此LDP-TPA 算法和P& A-A 算法的信道占有率均较低。在第20 s 时,由于车流量密度的增加,信道占有率迅速增长,在算法的调节下,信道占有率有所下降。但LDR-TRA 算法的信道占有率始终优于P& A-A 算法,对信道资源的利用更充分。
3 结束语
在城市环境车流量密集的区域内,车辆之间频繁地交换信标消息会造成信道拥塞,而现有研究大多只是针对单一参数调整。针对上述问题,本文提出一种基于局部密度预测机制的传输参数自适应拥塞控制策略。通过估算短期内车辆局部密度的变化实时测量信道忙时比率,以评估当前时刻信道负载大小,自适应调整传输速率和功率,在缓解信道拥塞状态的同时考虑满足安全应用最低感知水平。实验结果表明,本文策略能够在保证数据包递送率和传输延迟性能的前提下,提高信道占有率并最大化利用信道资源。然而,在真实的交通环境中,不同场景下每辆车的安全需求并不相同,本文设计的策略只针对信道利用水平,使用时无法做到信道资源按需分配。因此,根据车辆安全需求按需分配信道资源将是下一步的研究方向。
