显示设备环境自适应色调映射算法
2021-12-16弓殷强邱国平
弓殷强, 余 新, 邱国平
(深圳大学 电子与信息工程学院,广东 深圳518052)
1 引 言
对于显示设备而言,如何在明亮环境下保证显示质量一直是最重要的研究课题之一。环境的亮度、白平衡会对显示画面的对比度、饱和度和白平衡的感知产生不利影响。另一方面,随着消费者对于显示质量的要求越来越高,高动态范围[1-4](High Dynamic Range, HDR)技术也得到了巨大的发展。ST 2094标准[5]定义了动态元数据的HDR视频格式,将像素的数值与绝对亮度联系起来。然而,由于显示设备的最大亮度通常不足以显示高质量的HDR图像,这就要求显示设备根据自身的亮度以及图像的最大亮度给出对应的色调映射算符[6-33](Tone Mapping Operator, TMO)。
显示设备的质量立足于观看者的主观体验,而人类视觉系统的研究[26-30]发现,在不同的光照环境下,人眼会对相同亮度的目标产生不同的主观体验,因此在不同环境下自适应地对图像进行处理是必要的。色貌模型(Color Appearance Model)是预测包含色适应状态的不同观察条件下颜色感知的数学模型。CAM16色貌模型[30]在CIECAM02的基础上进行了小幅度的修正和简化,并且获得了不输给后者的表现。利用CAM16以及其逆运算即可非常准确地补偿由于亮度压缩带来的效应。
基于色貌模型或对比度模型构造色调映射算符有望获得精确符合人类视觉系统感受的表现。Reinhard等人[11]提出了基于光感受器模型的色调映射算法。除了对图像的亮度进行运算之外,Sikudova等人[16]对图像的颜色修正进行研究。Choi等人[17]提出结合共生直方图和视觉显著性检测的色调映射算子,可以在压缩动态范围的同时降低颜色和亮度偏移。芦碧波等人[19]提出梯度域对基本图层动态范围压缩,并与细节层的信息融合,再经过色彩校正的算法提高了信息熵和客观指标。王峰等人[20]提出基于亮度分区和导向滤波的方法,对清晰度有了较大的提升。然而上述工作都没有针对显示设备和环境光进行特定的优化,无法直接使用在显示质量的增强上。
环境光下显示设备的色调映射问题[22-25]也受到了一定的关注,例如Mantiuk等人[22]通过最小化对比度误差的方式对图像进行色调映射与增强,可以在较亮的环境光下获得较为一致的观看体验,然而此文章并未对颜色偏移进行修正。Wang等人[25]综合了人眼的性质与环境光的影响,给出了环境光下的色调映射,然而此文章并未考虑环境光非均匀的情形,也未对环境光的色温进行补偿。综上所述,大部分对环境光下的色调映射研究都局限较简单的环境下,例如未考虑环境光的分布,未考虑环境的白平衡带来的效应等,在复杂环境中,为了尽可能补偿图像的画质损失需要探究新的方法。
鉴于上述需求,本文提出了一种针对显示设备的环境自适应的色调映射算子,该方法不但可以根据图像的亮度和显示设备的亮度进行动态范围的压缩,还可以匹配当前环境的白平衡变化,并且根据每个像素附近的环境光分布,自适应地调整像素的亮度以及饱和度,减弱环境光对显示效果的影响。
2 算法原理与实现
在复杂环境下,显示设备的显示质量受到诸多因素的影响。首先,原图像的最大亮度和动态范围很可能高于显示设备的显示能力;其次,环境的色温将会影响观察者的主观颜色感受;再次,环境光与图像的直接叠加将会降低图像的对比度和颜色准确度;最后,环境光的分布将会对图像产生局部的影响。解决这些问题有助于提高显示设备的显示质量和环境适应能力。
最大亮度和动态范围的匹配是一个典型的色调映射问题,通过亮度映射、色彩修正、亮度和色彩通道的融合3个步骤,即可将HDR图像转化到特定显示设备的能力范围内,如图1所示。
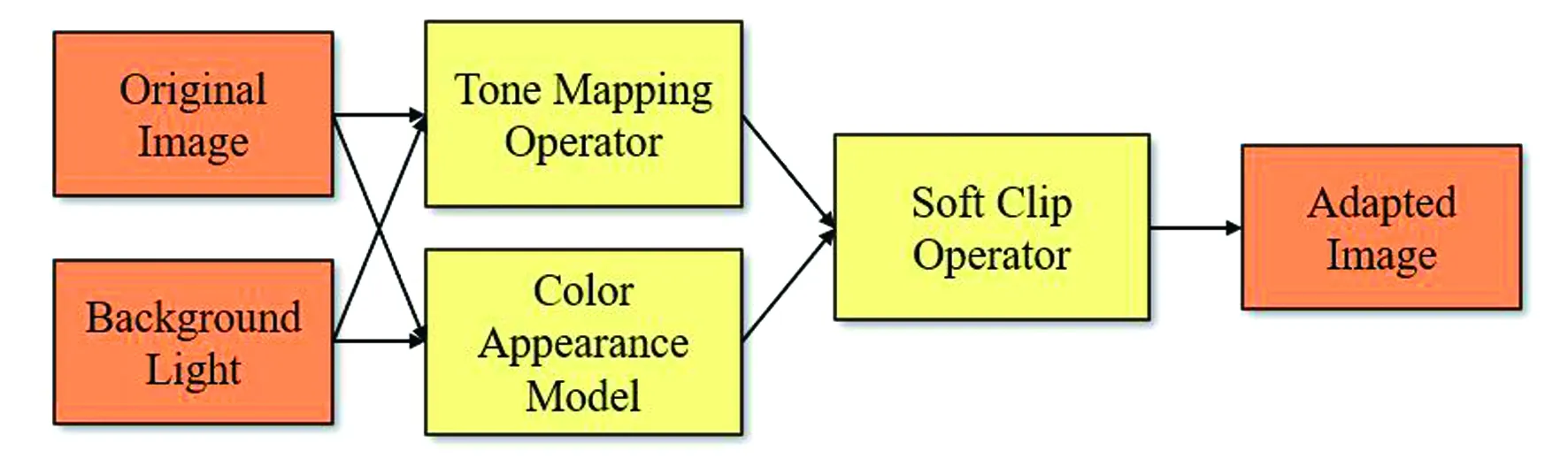
图1 本文提出的色调映射算子示意图Fig.1 Proposed formulation of the tone-mapping problem
2.1 显示设备和环境光模型
一个理想显示设备可以由最大亮度Lmax、本征对比度C0、三原色和白点的色坐标以及伽马曲线来定义。显示设备的亮度可以表示为:
Ld(n)=nγLmax+Lmax/C0+Lbg,
(1)
其中Lbg为环境光在显示区域内的亮度。
环境光指照射到屏幕上除图像光之外的其他光线,而背景光指环境光在经过屏幕反射后进入人眼的光线。在屏幕散射性质为朗伯体或接近朗伯体时,背景光的亮度可以通过环境光的照度推算出来:
(2)
其中:k表示屏幕的反射率,Eamb表示环境光的照度,在均匀照明时它是一个常数,在非均匀照明时环境光的分布与位置相关,如图2所示。
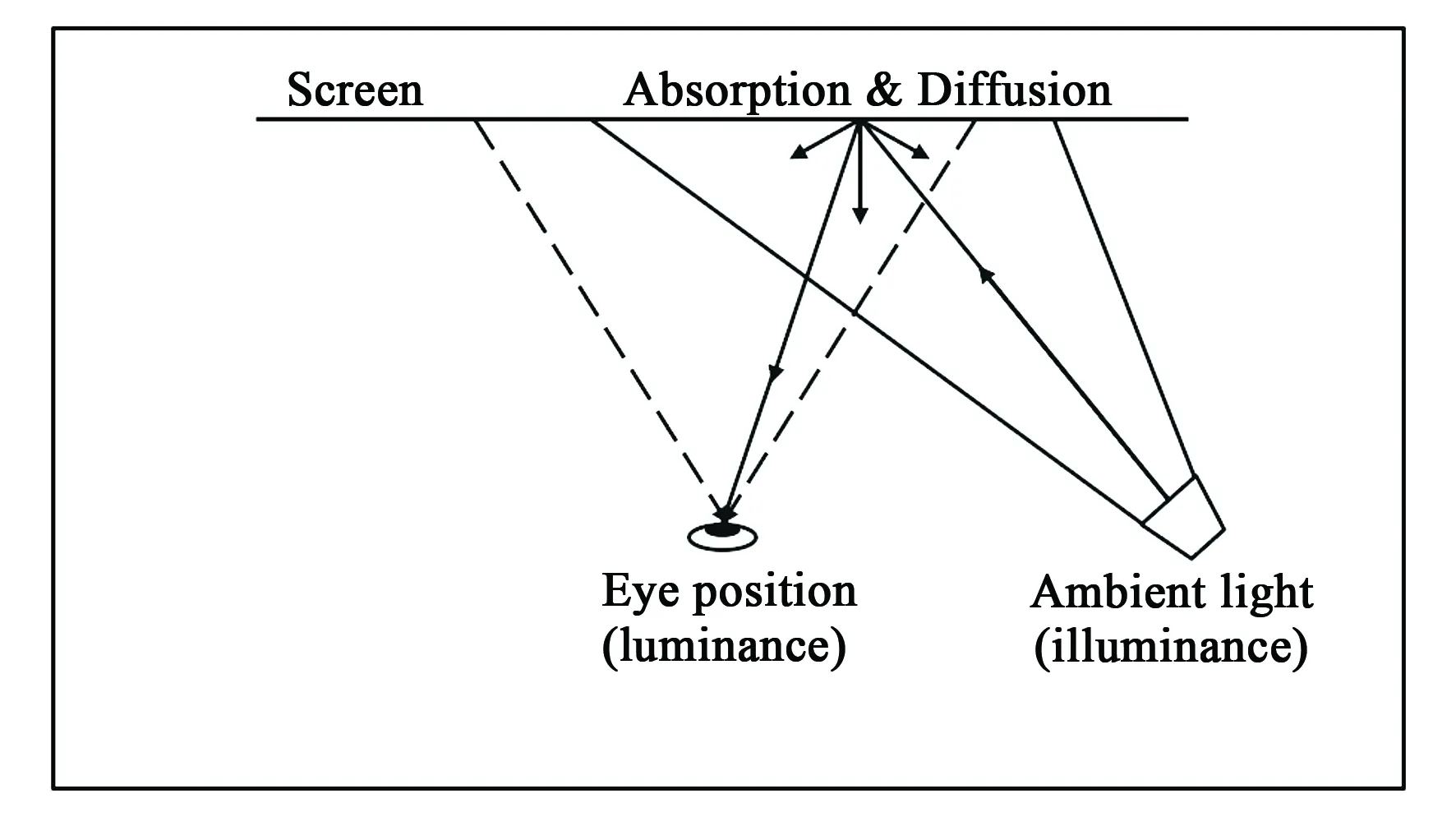
图2 环境光与背景光示意图Fig.2 Schematic diagram of the ambient light and the background light
不同设备的反射率的表现存在很大差异,这些差异导致显示设备对于环境光的适应能力不同。例如投影机在向普通墙面投影时,环境光将会通过漫反射被观察到而干扰正常的图像光,因此投影机对环境光很敏感。而显示器、电视、手机屏幕等设备一般具有很高的环境光吸收率,对环境光不敏感。尽管如此,在较强的环境光下,绝大部分设备都会遭遇环境光带来的负面影响。
上述环境光的照度需要通过技术手段进行测量,并且测量方式需要依据不同的场合来设计。一种思路是通过相机拍摄背景光的分布,再通过式(2)转换为环境光的照度。例如投影机的环境光测量,可以将相机直接集成在投影机上;对于室内场馆等环境光分布恒定的场合,可以提前在标准观察位置进行测量。另一种思路是将亮度传感器集成在屏幕平面上,并且利用式(2)转换为背景光的亮度。例如超短焦激光电视的亮度测量,可以将颜色传感器阵列集成在投影屏幕上。对于LCD、OLED或者LED大屏类的显示设备,也可以将亮度传感器集成在屏幕周围、像素间隙或者屏下。
只有在环境光与显示设备的亮度在相差1~2个数量级以内时才会对显示设备造成严重影响,因此在传感器选型时,可以根据屏幕的亮度和屏幕除以反射率得到特征照度,传感的动态范围保证可以覆盖到特征照度附近即可。为了保证颜色和亮度测量的准确性,上述颜色传感器需要进行校正。在某些情况下,传感器不可避免地放置在图像光的光路中,此时还可以根据显示的图像进行相应的减除以测量到背景光的强度。此外,由于环境光通常不会出现小尺度的剧烈变化,因此只需几个到几百个传感器分布于显示区域进行测量,并且通过插值或者智能识别等方式对环境光的分布进行估计。
环境光除了会直接对显示效果造成影响之外,还会影响到人对于白平衡的判断,进而影响到特定图像的主观感知。在较暗的环境下,显示设备的白平衡将会主导人的色彩适应,而在较亮的环境下,人眼的白平衡由环境光决定。
最后,由于人眼的亮度适应、对比度感知等效应都依赖于真实的尺寸,因此需要通过单位角度的像素数(Pixel per degree, PPD)来衡量图像真实尺寸和像素尺寸之间的关系。
2.2 亮度映射
亮度映射需要解决如下问题:首先,亮度映射需要将原始图像的亮度范围映射到显示设备的能力范围之内;其次,亮度映射时,图像的对比度感知水平不应出现过大的偏离和劣化;再次,亮度映射需要补偿不同的背景光强度带来的对比度感知水平的偏离。
Mantiuk[22]提出利用对比度感知模型将亮度映射曲线的求解转变为一个优化问题。对比度的主观感受主要取决于亮度、空间频率以及对应频率的强度,在对原始图像求对数后,高斯金字塔可以表征原图像不同尺度的亮度,拉普拉斯金字塔可以表征原图像的不同频率的强度。通过三维直方图统计不同亮度、空间频率和对比强度的像素出现频率,每个直条对应一个对比度感知强度。进一步,通过折线将亮度映射曲线参数化,并计算在何种参数下,可以达到损失函数的最小化:

(3)
其中:T(W,S)表示比度感知强度,i,m,l分别表示不同的亮度、对比度强度、空间频率对应的直条编号,ci,m,l表示直方图中每个直条的比例分布,从线性的亮度映射参数出发,通过梯度下降的方式即可得到最优的亮度映射曲线。
为了将上述方法推广到背景光非均匀的场合,可以基于若干强度不同的均匀背景光算出不同的亮度映射曲线,并根据背景光的分布情况通过插值得到当前位置的亮度映射曲线。等效的,也可以通过不同背景光下亮度映射后的图像进行插值。本文只选取两个背景光参数,即选取背景光为0的情景以及某个背景光较强的情景,并且将插值关系表示为:
(4)
其中:kbg=Lbg/Lmax和kbg0=Lbg0/Lmax分别代表当前位置的环境光相对强度,以及某个预先设定好的环境光相对强度。Ld,0,Ld,kbg0分别代表环境光相对强度为0和kbg0时的亮度映射结果。
2.3 颜色修正与色貌模型
对人类视觉系统的研究发现,亮度变化与颜色感知之间有非线性的联系,因此亮度映射将会导致颜色偏离,这些效应需要在颜色修正模块中被修正;此外,背景光对图像色彩的影响也需要修正,以达到准确的主观颜色还原的目的。
在运用模型之前,需要根据当前的使用场景指定CAM16的输入参数,包含白点色坐标和亮度、适应亮度以及背景的亮度。
对于原图而言,其白点色坐标由图像的颜色空间决定,亮度由图像中的最大亮度来决定。为了防止图像中少量的异常像素对白点的亮度产生影响,白点的亮度取为前5%分位的亮度值,即满足式(5)的取值:
P(L≥Lw,rw|L∈I)=0.05,
(5)
其中Lw,rw表示原图像的白点亮度。适应亮度La,rw一般取为Lw,rw的20%。
背景亮度被定义为当前像素10度范围内的加权对数平均亮度值,可以利用PPD将度数转化为像素数量,并利用高斯卷积的方式求得:
(6)
其中:G(x′,y′;l)代表有效半径为l(1/e2处截止)的高斯卷积核。Yb,rw代表背景亮度。根据CAM16的假设,Yb,rw的值需要利用100/Lw,rw因子进行归一化。
确定上述信息后,原图像可以被转化到颜色感知参数空间中。为了方便进行色彩补偿,此处使用CAM16-UCS的J′,M′,h′参数,分别代表明度、色度和色相。
由于本文的研究场景为较亮的环境,在显示场景,白点的色坐标被设置为环境的色坐标,在实践上可以通过测量背景光的颜色得知。适应亮度由图像光和背景光共同贡献。与上文相同,图像光的贡献默认设置为最大亮度的20%,背景光的贡献由背景光的对数均值来衡量,即:
La,d=0.2Lmax+exp{∑ln(Lbg)/npix}.
(7)
为了从J′,M′,h′参数反推出显示图像,需要预先确定背景亮度的分布,由于显示图像暂时未知,背景亮度的分布无法直接算得。由于显示图像对背景亮度的贡献与原图像相近,利用原图像对背景亮度的贡献来近似显示图像对背景亮度的贡献是一个很好的选择。在此基础上加入环境光带来的贡献后,即可估计出显示设备的背景亮度分布:
(8)
求得上述参数后,利用CAM16的逆变换,可以将J′,M′,h′参数无损地转换到显示设备所在的环境下。
最终,由于环境光的表现之一是降低色度M的值,因此在进行逆运算之前,需要先依据当地的背景光强度对M进行补偿,即按照公式(10),将M′提高为(1+kbg)倍即可。最终的颜色修正运算流程为:
(9)
(10)
(11)
其中:(Ri,Gi,Bi)和(Ro,Go,Bo)分别代表输入和输出图像中的某个像素,kbg代表当前像素位置的背景光相对显示设备最大亮度的比例。
2.4 亮度和色彩通道结合
在分别得到亮度和颜色的修正信息后,需要将二者结合起来,传统的方法为按照亮度比例对3个颜色通道进行相同的放缩,即:
(12)
其中:Ci和Co分别代表各个颜色通道的输入和输出,Li和Lo代表原始图像的亮度以及亮度曲线处理后的图像亮度。
然而上述处理方式会遇到两个问题。其一,由于色调映射对HDR图像的亮度进行最高数10倍的压缩,在亮度压缩的过程中颜色也会产生非线性的偏移,利用颜色修正的结果代替原始图像,即可有效解决颜色偏移的问题:
(13)
其中:Lcc和Ccc代表颜色修正后的图像亮度和各个颜色通道。
其二,这个过程中还可能出现由于特定彩色通道超出上界导致的偏色现象,称为过曝现象。过曝现象通常出现在饱和度较高的区域,这是由于饱和度较高的颜色对亮度的贡献较低,在经过亮度曲线处理后可能会获得一个较大的提升因子,导致其数值超越显示设备的能力。如果直接将过曝的数值硬截断到最大值,会出现诸多问题。一方面,会导致高饱和度区域出现色相和饱和度的变化;另一方面,会导致高饱和度区域的灰阶丢失,进而丢失特定的细节信息。
过曝问题的本质是,显示设备的限制导致了像素所需的亮度和饱和度无法兼得,即高亮的区域只能显示低饱和度的白色。考虑到大部分像素的过曝的数值只有2倍以内,在这个范围内即便不进行颜色修正,产生的颜色偏离也比较微弱。因此为了简化模型,本文选择在(R,G,B)空间对过曝问题进行限制。本文依据3个通道中超出的最大数值,定义了软截断函数:

(14)
其中:r0取为0.9,x0取为36.09,n表示某个像素通道的数值,m=max(R,G,B)衡量当前像素的最大过曝情况。
上述软截断函数的设计有诸多考虑:一方面,它整体压低了图像的亮度值,以给过曝像素提供一定的动态范围,防止丢失过曝区域的灰阶信息;另一方面,它也依据过曝情况补偿一定的白色分量,这一方面可以保持像素的色相基本不变,另一方面也可以有效调和亮度和饱和度无法兼得的矛盾。
3 结果与分析
本节包含了不同使用场景下本算法的最终效果以及与其他算法的对比。本文的数据来源为Fairchild[34]的数据集,选取若干张比较典型的HDR图像,包含室内和室外、不同亮度区间以及颜色取向。除了本文介绍的方法之外,Mantiuk[22]与Reinhard[11]的算法也作为对照展示出来。在仿真和实验环境中PPD设置为33。不失一般性,本文中显示设备处在sRGB颜色空间[35]。如果没有特别说明,则显示设备的最大亮度定义为Lmax=400cd/m2,本征对比度为1 000∶1。
3.1 动态范围压缩和颜色修正
在黑暗环境下,本算法可以对输入HDR图像的动态范围进行压缩,并且对亮度变化过程中产生的主观颜色偏移进行修正。部分测试图的结果与对比如图3所示。可以看到,3种算法都比较好地完成了色调映射的目标,得到了观感良好的结果。从对比度的角度出发,测试图(2)的背景树林和测试图(4)的远近景对比,可以明显感受到图3(a)和3(c)方法都具有更强的对比度,而(b)方法的图像显得比较平均。从颜色准确性的角度出发,对比4张图片的蓝天表现,3(c)方法给出了饱和度高且符合人眼习惯的颜色,尤其是测试图(4)的远景天空,只有3(c)方法较好地还原了线性映射原图中的蓝天和红云。此外,在使用时,(b)方法需要手动对每张图像进行调参,才可以得到可靠的表现,因此无法实现自适应调节的需求,而3(a)和3(c)方法可以使用一套参数实现对不同场景的自适应调节。

图3 黑暗环境中不同色调映射算子的结果。(a) Mantiuk 08[22]; (b) Reinhard 05[11];(c) 本文提出的方法; (d) 线性映射的HDR原图。Fig.3 Results of TMO operators in a dark environment. (a) Mantiuk 08[22]; (b) Reinhard 05[11]; (c) Proposed method; (d) Linear mapped HDR image.
通过CAM16-UCS色貌模型以及对比度感知模型可以计算输出图像与原始HDR图像之间感知参数的差异,这些差异可以对运算结果做出客观的评价。对于颜色偏差,CAM16-UCS中提供了标准的计算方法:
(15)
其中:ΔJ′Δa′和Δb′是CAM16-UCS中J′、a′和b′的偏差。
除此之外,由于本文侧重于对色度和色相进行还原,并未针对明度的偏差进行优化,因此为了直接对比和衡量算法的表现,需要构造一个参数来衡量输出图像的色度和色相偏差的同时忽略明度偏差。将上式中的ΔJ′贡献删去,使用以下参数作为衡量标准即可满足需求:
(16)
基于对比度感知模型[29],如下参数可以用来衡量原图像和输出图像之间的对比度感知差异:
(17)
其中:level求和代表不同空间频率的求和,即对图像金字塔的阶层求和,空间频率ρ(周期每度)选取为从0.7到20的区间,即人眼较为敏感的区间。式中的pixel求和代表对图像金字塔每一层的像素求和,npix代表图像金字塔每一层的像素数量。
与HDR原图相比,图3中图像的上述参数的偏差如表1所示。红色加粗的数字代表当前参数表现最好的方法。可以看出,本文提出的方法在两个衡量颜色偏离的参数ΔE和ΔEc上,均具有更好的平均表现。在衡量对比度感知的参数ΔC上,本文提出的算法也具有更加稳定且精确的表现。Reinhard[11]算法的表现依赖于图像的亮度直方图分布,在一些场景会有很好的表现,但在个别场景也会出现很大的偏离。
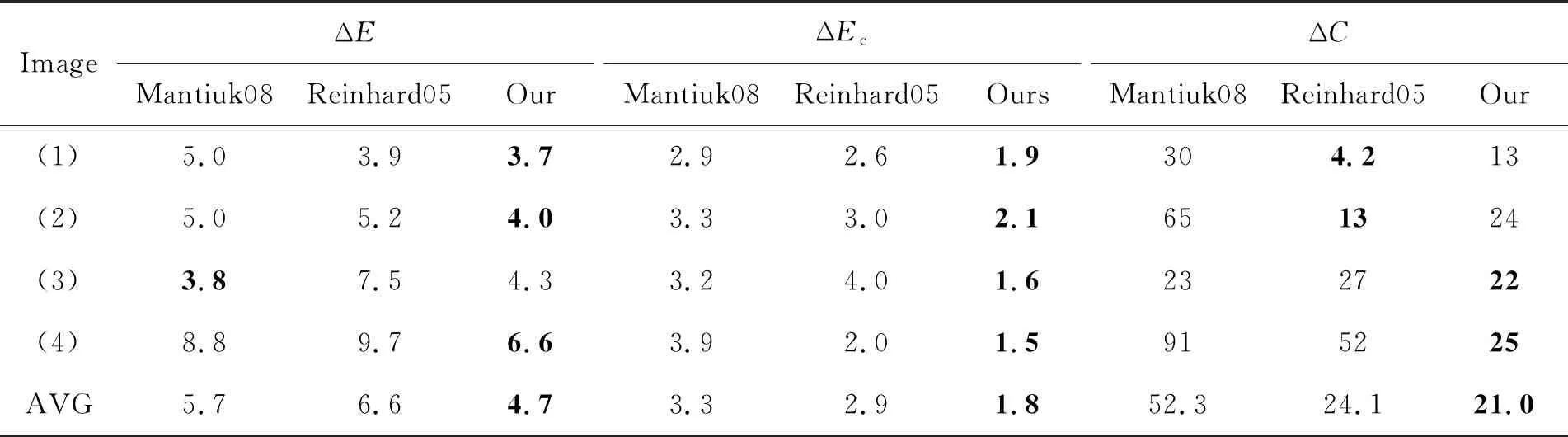
表1 测试图在不同的TMO下的各项表现Tab.1 Performance of different TMO under different test images
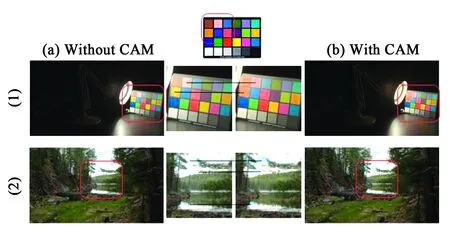
图4 色貌模型对图像颜色准确性的影响。(a) 没有进行颜色修正; (b) 通过CAM16进行了颜色修正。Fig.4 Influence of color appearance model on the color accuracy of images. (a) No color corrected; (b) Color corrected by CAM16.
通过对比标准色卡在颜色修正前后的图像,也可以体现出颜色修正的作用,如图4所示。由放大图中的黑色连线的对比可以看出,测试图(1)的色卡左上角的高亮区域在左图中出现了由于剧烈的亮度压缩而产生了偏色,而这个效应在右图中得到了有效的修正。此外,测试图(2)中蓝色的天空区域以及红色的云也得到了有效的修正。
通过对比是否包含软截断的图像以及对应的散点图,可以有效说明软截断函数修复过曝区域的颜色偏移,如图5所示。在散点图中的红色箭头标注可以看出,使用硬截断而产生的一部分颜色偏移较大的区域,在经过软截断函数的修正后,回归到了对角线附近的合理位置。
最后,为了展示本文提出的算法对于不同显示设备的亮度自适应能力,图6给出了不同亮度的显示设备上,色调映射的运算结果以及亮度映射曲线。对于通常的LCD显示器,其亮度约为150 cd/m2,在此情况下可以看到图6(a)有明显的过度提亮和过饱和现象,图6(c)和图6(d)较为灰暗,而图6(b)的亮度情况较为均衡。而对于一个实测亮度为400 cd/m2的投影机而言,图6(b)出现了过度提亮的现象,图6(c)有着最均衡的表现。继续提高亮度至实测1 610 cd/m2后,图6(d)表现最为均衡。以上结果表明,本文提出的算法可以比较有效地针对显示设备的最大亮度自适应地调节亮度映射。

图5 软截断函数对图像颜色准确性的影响。(a) 天空和花丛局部出现过曝,在局部放大图中过曝区域用蓝色标注出来。右侧的散点图展示了CAM16-UCS的主观颜色参数在HDR原图和最终图像的关系;(b) a′的散点图; (c) b′的散点图。Fig.5 Influence of the soft clip function on the color accuracy of the image. (a) Sky and flowers are partially overexposed, and the overexposed areas are marked in blue in the detailed images. The scatter plot on the right shows the relationship between the subjective color parameters of CAM16-UCS in the HDR original and final image; (b) Scatter plot of a′; (c) Scatter plot of b′.
3.2 环境色温自适应
环境的色温会影响观察者对白色的判断和对颜色的感知,进而影响到显示画面的颜色主观感受。基于色貌模型构建的色调映射算子,可以根据白平衡的不同,针对性地对原图像进行处理,以补偿颜色主观感受的偏离。不失一般性,HDR输入图像的白平衡被设置为标准的D65,本节展示了环境光的白平衡为D55、D65和D75三种情形,分别利用CAM16色貌模型,对比不同色调映射算子的运算结果,如图7所示。主观对比3张图像不难发现,算法依据环境光的色温,自适应地调节了图像的颜色分布情况,在不同色温下达到了比较一致的体验。散点图展示了原图与3种色调映射算子的运算结果的关系。利用本文介绍的算法处理后的分布在图中以绿色表示,其主要集中在对角线附近,这代表算法结果的颜色感知参数与原图更加接近。表2展示了3种色温下,不同算法的颜色感知偏差情况,红色加粗数字代表当前参数表现最好的方法,本文介绍的算法同样取得了很好的表现。


图6 不同亮度的显示设备上本算法的运算结果。(a) 25 cd/m2; (b) 100 cd/m2; (c) 400 cd/m2; (d) 1 600 cd/m2; (e)不同显示设备亮度的映射曲线。Fig.6 Performance of proposed algorithm on the display devices with different luminance. (a) 25 cd/m2; (b) 100 cd/m2; (c) 400 cd/m2; (d) 1 600 cd/m2; (e)Tone curves for different device luminance.
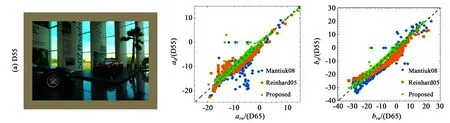

图7 环境色温对算法的影响。左图为本文介绍的色调映射算子在不同色温环境中的结果,环境色温以中等灰度的边框展示在图像中。右侧的散点图为CAM16-UCS主观颜色参数在HDR原图和最终图像的关系。(a) 色温D55; (b) 色温D65; (c) 色温D75。Fig.7 Influence of ambient color temperature on the algorithm. The left column shows the results of the tone mapping operator proposed in this paper in different color temperature environments. The ambient color temperature is shown in the image as a medium gray border. The scatter plot on the right shows the relationship between the subjective color parameters of CAM16-UCS in the HDR original and final image. (a) Color temperature D55; (b) Color temperature D65; (c) Color temperature D75.
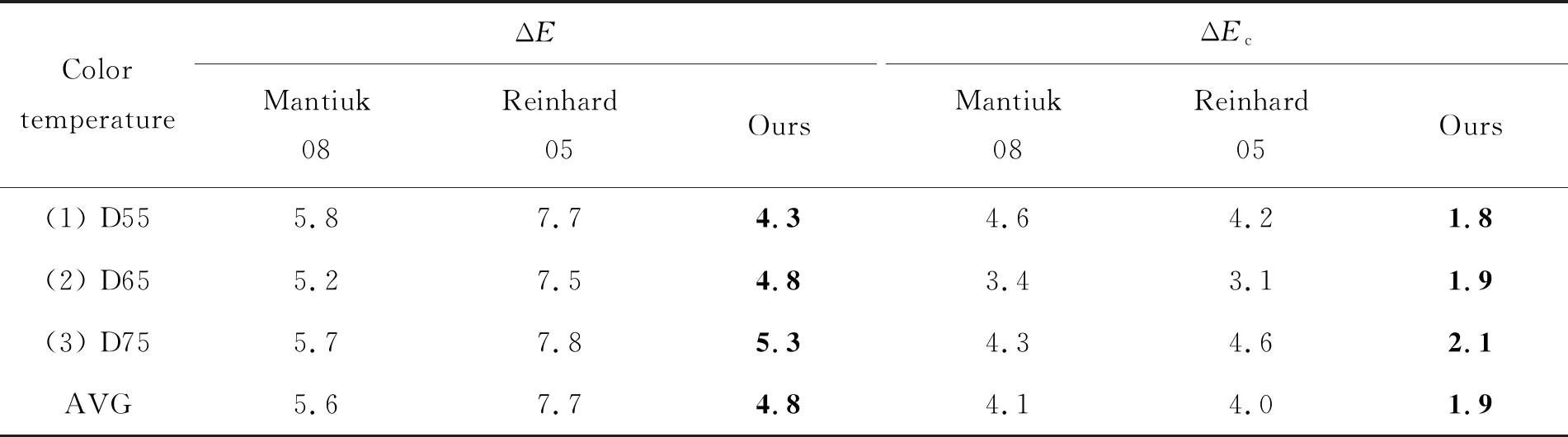
表2 各个算法在不同色温下的各项表现Tab.2 Performance of different TMO under different test images
3.3 背景光强度和形貌分布
在背景光较强的环境下,本算法可以通过自适应的局部提高亮度、增加色度以及修正色相偏差等操作,有效补偿背景光带来的颜色和对比度感知的偏移。本节包含了不同强度、不同分布、不同色温背景光下的色调映射结果。
图8展示了不同背景光分布时的结果。其中背景光的最大亮度被设置为10%的显示设备最大亮度,4种分布分别模拟了:(1)均匀分布;(2)台灯直射墙面的分布;(3)窗外阳光等平行光引起的分布;(4)吸顶灯引起的分布。不同分布的仿真结果都表现出很好的自适应特性。例如位于左下角的蓝色车辆,在环境光较强的分布(1)中,亮度和颜色饱和度都有所提高。此外,在环境光分布不均匀的(2),(3)和(4)中,仿真结果(b)的画面依旧可以保持较为统一的观感,非均匀背景光带来的主观感知变化得到了有效补偿。
图9展示了不同环境光亮度下的显示效果。环境光的分布选为图8第四列的分布,背景光的亮度取为0、0.1、0.2、0.25倍显示设备最大亮度4种情况。仿真结果显示,在背景光与原图像叠加后,原图像的主观质量依然得到保证。以至于在背景光的亮度到达0.25倍显示设备的最大亮度时,图9(4)的天空和树林的亮度和饱和度都被拉升,算法依然可以比较有效地抵抗环境光带来的画质损失。

图8 不同背景光分布下的运算结果。(a) 不同的背景光分布示意图;(b) 算法结果与背景光按比例叠加后的效果仿真图;(c) 显示设备的输入图像。Fig.8 Results under different background light distribution. (a) Pattern of different background light distribution; (b) Simulation images of the effect after the result and the background light are superimposed in proportion; (c) Input images of the display device.

图9 不同背景光强度下的运算结果。(a)算法结果与背景光按比例叠加后的效果仿真图;(b)显示设备的输入图像。Fig.9 Results under different background light luminance. (a) Simulation images of the effect after the result and the background light are superimposed in proportion; (b) Input images of the display device.
图10展示了不同白平衡环境下的显示效果。环境光的分布选为图8第四列的分布,背景光的相对亮度取为0.1,白平衡环境选取了D50、D55、D65、D75四种情况。仿真结果显示,在不同色温的环境中,算法都可以体现出自适应的处理结果,以保证在不同环境下的主观感受相同。例如在4张图像中白云的颜色都得到了修正,以匹配环境的白色。此外,不同色温的背景光也叠加在了图10的(a)行中的各个图像上,对画质产生的影响也得到了有效补偿,以至于背景光的影响难以察觉。
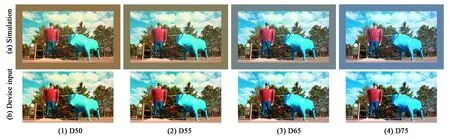
图10 不同环境色温下的运算结果。(a)算法结果与背景光按比例叠加后的效果仿真图; (b)显示设备的输入图像。背景光的最大亮度取为显示设备最大亮度的10%,背景光的分布见图8(4-a)。Fig.10 Results under different ambient color temperature. (a) Simulation images of the effect after the result and the background light are superimposed in proportion; (b) Input images of the display device. The maximum luminance of the background light is set to 10% of the maximum luminance of the display device. The distribution of the background light is shown in Figure 8 (4-a).
4 结 论
本文提出了可以在复杂环境的显示设备上重现主观颜色和对比度感知的色调映射算法,基于对比度误差最小化建立亮度曲线,基于显示设备所在环境的白点亮度、色坐标、背景光的强度和分布信息得到颜色通道的修正,并且在结合亮度曲线与颜色修正的过程中引入软截断函数以保证较小的颜色误差。与传统方法相比,本文提出的方法可以使颜色偏差降低到60%以下。这套结果可以构成一个可靠、高质量的显示设备图像增强方案。
由于本文专注于通过色调映射提高显示设备的主观感受,基于人类视觉系统的各项主观模型是一个很自然的选择。一方面,主观模型可以为色调映射算法提供精确的映射关系,是算法精确性和普适性的基础;另一方面,主观模型也是评价色调映射算法好坏的可靠标准,也可以被用来衡量算法以及参数表现的好坏。
本文还注重于色调映射算法与显示设备和环境相结合的理念。首先,设备的颜色空间、本征对比度、伽马曲线等参数都可以自由设定;其次观察环境的色温、亮度、环境光分布等信息也得到了很好的处理。这使得本文提出的算法具有非常好的实践潜力,尤其对于投影显示设备而言,在展览场馆显示、户外广告和工程投影显示、舞台显示、家用显示等场景都具有应用前景。
