基于VISSIM的远引调头组织效果研究
2021-12-20邱美华叶丽敏胡爱秀谢长沙
邱美华,叶丽敏,胡爱秀,施 群,谢长沙
(福建农林大学 金山学院, 福州 350002)
随着经济的快速发展,城市交通呈疾速增长的趋势,这也导致城市道路交通问题日益严重.研究发现,交通问题主要集中在交叉口,交通堵塞问题在交叉口尤为突出,这些问题直接导致城市路网的通行能力降低.过去对于交通堵塞问题通常是通过扩建道路规模来满足交通量的增加,然而道路的规模是不可能无限扩张的,通过新建道路的方式是无法从根本上解决问题.因此交通工程研究的方向转移到提高路网的利用率上[1-3].远引调头可以使左转车流分流成路口右转以及路段直行掉头的车流,将某路段超负荷的交通流分担到其他通行能力较强的路段上,从而达到降低路口的延误时间、平衡路口延误与路段延误的目的[4-5].由此可见远引调头技术是一种成本低、见效快的交通管理与交通控制措施,可以有效缓解交通拥堵问题,改善交通运行状况及安全状况.目前,远引调头主要有两种方式:车辆远引到下游中央路段开口调头、车辆远引到下游信号交叉口调头[6-7].研究每种远引调头方式的交通效果具有十分重要的实用意义.
1 车辆远引到下游中央路段开口调头的交通效果
远引调头组织方式往往需要根据道路的实际状况来选择, 当有较长中央分隔带存在时,可在中央分隔的合适位置设置调头开口[8].现在不考虑车辆变道的情况下,对远引到下游路段开口处调头的交通组织效果进行研究.
1.1 车辆运行过程冲突分析
如图1所示在下游中央分隔带开口处调头车辆,其运行过程可以分为四个阶段.
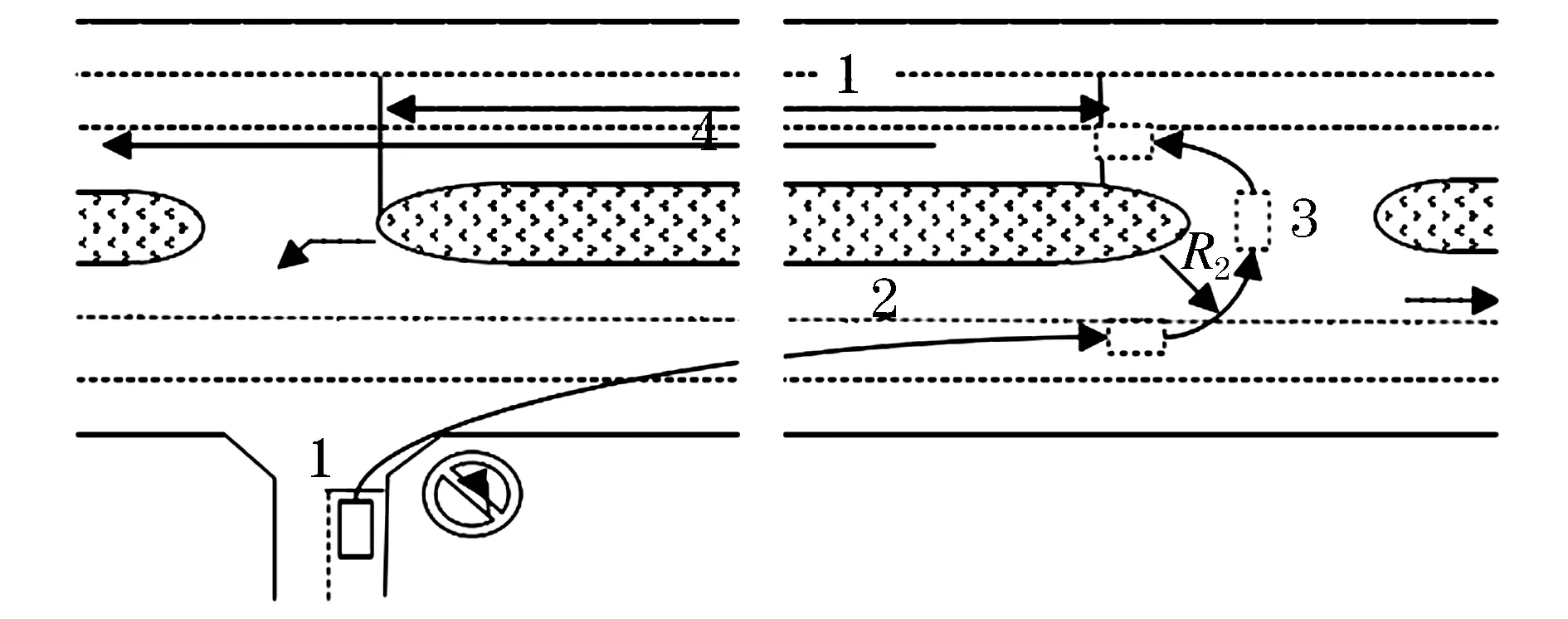
1—在路口停车线停车等待穿插时机;2—等待可插车间隙时机,驶入合流车流,行驶到中央分隔带开口处;3—等待对向直行车流有可插车间隙的出现;4—提速到和主路直行车流车速一致,与主路直行的车流完全汇合
由图2分析可知,行驶的车辆在运行过程中会产生两个冲突:冲突①为由车辆穿插到主路时与外侧的直行的车流汇合产生的合流冲突;冲突②为由车辆向主路移动时与对向直行的车流产生的合流冲突.见图2.
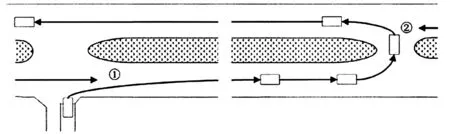
图2 车辆下游中央路段开口调头冲突图Figure 2 Conflict diagram of vehicle making a U-turn at the opening section of downstream central divider
1.2 行程时间模型
通过车辆运行过程分析,用下列公式表示车辆的行程时间:
TTRU1=tru1+tru2+tru3+tru4
(1)
其中:TTRU1为行程时间(s);tru1为在支路停车线等待合流间隙出现的时间(s);tru2为穿插完成到行驶至中央分隔带开口处的时间(s);tru3为在完成tru2后停车等待对向车流中有合流间隙出现的时间(s);tru4为完成穿插行至直接左转过程结束位置的时间(s).
2 车辆远引到下游信号交叉口调头的交通效果
远引调头组织方式主要是在不允许支路交叉口的车流左转驶入主路的情形下设计的一种交通组织方式[9-10].现在不考虑车辆变道的情况下,对远引到下游信号交叉口处调头的交通组织效果进行研究.现介绍两种形式下远引到下游信号交叉口处调头的方式.
2.1 车辆运行过程分析
如图3所示. 在设有专门的左转相位条件下,车辆行驶到信号交叉口位置,根据信号控制完成调头过程.这个过程可以分为四个过程.
如图4所示在该过程中出现的延误主要是在支路处停车等待,等到主路出现可插车间隙的时间和在停车线等待左转相位绿灯时间以及调头处等待对向主路出现可插车的间隙的时间.下游信号交叉口设置有左转专用相位,车流产生了合流冲突①,如图4所示.
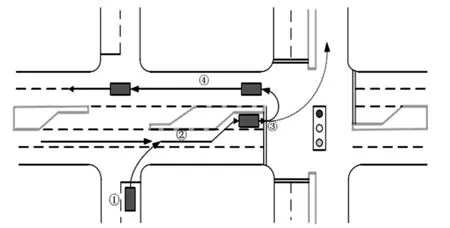
1—等待穿插到主路的可插车间隙;2—行驶到主路并在专用车道停车等待;3—等待左传专用相位绿灯开启;4—转弯加速至对向直行车流的车速.
没有设置专门的左转专用相位的情况下,它的行驶过程可以分为 2 个阶段,如图5所示.
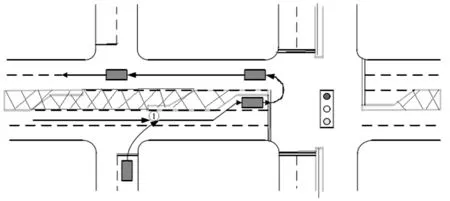
图4 车辆下游左转专用相位信号交叉口调头冲突图Figure 4 Conflict diagram of U-turn at the downstream intersection with special phase signal for turning left
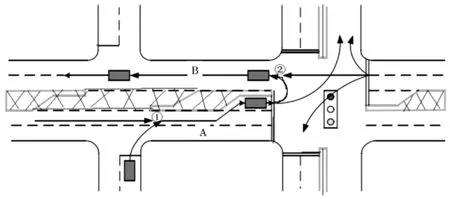
图5 车辆在下游信号交叉口(无左转专用相位)调头过程图Figure 5 Process diagram of U-turn at the downstream signalized intersection (exclusive left-turn phase)
其中:A为支路路口停车线等到主路满足可插车间隙时机后,右转行驶到靠近内侧车道,并行驶到信号交叉口的停车线前进行停车等待;B为信号开启时,根据对向车流安全距离下实现调头转弯,紧接着把速度控制到和汇入的车流速度相同,完成汇合.
从图5分析得出,在上述信号配时控制下调头车辆在运行过程中会遇到①和②两个冲突,①发生在A阶段,并且由行为主体和穿插客体之间产生的合流冲突;冲突②产生于B阶段,由行为主体和对向合流客体之间产生合流冲突.
至此,几种远引调头组织方式的安全性比较结果如表1所示.
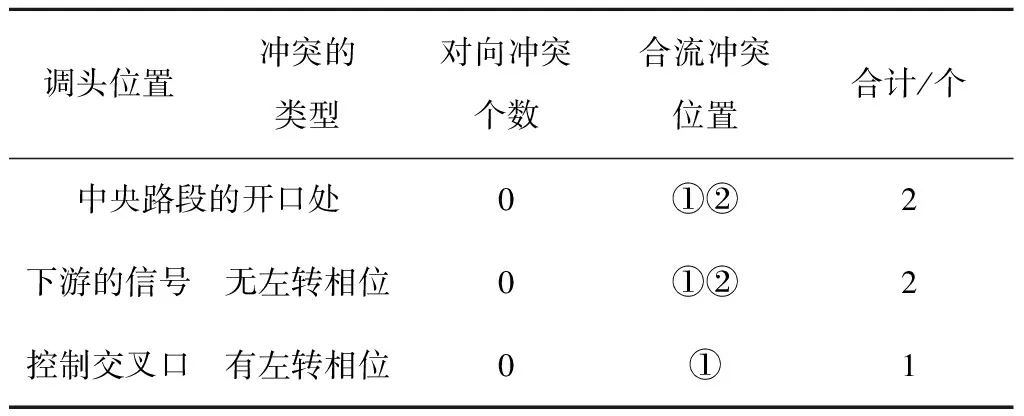
表1 远引调头方式的冲突汇总比较Table 1 Comparison of conflicts in far lead U-turn mode
从表1中可以看到实施远引调头组织方式的冲突点少,在有左转相位的下游信号交叉口完成调头转弯仅产生一个冲突点.故远引调头的组织方式可以减少冲突,但不足之处是行驶长度增加,使交叉口和路段交通流运行状况变得复杂,这就要求设计者在选择时要充分因地制宜,综合评价其运行效果后才可以实施.
2.2 行程时间模型
由车辆运行过程分析可知,可以用下列公式表示有专用左转相位情况下车辆的行程时间:
TTRU=tRU1+tRU2+tRU3+tRU4
(2)
TDRU=tRU1+tRU2
(3)
(4)
其中:TTRU为行程的时间(s);tRU1为车辆等待合流间隙出现的时间(s);tRU2为车辆等待左转绿灯的时间(s);tRU3为车辆行驶到信号控制位置的时间(s);tRU4为左转绿灯开启时车辆转弯行驶到支路口位置的时间(s);l为车辆汇入主路前位置到下游信号控制位置的最短距离(m);Vr为汇入的主路的车速(m/s).
由上述公式可得到车辆的平均延误由和两部分组成,平均行程时间由tRU1和tRU2两部分再加上路段的行驶的时间.
因为车辆远引到下游交叉口对下游交叉口甚至整个路网的通行效率影响较大,所以本论文将重点研究车辆远引到下游信号交叉口调头的交通效果,对于车辆远引到下游中央路段开口调头的交通效果将在课题的后续研究中进行.
3 基于VISSIM的仿真效果分析
3.1 交通数据调查与分析
调查地点:福州金洲南路与亭洲路、凤冈路交汇路段.
道路基本情况:金洲南路为双向8车道,亭洲路为双向4车道(两条非机动车道).主路最高车速为50 km/h,亭洲路到信号交叉口距离262 m.
金洲南路-凤冈路交叉口信号配时:周期时长140 s,交叉口直左转绿灯41 s,黄灯3 s;
交通量情况:交通量调查采用晚高峰小时交通量,调查数据如图6、7所示.
3.2 方案设计
采用控制变量法对两种方案进行模拟仿真,具体如下:
1)保持凤冈路的交通流量稳定,调节金洲南路的交通流量大小.
2)设定金洲南路的交通流量为常数,调节凤冈路的交通流量大小.
通过比较两种方案的评价指标,分析各方案的交通效果.
3.2.1 路网的设计
路网设计主要包括以下几个方面:道路实际情况,交通量组成,实施的方案,信号控制以及一些参数指标等.
1)交通量组成
根据输出结果的需要,采用的交通量分成几组类型.
2)道路的结构
主路金洲南路为双向8车道,次路凤冈路为双向6车道,支路亭洲路为双向4车道.车道宽度3 m,中央设有2 m宽绿化带.
3)交通组织方案
相同的道路现状和预设交通量,不同的是交通流的组织形式,即直接左转和远引调头的两种方式.
4)信号配时
下游信号配时设有专用的左转固定配时相位.
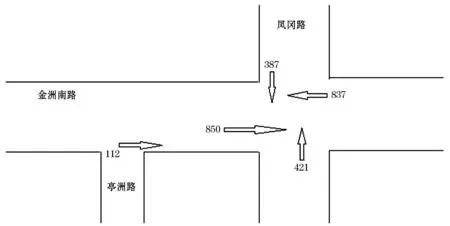
图6 交通流量情况Figure 6 Traffic flow

图7 调查地点卫星图Figure 7 Satellite image of the survey site
3.2.2 仿真运行及评价指标
研究对仿真方案的设计采取3 600 s的仿真步长,仿真运行周期选取3 600 s.主要是对直接左转和远引到下游信号交叉口两种典型组织方式进行仿真比较,将路网中车辆的平均延误、平均行程时间设定为需要输出的评价指标.
3.3 方案比较
方案A:设定凤冈路的车流量为150辆/h,改变主路金洲南路的车流量.
1)交通量配置
亭洲路车流量150辆/h,金洲南路车流取200~1 600辆/h,并且左转占13%,直行50%,右转37%;凤冈路车流满足左转占13%,直行占50%,右转占37%;选用延误和行程时间进行评价.
2)信号配时图如图8所示.
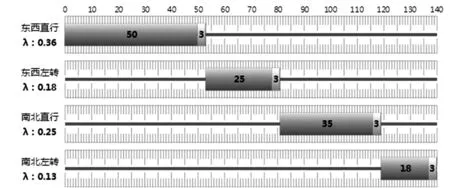
图8 信号配时图Figure 8 Signal timing diagram
方案B:金洲南路车流设定为1 000 辆/h,设计不同的凤冈路车流量.
1)交通量配置
亭洲路车流量150辆/h,金洲南路车流量1 000辆/h,并且左转占13%,直行50%,右转37%;凤冈路车流量设计为70~170辆/h,并且满足左转占13%,直行50%,右转 37%,仿真实验选用延误和行程时间进行评价.
2)信号配时采用固定配时,如图9所示. 仿真过程图及各方案下的效果评价数据如下:
如图10所示,当金洲南路车流量小于1 200辆/h时,直接左转和远引调头两种组织形式对路网的车流总量影响并不大.但当金洲南路车流量大于1 200辆/h时,亭洲路采用远引调头的方式对路网的车流总量影响较大.即主路车流小于1 200辆/h且次路车流不大时,支路采用远引调头的效果较好.

图9 仿真过程图Figure 9 Simulation diagram
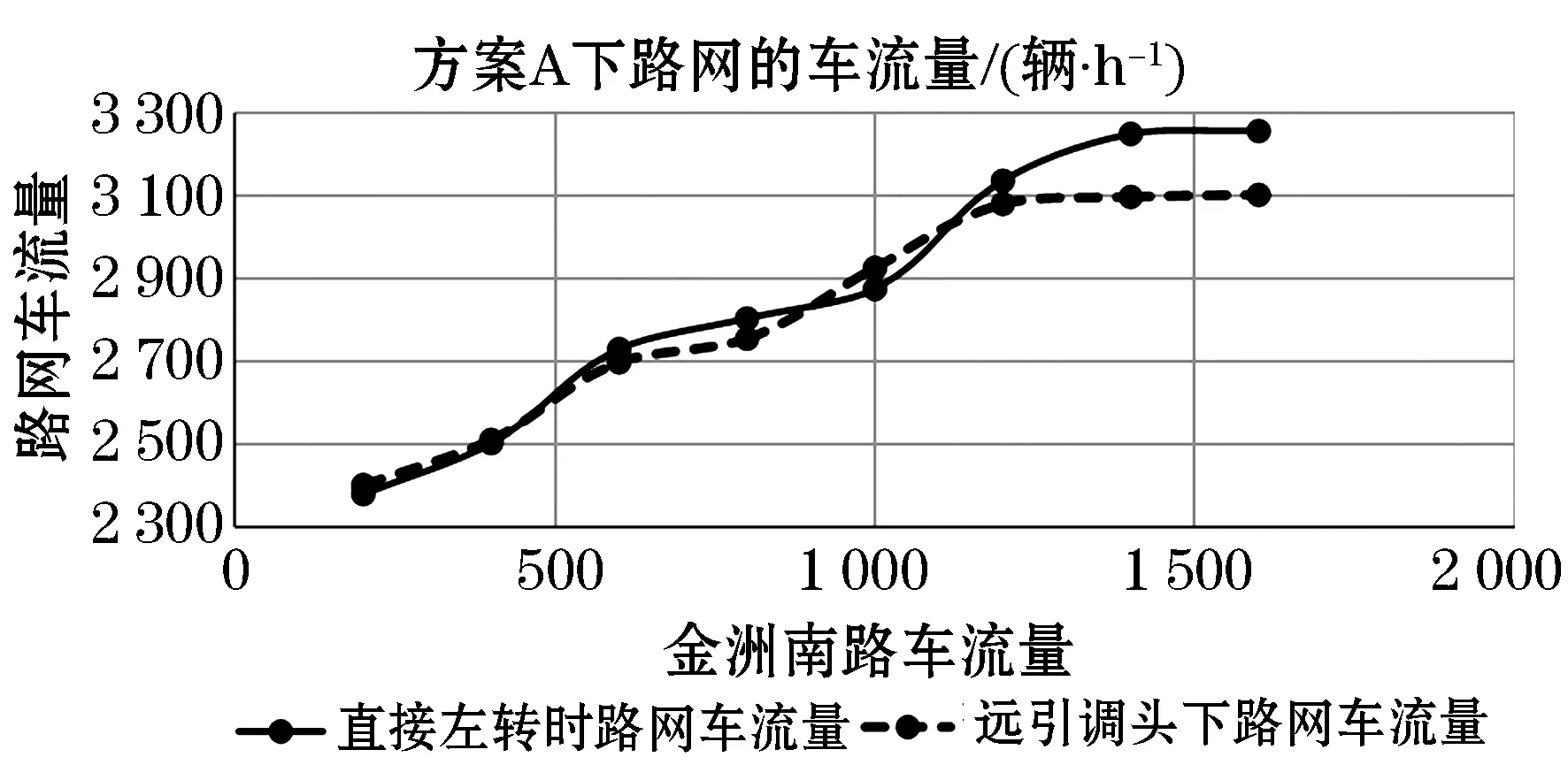
图10 方案A下路网的车流量对比图Figure 10 Traffic flow comparison diagram of road network under Scheme A
如图11所示,当金洲南路车流量小于1 200辆/h时,直接左转和远引调头两种组织形式对路网的平均延误影响并不大.但当金洲南路车流量大于1 200辆/h时,亭洲路采用远引调头的方式对路网的平均延误影响较大.即主路车流小于1 200辆/h且次路车流不大时,支路采用远引调头的效果较好.

图11 方案A下路网的平均延误对比图Figure 11 Comparison of average delay of road network under Scheme A
如图12所示,当金洲南路车流量小于1 200辆/h时,直接左转和远引调头两种组织形式对路网的平均停车延误影响并不大.但当金洲南路车流量大于1 200辆/h时,亭洲路采用远引调头的方式对路网的平均停车延误影响较大.即主路车流小于1 200辆/h且次路车流不大时,支路采用远引调头的效果较好.
如图13所示,当金洲南路车流量小于1 200辆/h时,直接左转和远引调头两种组织形式对路网的平均排队长度影响并不大.但当金洲南路车流量大于1 200辆/h时,亭洲路采用远引调头的方式对路网的平均排队长度影响较大.即主路车流小于1 200辆/h且次路车流不大时,支路采用远引调头的效果较好.

图12 方案A下路网的平均停车延误对比图Figure 12 Comparison of average parking delay of road network under Scheme A
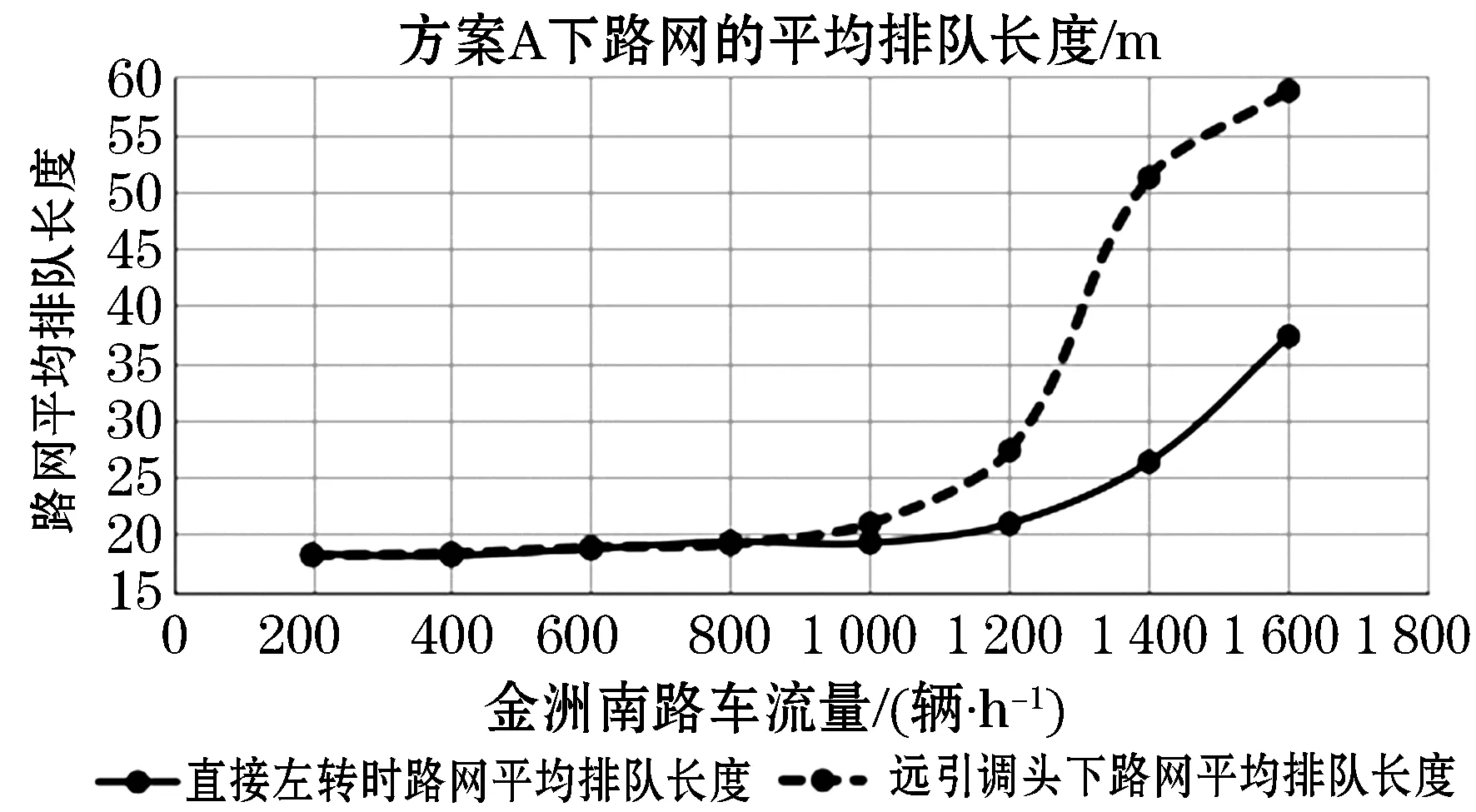
图13 方案A下路网的平均排队长度对比图Figure 13 Comparison of average queue length of road network under Scheme A
如图14所示,当金洲南路车流量小于1 200辆/h时,直接左转和远引调头两种组织形式对路网的平均停车次数影响并不大.但当金洲南路车流量大于1 200辆/h时,亭洲路采用远引调头的方式对路网的平均停车次数影响较大.即主路车流小于1 200辆/h且次路车流不大时,支路采用远引调头的效果较好.
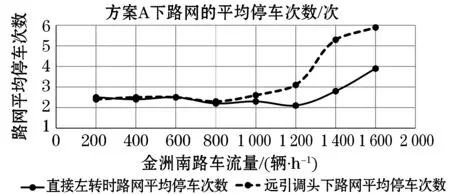
图14 方案A下路网的平均停车次数(次)Figure 14 Average stopping times of road network under Scheme A (times)
如表2所示,当凤冈路车流量小于120辆/h时,直接左转和远引调头两种组织形式对路网的平均延误影响并不大.但当凤冈路车流量大于120辆/h时,亭洲路采用远引调头的方式对路网的平均延误影响较大.即主路车流较大且支路车流不大于120辆/h时,支路采用远引调头的效果较好.
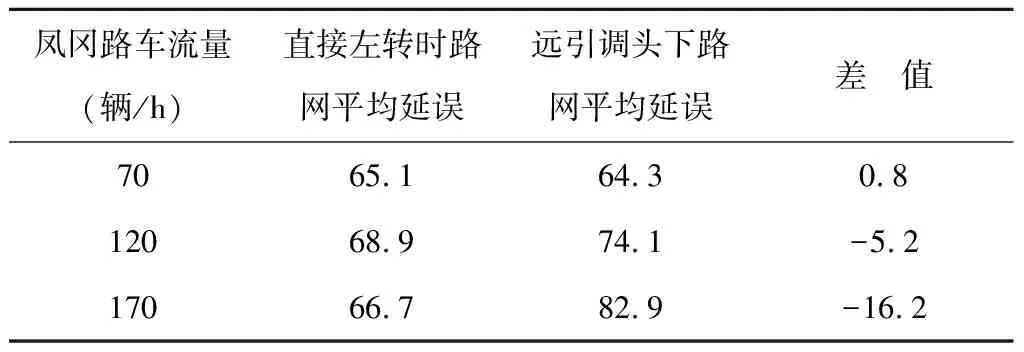
表2 方案B下路网的平均延误(s)Table 2 Average Delay of road network under Scheme B (s)
如表3所示,当凤冈路车流量小于120辆/h时,直接左转和远引调头两种组织形式对路网的平均停车延误影响并不大.但当凤冈路车流量大于120辆/h时,亭洲路采用远引调头的方式对路网的平均停车延误影响较大.即主路车流较大且支路车流不大于120辆/h时,支路采用远引调头的效果较好.
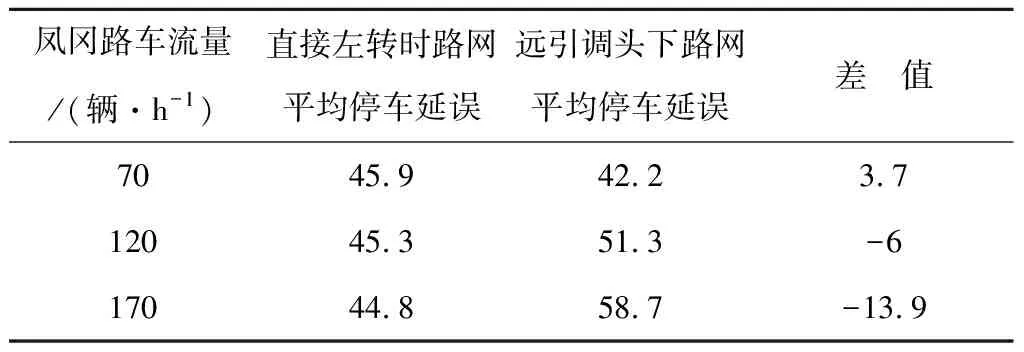
表3 方案B下路网的平均停车延误(s)Table 3 Average parking delay of road network under Scheme B (s)
4 结 语
远引调头作为交通组织的一种疏导形式,在很大程度上改善了左转交通流的冲突,提高了交叉口的通行能力.本文介绍远引调头组织方式的理论体系及相关模型,并基于VISSIM交通仿真软件利用模型数据反映远引调头组织方式的交通运行机理,模拟直接左转和远引调头方式的交通效果,最后对仿真效果进行分析研究.研究对远引调头组织方式的实施有较大的实践指导意义.还可以在以下几个方面进行深入研究:
1)对在路段进行左转调头的组织效果进行深入分析,后续将系统对其进行研究;2)在实际的远引调头组织工作中,允许左转车在调头交叉口的停车线后的虚线处调头,此时左转调头车辆不受信号控制的影响.虽然一般情况下,直接调头车辆较少,但后续研究可以将其加以考虑,以确保研究成果的精度,也使得研究成果更具指导意义.
