宠物喂养远程控制系统设计
2021-12-17李俊娇周志成何俊康
李俊娇,周志成,何俊康
(南京机电职业技术学院,江苏南京,211306)
0 引言
随着我国社会的发展,工作生活压力变大,生活节奏变快,越来越多的人选择喂养宠物陪伴自己、缓解压力和孤独,但是由于工作繁忙,经常会出现早出晚归或者加班、出差的情况,从而导致无法保证宠物的正常进食,影响宠物情绪,进而损坏家中物品,严重的可能会影响宠物健康以及生命安全。因此,需要对宠物进行定时喂养,保证宠物的健康。目前,市面上存在的宠物自动喂食机只具备定时喂食的功能,不会根据宠物的实际情况进行喂食。一旦宠物不想进食,食物易回潮、变质。同时,宠物喂养者们已不满足于简单的宠物定时喂养,他们想要观看宠物进食过程,了解宠物进食情况,在宠物进食过程中与宠物进行交流,这就对宠物的投喂提出了更高的要求。
1 设计方案
设计系统主要实现定时投喂模块、人工投喂、自主饮水、视频监控、音乐播放等功能,其外观如图1所示。其中定时投喂功能可以实现对宠物定时、定量投喂,养成宠物每日规律进食习惯;人工投喂功能可以实现通过视频监控和音乐播放与宠物行成互动、陪伴,并通过选择投放食物1或食物2进而对宠物投喂主食或零食;音乐播放功能可以选择宠物喜欢的音乐或者饲养主喂食宠物的录音,在定点进食前播放,养成宠物听到声音自动到食盆前进食的习惯;视频模块可以实现饲养主在线观看宠物进食、与宠物互动。
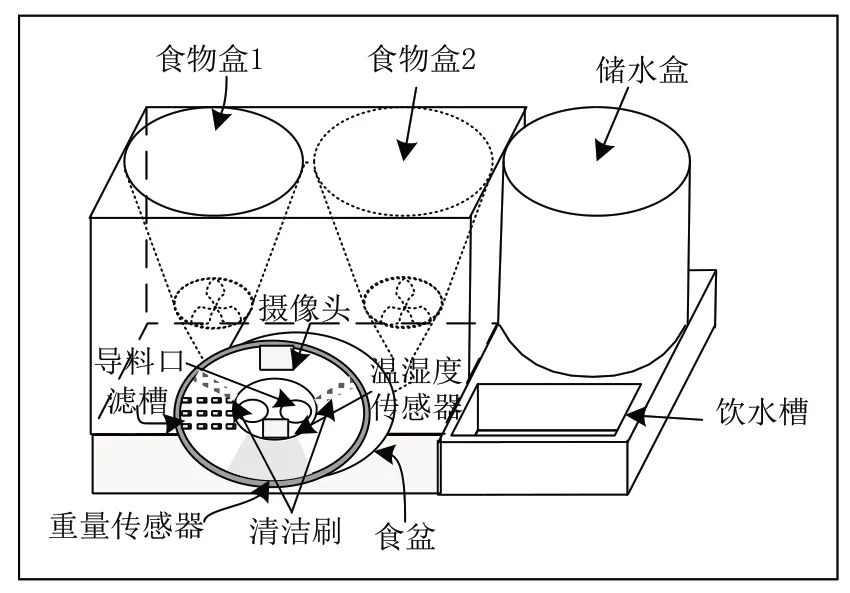
图1 宠物喂养装置外观图
系统是由宠物检测模块、食物投放模块、以及视频监控模块构成。系统主要以STM32单片机为控制核心,通过定时器、红外传感器、重量传感器、限位开关等作为触发信号,培养宠物进食习惯,同时记录宠物每次进食量和时间间隔,建立相应的宠物每日进食情况,配合宠物进食视频,方便饲养主和医生在线浏览或观察宠物身体状况。宠物喂养远程控制系统的框图如图2所示。
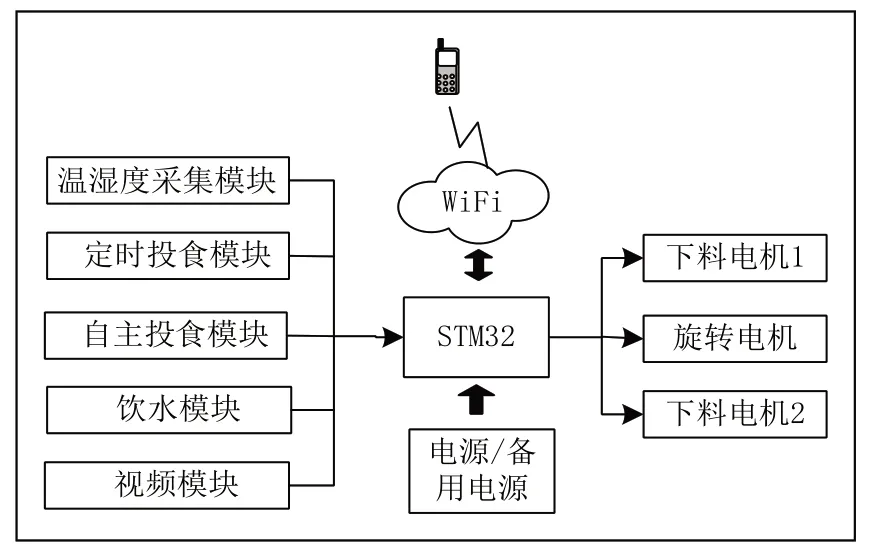
图2 宠物喂养装置框图
2 硬件设计
■2.1 主控模块
主控模块采用的是STM32F103RCT6芯片,它是是基于ARM微处理器32位内核处理器,具有2.0~3.6V的电源供电,上电/断电复位、可编程电压检测器。同时,芯片连接温湿度传感器、摄像头、定时器、电机、重量传感器等。当定时器启动后,旋转电机旋转清洁食盆,经清洁刷清洁后,下料电机1旋转投喂宠物食物。通过网络主控模块与手机APP相连接,通过温湿度传感器显示实时环境温湿度,可以远程手动控制下料电机2旋转给宠物喂食。
■2.2 电源模块
喂养系统的电源主要给STM32、电机、温湿度传感器、红外传感器、摄像头等供电,所以,电源部分主要为220V电压通过降压模块转换为3.3V的直流电,对STM32控制模块以及传感器等部件进行供电。
■2.3 温湿度采集模块
宠物的生活环境应保持良好的温度和湿度,尤其是猫、狗类宠物,他们怕热、喜暖,对寒冷的环境有一定的抵抗力。由于猫体、狗体被长毛覆盖,缺乏汗腺,不易散热,因此要特别注意饲养环境的温湿度。一般来说,长毛类宠物适宜在气温18℃~30℃、相对湿度在40%~70%的环境下正常生活。
为了较好的宠物进食环境的温湿度,选择温湿度复合传感器AM2302,它的测量精度高,输出信号为已校准的数字信号,其温湿度检测范围分别为-40~80℃,0%~99.9%,可以满足系统要求。经测量选择将温度传感器放置在食盆的中下方位置,使其能够更准确地测量环境中的温湿度,及时向饲养主反馈。
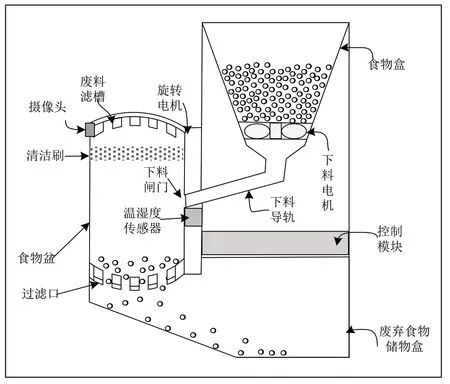
图3 喂养食盆结构
■2.4 定时投食模块
定时喂养模块主要是首先启动自清洁模式,通过清洁刷与旋转食盆达到清理食盆上附着的残留食物,残留食物掉落至废料滤槽后在经过滤口掉落至废弃食物储物盒,完成自清洁。其次,播放宠物喜欢的音乐,让宠物获知进食信息,养成宠物定时进食的习惯。再通过STM32设置定时器进而控制继电器,打开下料闸门,旋转电机配合食盆下方的重量传感器精准控制食物盒1投放喂食量,随后电机停止旋转投放,投放闸口关闭。定时投放模式中,投食的时间间隔和投食重量可以人为控制,饲养主可以根据宠物的食量,适当投放。
■2.5 自主投食模块
自主投食模式主要是通过手机APP通过网络控制食物盒2投食闸门开关、下料电机旋转,进而饲养主给宠物投喂零食。饲养主可以通过摄像头远程观看宠物,与宠物互动、给宠物投食,在自主投食模式下,单片机会记录宠物的进食时间、进食量,方便在宠物不适就医时,提供一定的数据参考。
■2.6 饮水模块
饮水采用的是独立于食盆设计,通过储水盒与饮水槽虹吸出水,储水盒为通用口径,可以替换其他饮用瓶装水。中间增加饮水槽与食盆间隙,防止宠物饮水溅出,同时增加饮水盆挡板高度,防止宠物饮水黑下巴。
■2.7 视频模块
视频模块的目的是通过摄像头与扬声器实现与宠物的互动,喂养者可以通过摄像头在线观看宠物进食情况,并通过自主投食奖励宠物,增加与宠物的互动性。摄像头选用OV2640摄像头模块,该摄像头200W像素, STM32F4驱动源码3.3V 。
3 软件设计
系统上电后,通过蓝牙与手机连接,设置相应数据以及wifi网络。宠物喂养装置如图4方式实现对宠物的喂养。主程序首先实现各个模块的初始化,然后通过网络获取设置信息以及控制信息。根据接收到的控制信息,判断是否对宠物进行投喂活动。宠物食盆清洁主要是通过环形食盆与清洁刷旋转摩擦,清洁掉食盆上附着的食物,剩余物通过食盆下方的过滤口,掉落到废弃食物储物盒中,进而完成食盆清洁,具体步骤如图5所示。

图4 主程序控制流程图
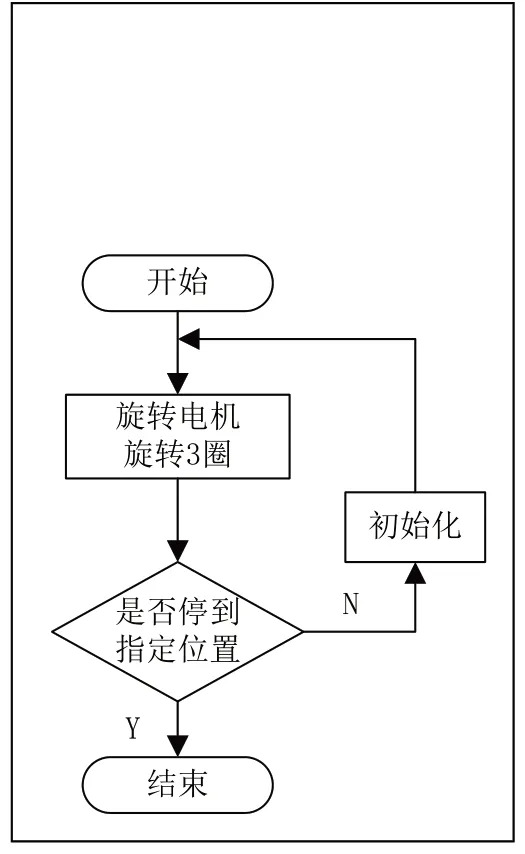
图5 食盆清洁控制流程图
当系统接收到对宠物的定时投喂信号后,自动按照设定信号进行定时定量投喂,如图6所示。定时投喂启动后,每次投喂前食盆自动清洁,同时播放喂食音乐,唤醒宠物进食,投喂开始后打开下料闸门,同时下料电机1打开,食盆中内置的重量传感器检测食物重量,当达到预定重量后,下料电机1停止,下料闸门关闭。饲养主选择自主投食模式后,系统会首先让使用者选择投食的重量,确定后对食盆进行清洁,其次打开下料电机,对投放食物进行称重,达到设置重量后,投食进入食盆,自主投食结束,如图7所示。
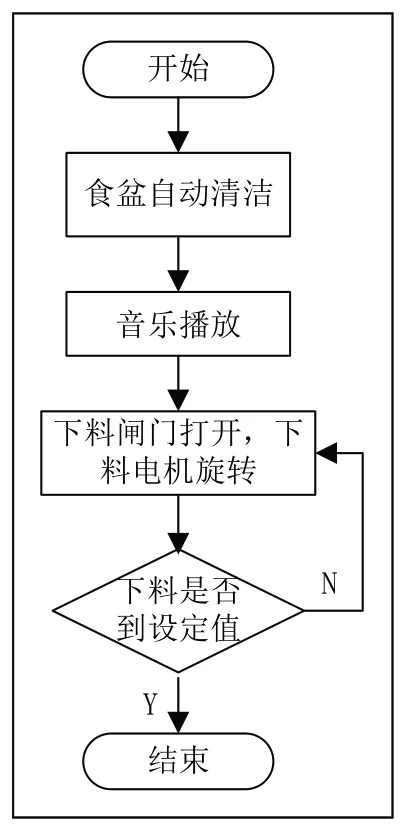
图6定时投喂控制流程图
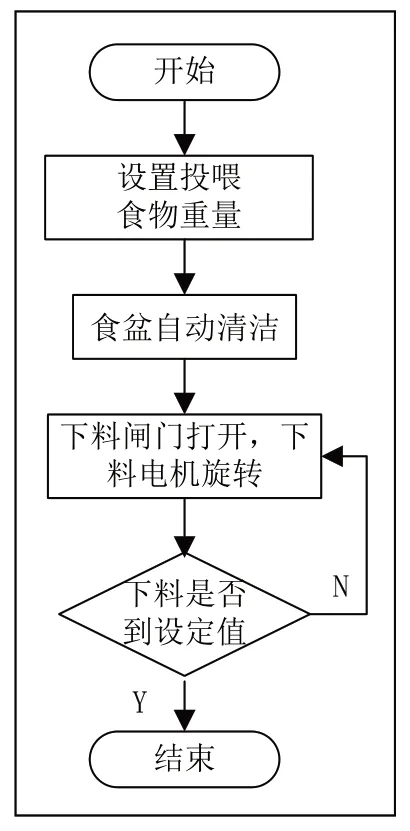
图7 自主投食控制流程图
4 结语
本文介绍了一种基于STM32的宠物喂养远程控制系统,该系统能够将宠物的定时喂养、自主投喂以及宠物饮水相结合,同时可以通过网络与手机APP相连接,实现饲养主实时在线观看宠物进食,并且通过传感器记录宠物进食情况,为宠物健康提供数据服务,在实际生活中有着一定的实用价值。
