无桨推进航行器的设计与实验
2021-12-17崔超
崔超
(郑州大学机械与动力工程学院,河南郑州,450001)
0 引言
目前,水下推进器的主流是螺旋桨推进器,其存在易被水草等异物缠绕、故障率高、噪音大等缺点。水下推进器是水下航行器的推动装置,直接影响着水下航行器运行的稳定和安全。美国、英国、加拿大等国家为了解决以上问题,大力研发泵喷推进器,但难以小型化且造价昂贵。因此,笔者设计了一种无桨推进器,并应用于水下航行器中,可以用作特定应用场景下螺旋桨推进器的替代物。该无桨推进航行器由无桨推进器、转向系统、观测系统和控制系统组成。本文重点介绍航行器设计与实验中无桨推进的创新部分。
1 装置方案介绍
该无桨推进航行器的设计目标是通过涡轮在航行器中部对水进行压缩,然后从无桨推进器的环形出口表面喷出,在产生直接推力的同时伴随有科恩达效应,从而实现航行器的无桨推进的效果。
无桨推进航行器的两侧安装有无桨推进器,单个无桨推进器能够产生一个自由度的推力,由两个无桨推进器则可完成差速转弯和掉头等动作.由航行器中部的重心调节模块,则可完成调节俯仰姿态以实现浮潜动作。整个无桨推进航行器的前进、转弯、上浮和下潜等基本动作均实现了无桨。
2 无桨推进器原理
无桨推进器是无桨推进航行器的核心部件,它是无桨推进航行器的直接动力来源[1],也是无桨推进航行器的创新所在。无桨推进器在结构上设计了环形出口曲面,喷出的水流在其表面会伴随产生科恩达效应,能够减少空泡率以达到高效、静音推进的目的。
科恩达效应,即:当流体与它流过的物体表面之间存在表面摩擦时(流体粘性),只要曲率不大,流体会顺着物体表面流动。
无桨推进器运行时,其结构主要由进水口、增压涡轮装置、内部管道、环形出水口四部分组成。在水下无桨推进器的底座上,设有入水口,该入水口可以在一定时间内使较多的水流入推进器的内部涵道中。在靠近入水口附近的涵道里,设置一个压缩装置,该压缩装置采用涡轮结构,可使用无刷或者直流电机作为涡轮的动力来源,该压缩装置使得大量水吸入推进器的内部涵道中,并将水加速。最后,被增压和加速的水流通过无桨推进器环形出水口内唇环绕射出,射出后的水流带动环形出水口后方的水流随之进入推进器环形中空的部分(在此过程中具有科恩达效应),并以高速度向外射出。以此获得反作用力,实现推力。
3 无桨推进器结构设计及航行器动力布局
无桨推进器的详细结构,包括环形出水口曲面①,环形出水口内腔②,增压泵无刷电机③,基体外壳④,过滤管道(网)⑤,入水口管道⑥,入水口空腔⑦,增压泵涡轮⑧,泵体固定轴⑨,过滤管道(网)固定轴⑩和涵道。
其工作时,首先在涵道①中的负压力作用下,入水口空腔⑦中的水和右侧的大量水向左进入涵道⑥,进入的水将通过过滤管道(网)⑤的过滤,再将水中杂质的含量降低到安全范围后,再向左进入增压泵涡轮⑧所在的空腔,在增压泵无刷电机③和增压泵涡轮⑧的快速旋转下,水压迅速上升,进而快速挤入环形出水口内腔②,并沿着环形出水口曲面①射出,产生推力,在这个过程中,伴随有伯努利效应和科恩达效应。
其无桨推进器的直接推力大小是可控的,决定其推力大小的是其内置的增压泵无刷电机的转速和功率。随着外部控制电路输入无刷电机的电压升高,无刷电机的转速和功率也随之升高,无桨推进器的直接推力也将变大。

图2 无桨推进航行器动力布局
本文所设计的无桨推进航行器上安装有2台无桨推进器,分别位于航行器中部的两侧;航行器中心位置安装有密封舱,内置控制电路、电池和重心调节装置;在航行器的前端位置设计有观察舱,内置有摄像头。
无桨推进航行器的设计制作与实验,是验证无桨推进器工作原理和工作效果的有效方式。
无桨推进航行器的前进时,两侧的2台无桨推进器同时同功率同推力工作,则可以实现直线前进;航行器在左右转向时,采用两侧的2台推进器不同的功率和不同的推力,从而实现差速转向和差速转弯;航行器的上浮和下潜,通过密封舱内的重心调节装置,通过控制桶里滚珠丝杠的旋转,带动重物前后移动,改变航行器整体重心的位置,当重心的位置位于航行器的艉部时,俯仰姿态为仰的状态,此时前进能够达到上浮的效果;同样地,当重心的位置位于航行器的艏部时,俯仰姿态为俯的状态,此时前进能够达到下潜的效果。

图3 无桨推进器三维模型
通过航行器上2台无桨推进器和重心调节装置的有序工作,可以使无桨推进航行器在水下三维运动时实现无暴露螺旋桨,从而在一定程度上避免了因为水草、沙石对航行器造成的危险。
4 无桨推进器流体仿真和实验
■4.1 无桨推进器三维模型的建立
通过SolidWorks软件对无桨推进器进行三维建模,并保存为igs格式。将建模好的无桨推进器导入ANSYS workbench软 件 中,使 用ANSYS fluent和SolidWorks simulation进行流体仿真。
■4.2 模型网格划分和预处理
设置边界条件为涡轮增压进水速度为10m/s,流场介质为20℃water,环形出口压力为0MPa,使用k-e湍流模型。

图4 网格划分
■4.3 运算及其结果
设置运算精度为10e-3,最大迭代次数为100次[2]。无桨推进器涵道内和环形出水口表面流速如图5和图6所示。其出水口最大流速可达15.512m/s,其位置处于涵道空腔的中心部位,环形出口后方流速稳定在2.5m/s-5m/s的区间内。仿真结果显示,无桨推进器的性能较好,在原理上较为合理。
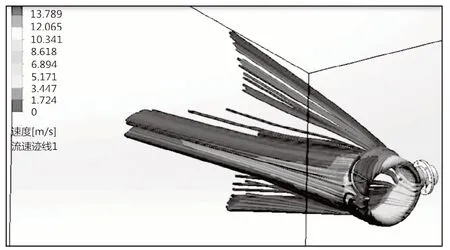
图5 绕环出水口流场图
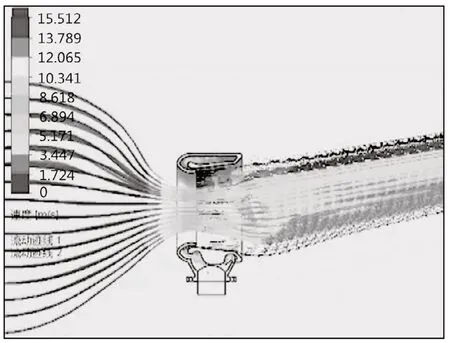
图6 纵剖面流场图
■4.4 无桨推进器实际测试
为验证无桨推进器的可行性和仿真的可信度,我们在室内水池环境中对其进行了实际测试。将无桨推进器安装于推杆底部,测力计安装于推杆上部,使其力臂相同,则所测的推力大小即为无桨推进器推力大小。我们设置了同功率的螺旋桨推进器作为对照。实验对照结果可得,在30W功率时,无桨推进器的推力为0.795kgf,而螺旋桨推进器的推力为1.205kgf,可得无桨推进器目前同功率下可达螺旋桨推进器推力的60%左右。

图7 推力实际对照测试
同时,在实验室的室内水池环境中对无桨推进器的实际测试中(图8),可清晰观察到水流顺着环形出水口表面流出,与仿真结果接近,实际存在科恩达效应和伯努利效应。我们在实验室的室内水池中加入泡沫等杂物模拟在户外环境中的水草、沙石等破坏物,实验可得无桨推进器在泡沫干扰的情况下一切正常。

图8 无桨推进器室内测试图
5 航行器样机制作仿真及实际测试
无桨推进航行器的样机已通过计算机有限元仿真的方式,对其在水中工作的运动状态进行了仿真和预计。其仿真结果如图9所示。由仿真结果可得,航行器以0.5m/s的速度前进运动时,其最大的压强出现在前部,其值达到了0.45MPa。
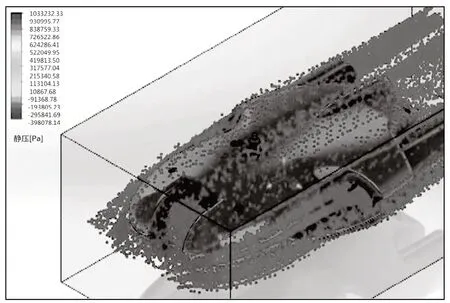
图9 航行器前进运动仿真图
完成的无桨推进航行器样机如图10所示,其主要参数如下:规格:850mm×360mm×220mm。总质量为12.2kg,重心调整的距离长度为300mm。航行器上装有航模接收机,可与地面的航模遥控器连接通信,从而完成地面的各个任务命令。
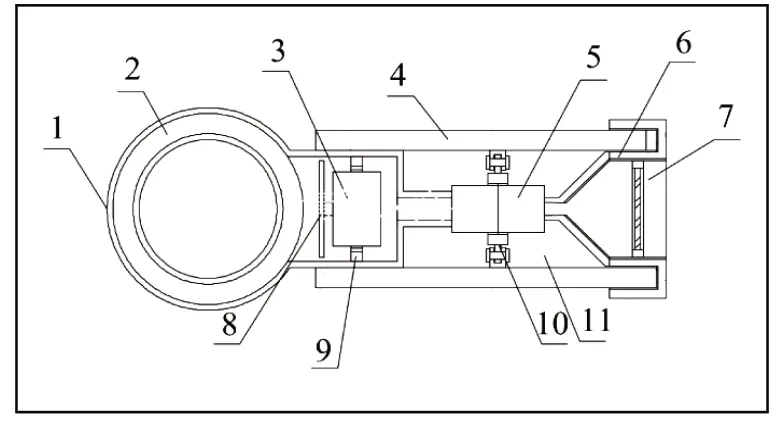
图1 无桨推进器纵剖示意图
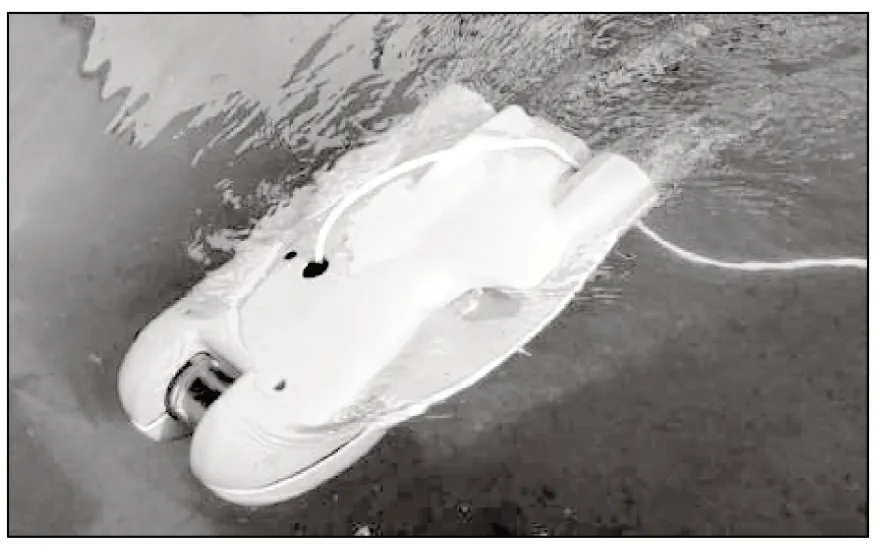
图10 样机户外湖泊测试图
该样机已经在室内水池环境和室外湖泊环境中进行测试,其稳定前进的速度为0.5m/s,可通过增加整机功率来提升其速度。左右转向以及上下浮潜的动作完成时间不超过3s。
6 结论
笔者设计了一种无桨推进器并将其应用在水下航行器中进行了实验研究,无桨推进器运行平稳且不受恶劣水质的影响。整套设备设计精良,可靠性好。该装置能在很大的程度上成为螺旋桨推进器在恶劣水质环境中的替代品,在船舶和海洋工程等行业中有很高的应用价值。
