一种可移动式水果采摘收集装置设计及使用方法
2021-12-14王丽娟刘志刚喜冠南彭超华
王丽娟刘志刚喜冠南彭超华
(1.南通科技职业学院机电与交通工程学院,江苏 南通 226007;2.南通大学机械工程学院,江苏 南通 226019)
1 设计背景
我国是水果生产大国,人们对水果的需求和品质都提出了很高的要求。如何对水果进行快速有效采摘以及在采摘过程中保护水果品质尤为重要。事实上,受制于传统的果园管理和水果采摘、收集技术,果农在生产过程中损失的水果数量不计其数。在实践中主要面临问题有苹果类水果生长过高以及分布不均匀导致不易采摘;桃子类多汁且脆硬水果在采摘过程中容易碰伤导致水果不易存储,进而影响水果品质。
本文所设计的可移动水果采摘收集装置,无损状态下快速准确采摘水果的同时,在水果掉落的过程中对水果进行合理的减速,避免水果因过大的动能而造成表面碰伤。切实降低果农的劳作强度、降低过程成本、提高果园生产率、提高水果品质,促进我国的果园种植业的进步,追踪世界前沿农业技术,推动我国水果采摘的机械化发展。
2 研究现状
当前,我国市场上的水果采摘辅助装置,主要分为机械装置和机器人2类[1]。对机械装置进行研究发现,大多数机械装置以机械臂为基础,通过机械结构实现采摘,但这种方式对于机械臂的精确度以及使用方便度提出了较高要求,且不便于随身携带[2,3]。从20世纪90年代起,我国相关科研院所也逐渐开始对智能化水果采摘机器人及设备进行研究。结合我国的果园种植地理条件,我国南方的果园大多处于丘陵山区,属于坡地,因此合适的采摘机械很少,在危险性方面的问题也更加突出。由于工作环境的复杂性,采摘机器人的发展仍未达到农业生产的要求,尤其是视觉识别与行走装置,距离实用化和商品化还有一定距离[4]。
通过上文对水果机械采摘技术进行比较分析可知,国内外科研人员在该领域作了许多研究工作,但水果采摘是极其复杂的系统工程,目前仍有不少难题没有解决。如,针对水果采摘的前端执行系统研究较多,但对末端存储系统研究不足;前端执行系统以精密机械采摘手臂、采摘机器人为主,对于我国以自主分散经营为主的果农而言,实用性不尽如人意。
因此,操作简单,实用性强并兼具采摘、缓冲收集水果、利于山地移动的可移动水果采摘收集装置的相关研究显得尤为重要。
3 设计介绍与工作原理
3.1 总体设计介绍
可移动式水果采摘收集装置如图1、图2所示,由采摘器、承载小车、控制箱和收集箱组成,采摘器主要包含伸缩管、牵拉机构、剪切刀、柔性网筒,收集装置主要由承载小车、控制箱和收集箱3大系统构成。
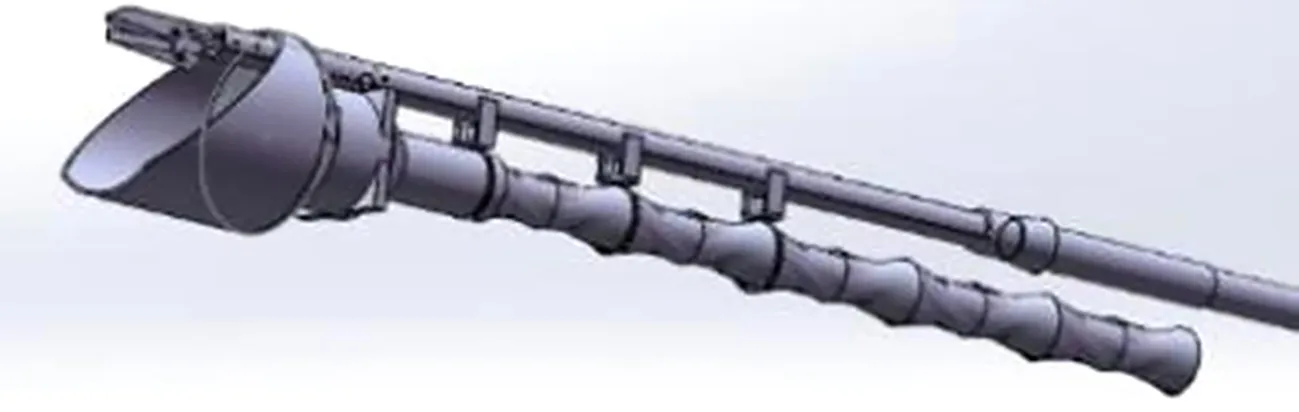
图1 可伸缩单果采摘杆结构示意图

图2 可移动收集装置示意图
当确定采摘对象后,按压采摘器手柄使得牵拉机构驱动剪切刀作业将切落水果坠于柔性网筒内,水果经由网筒滚落而下,从收集装置采集口经由缓冲板落入收集箱转筒,经历第1次减速,旋转电机控制带动转筒水平旋转,转筒将其内部的水果带至缓冲板的掉落口,水果通过滑落轨道进入收集盒,对水果进行第2次减速,整个过程水果的动能较小,降低了水果之间互相碰伤的概率。该装置操作简单、价格低廉、结构新颖、实用性强,适用于不同高度的、多种类水果的采摘、收集作业。作业实施过程如流程图3所示。
3.2 可伸缩采摘器的设计
可伸缩采摘器如图4所示,采摘器主要包括伸缩管、牵拉机构、剪切刀、柔性网筒4个部分。伸缩管的一端铰接有手柄,伸缩管的另一端插接有剪切刀,牵拉机构连接于伸缩管的管身,手柄经由牵拉机构与剪切刀连接;网筒连接于伸缩管的下侧,并且网筒的一端开口与剪切刀相对,另一端开口沿伸缩管的管身延伸至手柄下方;按压手柄使得牵拉机构驱动剪切刀作业将切落水果坠于柔性网筒内,并且水果经由网筒滚落而下,落入收集小车内[5]。
3.3 收集箱的设计
3.3.1 结构设计
收集箱的主要作用是蓄存落下的水果。收集箱中间设置缓冲板,缓冲板采用弹性塑料制成,上方铺设有缓冲材料海绵。该缓冲板将收集箱分隔为2部分,缓冲板的上方为缓冲腔室,缓冲腔室的顶板设有采集口,采集口入口处装有红外计数器,缓冲板下方为收集盒。
缓冲板中央和收集盒的底板中央均设有通口,一立柱穿过通口安装在收集箱内部,立柱的底端固定在承载小车上,立柱顶端设有法兰,法兰通过连接臂与若干上下开口的转筒相连(样机为四转筒设计),立柱内部设有旋转电机,旋转电机的输出轴与法兰相连,驱动其水平旋转。缓冲板上还设有掉落口,掉落口与采集口不处于同一竖直直线上;掉落口连接一滑落轨道,滑落轨道的出口连接于收集盒内。示意图如图5、图6所示。
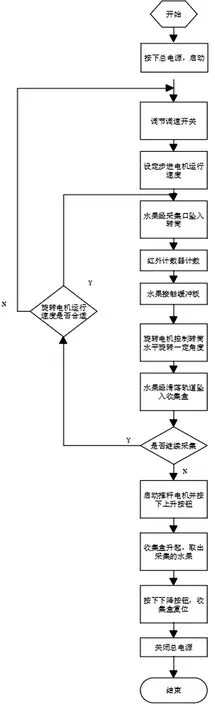
图3 水果采摘收集流程图

图4 可伸缩单果采摘杆结构示意图

图5 无顶盖可移动收集装置示意图

图6 可移动收集装置侧面示意图
3.3.2 水果收集
开启动力源后,设定旋转电机步进运行速度,经由采摘器柔性网兜滑落的水果经缓冲板上方的采集口落入转筒,接触到缓冲板,红外计数器计数,同时将信号传输至单片机,单片机控制旋转电机带动转筒水平顺时针旋转90°,转筒将其内部的水果带至缓冲板的掉落口,水果通过滑落轨道进入收集盒,完成一次水果收集。同时,完成一次收集后,下一转筒恰巧位于采集口下方,为下一次水果收集待命。整个收集部分的工作可以通过调速开关调整旋转电机运行速度从而适当调整收集的速度,提高收集工作的效率。
3.3.3 水果满仓取出
收集箱内部边缘竖直安装有滑动导轨,其上设有可上下滑动的滑块轴承,滑块轴承的外端安装在收集盒的侧面与连杆活动连接,连杆与推杆电机的输出端活动连接,推杆电机与单片机电性相连。推杆电机在单片机信号的激励下做水平方向的往复运动,而滑块轴承在连杆的带动下在滑动导轨上从动地做竖直往复运动,进而带动收集盒的一端升起或落下。
采摘完成或收集盒满仓时,通过推杆电机提供动力,连杆推动滑块轴承工作,将收集盒升起,便于快速取出收集好的水果,大大提升了取出水果的便利性。
3.4 控制箱的设计
控制箱的主要作用为提供动力源、控制收集与取出水果。
3.4.1 动力源
采用蓄电池作为动力源。控制箱的外部设置太阳能电池板,将太阳能电池板与蓄电池电性相连,使其可以为蓄电池充电,动力源可以循环使用,符合当下节能环保的社会风潮。
3.4.2 控制系统
控制箱设有单片机,单片机与旋转电机、推杆电机、红外计数器和若干按钮电性相连。按下启动按钮开启动力源后,通过设置旋转电机转速按钮设定合适的采集速度,当采摘水果触发红外计数器后,将其信号传输至单片机,单片机控制旋转电机开启,带动转筒水平顺时针旋转90°,转筒将其内部的水果带至缓冲板的掉落口,水果通过滑落轨道进入收集盒,完成一次水果收集。
推杆电机与单片机电性相连。推杆电机在单片机信号的激励下做水平方向的往复运动,而滑块轴承在连杆20的带动下在滑动导轨上从动地做竖直往复运动,进而带动收集盒的一端升起或落下。
3.5 承载小车的设计
上述收集箱与控制箱都设置在承载小车上,承载小车主要起到承载收集箱、控制箱与实现移动收集的作用。考虑到果园一般在丘陵山地等地区,承载小车设计为四轮结构,后部的车轮上设置有碟式刹车,由一手柄控制启闭,手柄内带有棘轮,可以控制档位。如此,该水果收集装置在采集水果的时候,不会因为地形有坡度而自行滑动,为采集活动带来不便或额外损失。
4 使用效果分析
为验证所设计的采摘收集装置的使用效果,在苹果园内选取果实密度与树干高度相近的两颗果树进行采摘,展开试验,将本文所设计的采摘收集装置与传统徒手采摘的效果进行对比与分析。
试验人员为果园内工作人员,徒手采摘组2人为1组,采摘收集装置组1人单独操作,2组的采摘人员为同一人。徒手采摘组的采摘方法为1人徒手或借助剪刀进行采摘,1人进行果实收集与装箱,对于高处的苹果可借助梯子类工具进行采摘。采摘收集装置组的采摘方法无需借助梯子类工具,单人独立操作完成采摘与果实收集。采摘时间均为10min,采摘员自下而上进行采摘,每2min记录1次数据,经统计,数据结果如表1和图7所示。

表1 苹果园采摘效果对比

图7 苹果园采摘效果对比
对比发现,在节省1个人力的情况下,采摘效率提高了1.96倍。对于果实生长高度较高的果实,无需借助梯子等工具,可伸缩采摘杆的优势得到了充分发挥,可移动收集小车则节省了果实传递与装箱的时间,采摘更加便捷轻松。基于此,可以认为本设计具有一定的合理性与可行性。
5 结论
本文所设计的可移动式水果采摘收集装置体积小,可移动,便于携带;操作简单,实用性强;减速缓冲,保护水果,提升品质;价格低廉,易于推广;适用于不同高度的、多种类水果的采摘作业。其不仅能够降低果农的劳作强度、降低过程成本、提高果园生产率、提高水果品质,还能促进我国的果园种植业的进步,追踪世界前沿农业技术,推动我国水果采摘的机械化发展。
采摘者只需将采摘器伸缩杆调至合适长度至果实的果柄部位,按钮手柄控制剪切刀头,水果自动滚落至收集箱,操作简单,无需冗余动作;对所采摘单果的大小、高度基本没有限制,因此,适用范围很广,使用便利;另外,在水果滚落及收集过程中实施多重保护,减少水果磕碰,提升果品品质,是我国以自主分散经营为主的果农的首选,经济效益及社会效益显著。
