机载近红外偏振激光雷达探测过冷云研究
2021-12-14李仕春黄祖鑫石东东辛文辉宋跃辉高飞华灯鑫
李仕春,黄祖鑫,石东东,辛文辉,2,宋跃辉,2,高飞,2,华灯鑫
(1西安理工大学机械与精密仪器工程学院,陕西 西安 710048;2西安理工大学现代装备绿色制造协同创新中心,陕西 西安 710048)
0 引言
云的辐射效应显著影响地气辐射收支平衡,所以云是研究大气系统和气候变化的重要因素之一[1]。在云物理学研究中,通常描述云物理特征的参数包含云底高、云顶高、云厚、云外形、云量、云空间尺度、云寿命史、云温度场、云气流场、云含水量等宏观参数,以及云粒子相态、谱分布、形状特征、光学厚度、消光后向散射比、云粒子谱分布函数等微观参数[2]。人工影响天气是大气科学研究的重要方向,其主要目的是减轻或避免气象灾害的出现和范围,而云特性探测是人工影响天气领域的关键技术之一,特别是过冷云存在与否及其空间尺度是人工增雨作业的必要条件[3],所以过冷云分布及其含水量是云物理学研究和人工增雨作业中极为重要的云物理特征。同时,过冷云也是对流层中航空飞行器的严重威胁,极易引起飞航事故[4],是航空领域需要考虑的重要因素。因此,过冷云空间分布的实时探测技术,具有极为重要的研究意义和价值。
云参数测量主要有图像测量法和光学计数法,多采用机载在线测量技术,需要测量飞机直接进入云系中进行测量。美国基于光学方法最早研制了机载粒子测量系统(PMS)[5],可自动连续测量不同尺度的粒子数密度,并用于云微观物理特性测量。我国也利用PMS系统开展了云微观物理特性的相关研究[6],但是PMS系统的一维前向散射探头观测的粒子谱在鉴别粒子相态上仍存在较大不确定性,需要结合其它信息进行甄别[7]。在线测量技术属于原位直接测量,测量准确度高,但是其入云采样方式不适用于过冷云探测,极易威胁飞航安全,且取样体积小,有必要发展遥感技术[8]。云特性遥感领域中,地基云雷达(尤其是毫米波雷达)可穿透云或者降水而广泛应用[9],如较为成熟Ka波段(典型35 GHz)毫米波雷达,以及高性能的更短波长W波段(典型94 GHz)毫米波雷达[10]。由于毫米波雷达的波长(典型3 mm)远大于云粒子尺度(典型几十μm),这依然会限制云粒子微观特性的探测效率,而更短波长的光学遥感设备(即激光雷达)则优势明显,目前多用于晴空时的气溶胶粒子特性遥感[11,12],也有研究者开展了多种手段的联合测量[13],其中偏振激光雷达由于具有探测粒子非球形特征,气溶胶和云粒子形状研究已成为热点,可见光和紫外域偏振激光雷达技术日趋成熟。2012年Wang等[14]利用2009年研制的紫外域(355 nm)机载偏振激光雷达[15],结合机载原位测量仪器和毫米波雷达进行了系统的联合观测实验,但由于其偏振激光雷达的激励波长较短(355 nm),极大限制了云层内的有效探测距离(约1 km)。
由于云粒子尺度一般大于10 μm,为提高偏振激光雷达的云中探测距离,可增加激光雷达的激励波长,有效减少光束在云中传输时小尺度气溶胶粒子的消光效果,提高大尺度云粒子的探测效率,Li等[16]提出近红外(1550 nm)波段的机载偏振激光雷达,以提高云粒子的探测有效性,从而推动我国自主知识产权的机载测云激光雷达研究。本文针对机载激光雷达应用,基于云粒子的退偏振原理,提出并设计同轴偏振激光雷达系统,以降低探测盲区并改善探测距离,实现遥感探测云粒子的非球性,以甄别云粒子的相态,基于米散射原理反演云粒子消光系数,结合机载PMS测得的等效粒子半径,反演云含水量廓线,同时,如果飞机在0°C高度飞行且向上探测时,即可获得过冷云分布,并以实际云粒子观测的粒子谱数据为基础,比较分析了三种波长偏振激光雷达的探测性能。
1 机载激光雷达系统
激光雷达是典型的光机电一体化集成仪器,通常可分为发射接收子系统和信息处理子系统,两个子系统之间一般通过光纤或空间光路连接,通过光纤连接的激光雷达系统可将两个子系统分开,具有很好的灵活性,而空间光路连接的激光雷达系统则具有高集成度和稳定性的优势。由于该系统是偏振激光雷达,故回波光信号转接时需要保持偏振特性,而激光雷达通常采用多模光纤传输回波光信号,很难保持光信号的偏振特性,同时机载仪器需要高机械稳定性,因此选择空间光路连接的系统方案,图1给出了该激光雷达在飞行器中的安装位置示意图,由于采用空间光路连接的结构,发射接收子系统不能置于机舱外面,故需要在飞机顶部开探测窗口,可充分利用Super King Air 350飞机上已有的探测窗。
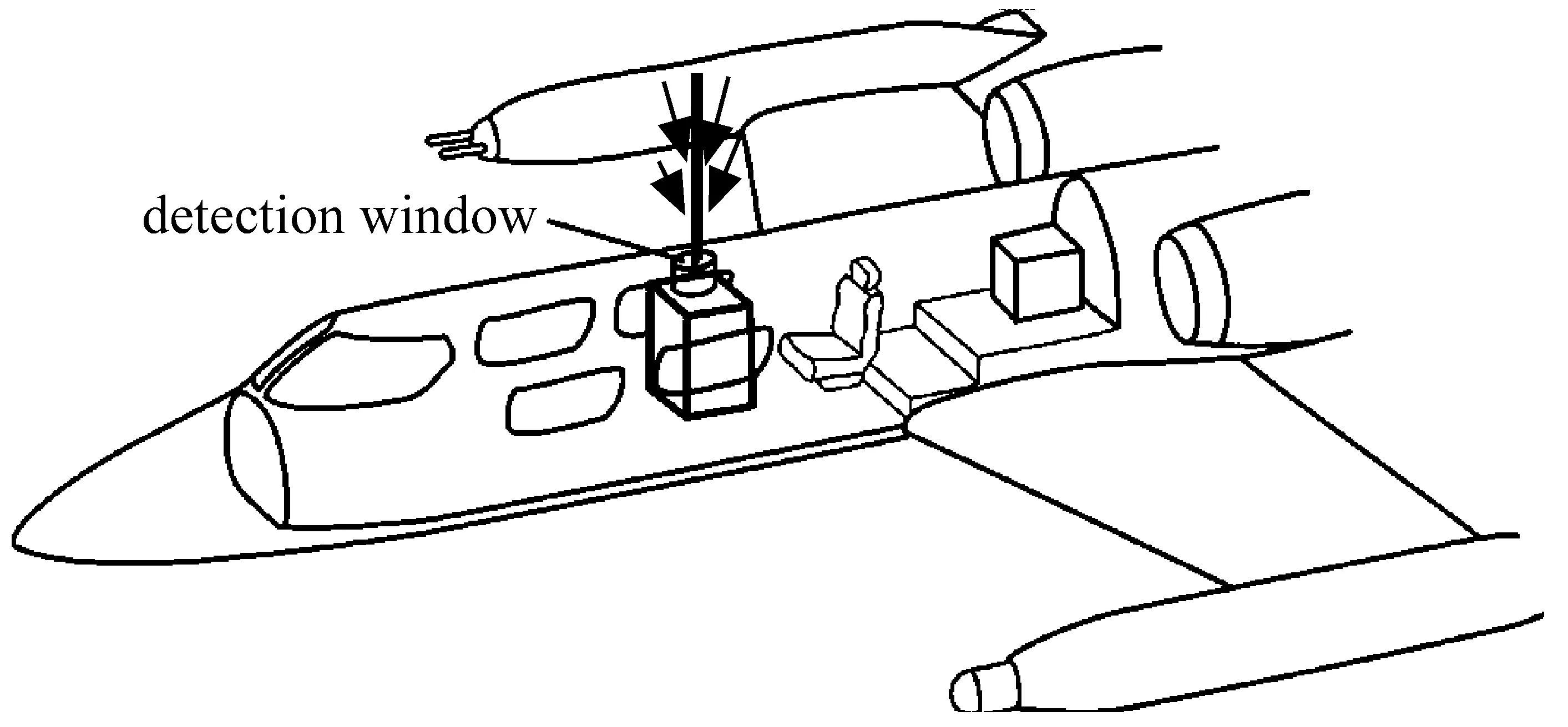
图1 机载激光雷达安装位置示意图Fig.1 Schematic diagram of location of lidar in aircraft
为高效探测过冷云分布,减少发射接收系统的探测盲区,设计收发同轴型偏振激光雷达系统,如图2所示,该结构具有高集成度和机械稳定性的优势,体积小,重量轻,以适应机载仪器的使用要求。激励光源采用1550 nm波长的微脉冲激光器,能够发射偏振比高达100:1的纳秒级脉冲宽度的激光脉冲,该激励光束由凸透镜L1会聚后,透过反射镜M1中心的小孔,周边杂散光及大发散角激光功率不能穿过小孔,大部分激光能量经由望远镜准直后直接射入大气。在激光束脉冲前向传输过程中,大气中悬浮粒子以及气体分子会对激光脉冲产生散射和吸收等作用,进而形成消光效应以及退偏振效应。而由后向散射系数决定的激光雷达回波信号再经由望远镜会聚接收,直接照射到反射镜M1上,小孔区域外的回波光信号经反射后进入偏振分光模块。在该模块中,回波光信号首先经凸透镜L3准直后照射在偏振分光棱镜PBS上,分光棱镜能够依据与发射光束偏振方向的角度不同,将光信号分成平行和垂直的两路光信号,一路光信号经窄带干涉滤光片IF1以及凸透镜L4会聚后,由光电倍增管D1实现光电信号转换,而另一路光信号经窄带干涉滤光片IF2以及凸透镜L5会聚后,由光电倍增管D2实现光电信号转换。两路微弱的电信号分别经电路放大模块OP1和OP2放大并调理后,经数据采集卡或光子计数卡进行数据采集,接入计算机的数据经云特性反演算法处理后,可得到云粒子特性的廓线信息,进而评估过冷云的时空分布。该激光雷达系统的主要参数如表1所示。

图2 近红外波段的偏振激光雷达系统示意图Fig.2 Schematic diagram of polarization lidar system in near infrared region

表1 机载偏振激光雷达的主要参数Table 1 Main parameters of polarization air-borne lidar
2 云特性反演算法
激光雷达是微波雷达的工作波长向光波段的延伸,其探测原理是大气中物质颗粒与激光束相互作用时的散射和荧光现象,大多数激光雷达都属于散射型激光雷达,其中,偏振激光雷达的主要依据是大气中悬浮粒子的Mie散射的光学退偏振效应,此时要求入射激励光是线偏振光,则后向散射光的偏振态将依据粒子的形状和折射率分布特征呈现出一定的偏振弱化现象,通常认为粒子形状偏离球形越大,或者粒子折射率分布偏离均匀越远,则其后向散射光的偏振退化程度越大[17,18],可用图3(a)进行描述,当线偏振激励光束照射在均匀球形粒子上时,此时通常认为后向散射光无退偏振效应,其电矢量方向与入射光相同,即仍然保持线偏振光状态;而当线偏振光束照射在非球形粒子或者折射率分布非均匀球形粒子上时,其后向散射光将依据形状变化或非均匀性程度而退变为部分偏振光,图3(b)给出了球形气溶胶、沙尘、水滴和冰晶四类典型粒子的后向散射强度和退偏比参数的关系,此可开展大气中粒子类型甄别的相关研究,例如依据退偏比甄别云粒子的相态。
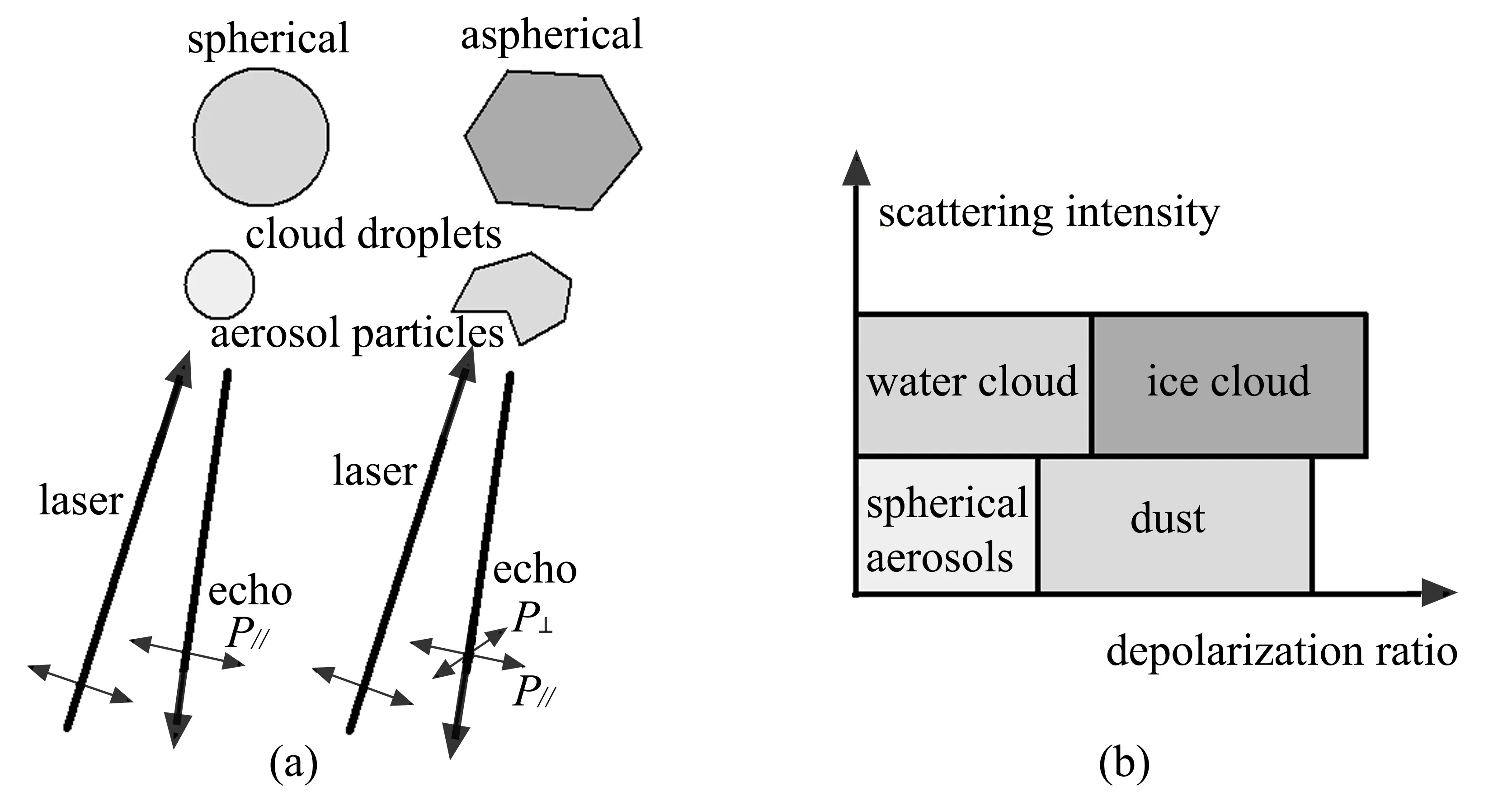
图3 偏振激光雷达探测原理。(a)粒子的光学退偏振示意图;(b)典型粒子的分类情况Fig.3 Detection principle of polarization lidar.(a)Schematic diagram of optical depolarization of particles;(b)Classification of typical particles
为描述大气中物质粒子对后向散射光的退偏振效应,通常将激光雷达回波光信号分解为两部分:一部分与入射激光束的偏振方向相同,称为P分量光;另一部分与入射激光束偏振方向正交,称为S分量光。并将其比值称为退偏振光功率比(简称退偏比),可表示为

式中PS和PP分别表示大气中物质粒子的后向散射光中S分量和P分量的光功率。
由经典的米散射偏振激光雷达方程,偏振激光雷达回波中P分量和S分量的光功率可分别表示为

式中:z是被测对象(即粒子)与激光雷达之间的距离;kP和kS分别表示P和S分量光的通道常数,主要受光学传输效率和电信号传输效率的影响;O(z)表示激光雷达的重叠因子,主要受激光雷达几何结构(即几何重叠因子)和激光束功率的空间分布的影响,kP、kS和O(z)都可通过理论分析确定或观测实验标定;P0是激励光单脉冲的平均功率(发射系统的核心指标);AR是接收望远镜的口径面积(接收系统的核心指标),P0和AR都是激光雷达探测性能的关键指标;c表示光在大气中传播的速度;τ表示激光脉冲的宽度;βi(z)和αi(z)(i=P或S)分别表示大气中被测粒子团的后向散射系数和消光系数,这是激光雷达方程中需要求解的两个量,通常通过忽略粒子大小、形状、均匀性等引起的差异,假设二者之间具有相关(如线性)关系,即消光后向散射比或激光雷达比,如Klett和Fernald气溶胶廓线的反演算法。
在偏振激光雷达系统中,大气中物质粒子的取向是随机的,具有很好的统计特性,可认为αP(z)=αS(z)=α(z),故(2)和(3)式中的指数型消光项可以认为是相同的。后向散射系数可反映物质粒子的数密度,其比值则与粒子的形状密切相关。因此,偏振激光雷达的退偏比可表示为

式中K=kP/kS,表示P和S分量偏振通道的灵敏度比,通过自然光的标定实验确定。可反演得到大气中粒子后向散射的退偏振比廓线,进而获得云粒子的相态分布信息。
云含水量也是人工影响天气领域的重要参数,通过整理综合(2)、(3)式,可得米散射总信号为

激励波长1550 nm位于近红外波段,很难依据大气中的分子瑞利散射校正通道常数(kP+KkS)和重叠因子O(z),但可选择高山中静稳的云雾粒子,将其近似为折射率分布均匀的球形粒子以校正系统参数。
由于云中粒子数浓度大,且激励波长1550 nm处于近红外波段,大尺度的云粒子将在激光雷达回波中起主导作用,故可假设消光后向散射比为常数,利用激光雷达的Klett算法反演计算粒子的消光系数廓线,即

式中zc是Klett算法反演时的参考高度,在大气底层气溶胶特性反演中,通常取无气溶胶粒子的对流层顶作为参考高度,本系统中由于激励波长处于近红外波段,晴空大气就可选作参考高度,增加了粒子特性反演算法的适用性。
假设沿激光束距离激光雷达z处云粒子数密度谱函数为

式中N(r,z)表示单位体积内粒子半径为r的个数,粒子的体积谱分布函数可表示为

对(8)式积分,可得云含水体积,进而得到云含水量可表示为

式中ρ是粒子的密度。而消光系数可表示为

式中Qex是粒子的消光效率。(9)、(10)式的比值可表示为

由于云粒子通常较大,可近似取Qex≈2,则(11)式可化简为

式中Reff为云团的等效粒子半径,可通过云的类型假设或由机载PMS探测数据经统计分析得到。由此,依据云粒子消光系数廓线可反演得到云含水量廓线。
3 性能仿真及分析
机载在线云观测实例数据如图4所示,给出了1540 m和5000 m高度处的云粒子数密度,其数据来自于腔式气溶胶粒子光谱探头(PCASP-100X)和前向散射光谱探头(FSSP-100ER),前者能够探测直径0.1~3.0 μm的小尺度气溶胶粒子,后者能够探测3~50 μm的大尺度云粒子。图4中给出了距地面高度分别为1540 m和5000 m的云粒子谱信息,低空云(1540 m)的粒子数密度明显大于高空云(5000 m),这符合对流层的实际情况。两种云都具有双峰结构,第一峰值直径约为0.3 μm,第二峰值直径约为4 μm。

图4 机载在线仪器的云特性观测个例Fig.4 Observation examples with in situ airborne instrument for the cloud characteristics
基于标准大气模型和球形粒子的Mie散射数学模型,利用图4的云粒子谱数据,仿真分析了图3所示机载近红外偏振激光雷达(系统参数如表1所示)的性能,不同激发波长的回波信号如图5(a)所示,其1 s累积时间的信噪比分析(SNR)如图5(b)所示。从图5(b)中可看出,如果定义系统有效探测距离为信噪比阈值100时的探测距离,则可获得不同波长时系统有效探测距离如表2所示,仿真中由于355 nm的激光单脉冲能量只有μJ量级,其有效探测距离不足0.5 km,尚未达到文献[15]中激光雷达实际探测距离,而文献[14]中紫外域偏振激光雷达的单脉冲能量为16 mJ,脉冲重复率为20 Hz,接收口径为75 mm。由于单脉冲能量差异很大,以及云粒子浓度不确定,很难直接比较分析两种激光雷达系统的探测性能。对比两种云层粒子谱分布的仿真数据表明,随着激励波长的增加,大尺度云粒子对回波信号的影响作用增强,特别有利于研究大尺度云粒子谱分布。

图5 (a)激光雷达回波信号及(b)信噪比仿真结果Fig.5 Simulation results of(a)the echo signals and(b)SNR of lidar

表2 不同波长激光雷达有效探测距离对比分析Table 2 Comparison of the lidar effective detective range with different exciting wavelengths
仿真结果表明,该近红外波段偏振激光雷达在1.5 km范围内可忽略太阳背景光的干扰,激励波长为1550 nm与1064 nm的比较,前者大气透射率明显高于后者,具有更远的探测距离。由于在图4中的两种类型云中存在大量直径小于3 μm的小尺度粒子,因此使用355 nm的激光雷达具有最低的大气透射率。当工作波长为1064 nm时,在1540 m和5000 m高度处云层的检测距离分别为0.8 km和1.0 km;而当工作波长为1550 nm时,在1540 nm和5000 m高度处云层的检测距离分别为1.1 km和1.5 km。
4 结论
由于机载在线探测过冷云会威胁飞航安全,提出了一种近红外波段机载偏振同轴激光雷达,用于遥感云粒子特征,并基于米散射理论提出了一种利用偏振激光雷达反演过冷云分布的解析模型。为提高激光雷达在云中的探测距离,将激励波长延拓至近红外波段,减少云中小尺度气溶胶粒子的消光,提高大尺度云粒子的探测距离和效率;基于标准大气模型和机载在线仪器的云粒子谱,对比分析了三种波长的偏振激光雷达在不同高度对流层云的探测性能。结果表明:该近红外波段偏振激光雷达在1.5 km范围内可忽略太阳背景光的干扰,在相同条件下,波长1550 nm的激光雷达的探测距离比其他两个波长更远,高度1540 m处对流层云的探测距离约为1.1 km,而高度5000 m处对流层云的探测距离约为1.5 km,可为过冷云探测提供一种新方法。
