基于STM32单片机的包裹分类机器人
2021-12-17胡澳魏明亮
胡澳,魏明亮
(南京工业大学浦江学院,江苏南京,211100)
自2016年以来,快递市场一直在快速增长,但缺乏高效,成本效益好的包裹处理解决方案已成为制约快递行业发展的主要问题。一方面,在”双11”和其他大型购物公司以及春节前后,劳动力市场混乱不堪,劳动力短缺,劳动力成本居高不下;另一方面,包装产品种类繁多,规格各异,因此很难集中和批处理达到。
本文在综述国内外现有包裹分拣系统的基础上,确定了包裹分拣机器人的总体设计方案。其中包裹分拣机器人的行走方式采用滚轮式行走结构,驱动电机控制车体行进方向。采用单片机控制,配备OV2640摄像头传感器、红外循迹传感器等检测环境信息,随之将位置信息传送至显示屏上,并具有抓取放置功能。
1 总体电路结构设计
本文所设计的包裹分拣机器人主要是由控制模块,识别模块,电机驱动模块,循迹模块和显示模块组成,其中最重要的部分是控制模块,采用STM32F4ZGT6为主控芯片。电机驱动模块采用直流减速电机,舵机和L298N电机驱动板构成,驱动信号由控制模块输出,传送至L298N驱动板控制电机的转动和机械手的抓取;识别模块采用OV2640摄像头模块,通过对图像二值化处理,实现对包裹二维码的识别;循迹模块采用5路TCRT5000L红外反射光电开关传感器,使得载物小车沿着限定的路线寻走,计横向/纵向坐标,走到投放点把货物卸下;显示模块则使用TFT屏作为显示器,通过传感器模块所传递的信号,在控制模块中进行一系列转换,最终传送至TFT屏中显示包裹的位置信息。通过各个模块之间相互作用来实现包裹分类的功能。图1为设计方案图。

图1 设计方案图
2 硬件设计
■2.1 控制模块
STM32F4系列是一款具有高性能的CPU、84MHz的晶振频率、众多的定时器和储存器的单片机,它丰富的储存器,为识别算法提供了充足的运算空间。并且还拥有多个通信接口、高性能、低价格、低功耗等特点。还可以选择串行调试和JTAG接口调试,更加方便程序下载与验证。非常适合本次设计要求。
■2.2 识别模块
2.2.1 OV2640模块
OV2640摄像头内置采用了一个同时带1/4寸图片CMOS UXGA ( 1632×1232)的环形图像处理传感器。这种前置摄像头不仅具备了相机体积小、重量轻、需要的空间光源少和电压低,还同时拥有了高达200万多个像素的前置镜头,并且同时具备了内置单片uxga系列摄像头以及装在相机上的数字影像信号处理器等所有主要功能。主要由s和sccb使用总线接口进行远程控制,能向单片机输出整帧、缩放等影像数据。用户在视频拍摄时候还可以自由地自行选择所要进行拍摄的视频图像文件质量、输出的图像信号和其他数据传输格式,例如:drgb565模式。ommivision彩色图像光学传感器处理是一种应用其自身独有的金属图像光学传感器处理技术,通过尽量减少或大大幅度消除各种金属光学或者金属电子的图像缺陷,例如消除固定彩色图案的图像噪声、拉拖、浮散等,提高图像质量,得到清晰的稳定的彩色图像[1]。
2.2.2 二维码识别
条码大致可以再细分为两类第一类是一维条码( one dimensional bar code ),一维条码易被使用时会因其容易导致受到数据包含容量的约束,导致它只能被认为是标识出来的商品,而不是所有描述出来的商品。第二类是二维条码( two dimensional bar code ),二维条码很好地解决了一维条码所面临的问题,具有大容量和识别商品信息等功能。随着当前阶段我国特色社会主义农业市场经济的不断完善及现代信息电子技术的快速发展进步,国内外的人们对二维数字条码这种全新信息技术的应用要求也与日俱增。
其中二维码的条码亦因为有许多不同的基本编码方式,被人们称为二维条码制。按这些矩形码制的基本结构编码以及工作流程原理而言,通常大致来说可以将其划分归类为以下两种编码类型:二维行列并排式二维矩形条码、矩阵式二维矩形条码。其中矩阵式二维图形条码技术应用的领域范围比较广泛,具有重要技术代表性的矩阵式二维图形条码主要类 型 有:codeone、maxicode、qrcode、datamatrix等,而本文采用的则是QR Code条码。
本系统通过OV2640模块拍摄二维码图片,然后对图片进行二值化操作,之后将其导入库中进行译码,得出坐标信息例如X1Y1,最后导入到控制模块中完成识别任务。其识别算法如下所示。


■2.3 电机驱动模块
电机上的驱动芯片模块由直流电机发动机和交流电机上的驱动模块芯片共同组成,其中直流驱动电机上的驱动模块芯片一般是直接采用一个l298n芯片来进行驱动的,其实物图如图2所示,而交流电机上的驱动模块芯片种类数量繁多,根据直流电机的驱动结构和其它的工作运动原理,又一般可以将直流电机驱动划分成两为直流驱动电机和两种交流驱动电机。其中异步直流电动机主要特点具有系统结构简单、制造费用少以及制造成本较低的几大特点,而且系统的基本工作效率高,运行可靠,普遍用于各种产业。因此本文采用的电机为直流减速电机和舵机。

图2 L298N实物图
L298N模块主要由H桥集成电路组成,广泛应用于各种电动机负载。其具备充足且稳定的电压电流,是驱动直流电机的最佳选择。不仅价格低廉、功耗低而且它的输入端还可以直接与单片机IO口连接,只需要控制单片机输出高低电平信号,就能实现电机顺时针转动与逆时针转动使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机[2],OUT1,OUT2、OUT3和OUT4分别对应着电机A、电机B。通过使能EnA,EnB端口,控制电机的运行状态,其L298N逻辑原理图如表1所示。

表1 L298N逻辑原理图
由表1可得当ENA作为使能端,只有当ENA有高电平时,控制对应的IN1、IN2才会使电机发生转动。当ENA有低电平时,无论IN1、IN2输入高低电平,电机仍处于停止状态。故利用此特性,可以通过单片机输出的PWM波实现电机速度的控制。同理,ENB使能端对应的IN3、IN4端口与ENA使能端对应的IN1、IN2端口原理相同,图3为L298N电路原理图。

图3 L298N电路原理图
■2.4 显示模块
显示屏幕的种类繁多,其中TFT( thin film transistor )又被人们统称为一种具有薄膜电磁场效应的晶体管。其中我们所说的薄膜晶体管,就是指一个屏幕上每个像素点都由一个场效应的晶体管来驱动。从而实现了高速地显示一个屏幕信息。所以本文采用的显示器为TFT屏幕。
■2.5 循迹模块
作为包裹分类机器人,路线规划是必不可少的环节。而本文路线规划采用的传感器为TCRT5000L红外反射光电开关传感器。此传感器TCRT5000发射的红外二极管连续发射红外线。光敏晶体管是一种模块,如果发出的红外光没有被反射或反射,但强度不够强(表明二极管始终处于关闭状态),则该模块始终会提供高电平。当检测到的物体出现在检测区域中时(指示二极管点亮),红外线被反射并且强度足够高,光敏晶体管饱和并且模块现在处于低电平,其红外传感器电路原理图如图4所示。

图4 红外传感器电路原理图
3 软件系统总体流程设计
程序流程图如图5所示,控制模块的I/O地址分布如表2所示。
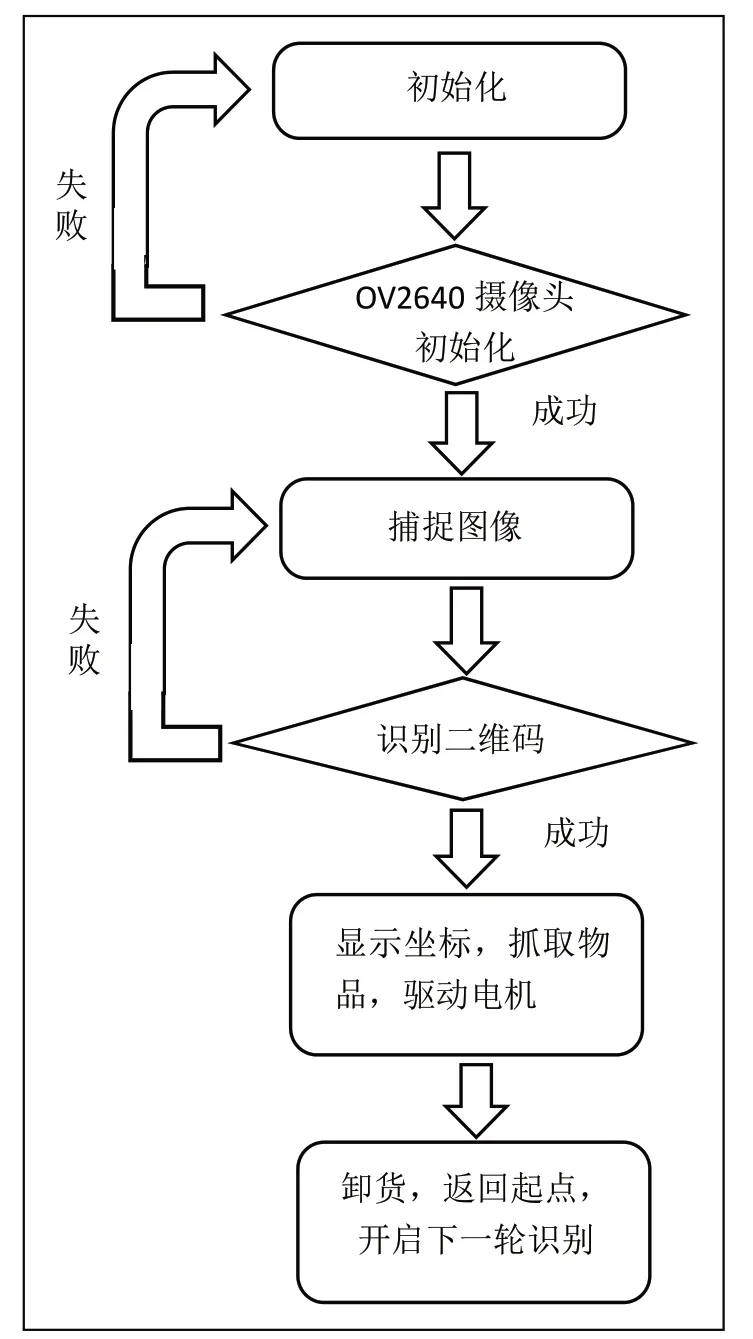
图5 包裹分类机器人程序流程图

表2
4 总结
实验现象:核心板通过OV2640摄像头采集二维码图像信息,通过图像识别算法得出坐标信息,然后利用机械手抓取包裹,同时将坐标信息显示于液晶上面,再驱动小车从原点坐标出发,当小车的四个红外开关全部检测到黑线时,红外开关全部输出为低电平,此时小车认为经过一个坐标点。小车从原点开始先走x坐标。到达x坐标后进行左转进入y坐标,然后到达y坐标后驱动机械手进行卸货。卸货完成后小车先左转,然后走回x坐标的原点,之后再左转进入y坐标,直至走到y坐标原点结束分拣,扫描二维码后按此依次循环进行。
