基于光纤布拉格光栅的精细化多维力触觉传感器结构设计与仿真研究
2021-12-13曾佳欣熊鹏文龚思瑾
曾佳欣,熊鹏文,,张 强,龚思瑾,黄 鑫
(1.南昌大学信息工程学院,江西 南昌 330031; 2.东南大学仪器科学与工程学院,江苏 南京 210096)
0 引 言
微创手术是指将手术器具通过一个极小的切口运送到人体内切除病理组织的现代手术,例如胸腔穿刺引流手术便是在人体胸腔内积液过多时通过专业的穿刺引流针将积液抽取出来的精细化微创手术[1]。在实际操作时,微创手术尚有一些缺点使其在医院里难以实施,如手术中使用的细长器械会降低医生对接触力的感知能力,并且实操中手术器械所受的力来自不同的方向,若不能准确感知手术中各方向的接触力信息,就难以实现手术仪器的精准操作,此时我们需要用到多维力触觉传感器;多维力触觉传感器指一种能同时测量两个方向以上力分量的传感器,相对单维力传感器可测得更加丰富的接触力信息,通过多维力触觉传感器医生能得到更精准的接触力信息,更好判断自身所施加力是否合适,手术的安全性也大大提升。
近年来,多维力触觉传感器和电子皮肤触觉传感器以其广泛的用途和巨大的市场取得了极大的发展,有了很多的成果。宋爱国[2]概述了近50年来机器人触觉传感技术的发展情况,并对现有触觉传感技术进行了总结;邱澜[3]等总结了机器人可延展柔性电子皮肤的研究进展;张津源[4]提出了基于三维多孔微结构复合导电材料的新型触/压觉传感器;胡广宇[5]提出了极端环境下多维力触觉传感器基于线性方法的容错解耦方法及利用非线性BP神经网络进行信号补偿的容错解耦算法;曹建国[6]等综述总结了国内外近年来电子皮肤触觉传感器的研究进展与发展趋势;汪浩鹏[7]提出了一种基于AgNWs、PDMS和压阻橡胶的新型高柔弹性电子皮肤,可较为精准的测量接触压力;张庭[8]提出了一种基于触觉传感器信息反馈的动态抓取控制方法,提高了假手的触觉感知及稳定抓取功能;徐菲[9]提出了一种基于新型力敏导电橡胶的柔性三维触觉传感器,实现了兼有柔韧性和三维力检测功能的传感器设计。
为推进精细化微创手术在医学界的应用[10],使医护人员在手术中能获取更精准丰富的接触力信息,本文设计了一种基于光纤布拉格光栅传感的精细化多维力触觉传感器,推导其传感原理,分析其构型设计,并进行受力模拟仿真验证其传感性能的优势。
1 光纤布拉格光栅传感器传感原理
1.1 光纤光栅
光纤光栅的分类方法很多,根据光栅的折射率及其调制深度可分为光纤布拉格光栅、长周期光纤光栅、倾斜光纤光栅和啁啾光纤光栅等,本文选用光纤布拉格光栅。作为最早出现的光纤光栅之一,FBG具有体积小、质量轻、精度高、抗电磁干扰的优点,在许多领域都有广泛应用,在医学微创手术传感领域也有着远大的应用前景。
1.2 光纤布拉格光栅的传感原理
FBG的纤芯折射率沿光纤轴向呈周期性变化,当光源发出的光进入光纤纤芯,到达FBG时,一定范围内波长的光会被反射回来,另一部分光继续透射过栅区前进。由光纤光栅的Bragg方程可得反射光的中心波长公式:

式中:λB——反射光中心波长值;
neff——光纤纤芯有效折射率;
Λ——光栅周期。
由式(1)可得,反射光中心波长值λB随光纤纤芯折射率neff与光栅周期 Λ的变化而变化[11],而外界物理量参数如应力应变和温度的变化会使neff和Λ发生改变,继而导致反射中心波长产生偏移,通过光纤光栅解调器等设备测量出反射中心波长偏移量,即可推出应力应变或温度的值,实现应力与温度的传感。
由于FBG具有的弹光效应,应力应变会导致光纤纤芯的折射率产生变化;且应力会使光纤产生形变,进而导致光栅的周期发生改变。在式(1)两侧对应力进行求导可得反射光的中心波长值变化公式:

其中,P和εX分别为FBG的有效弹光系数和其所受的应力应变。
温度带来的热光效应会导致光纤纤芯折射率发生改变,且温度产生的热膨胀效应也会使FBG形变导致栅区周期的改变[12]。在式(1)两侧对温度进行求导推出反射中心波长值与热光系数和热膨胀系数关系的公式:

热光系数常用 ε表示,ε=dneff/neffdT是光纤纤芯折射率随温度的变化率;热膨胀系数 α是温度升高1 ℃时单位长度或单位体积物体长度或体积的变化量,记作α=dΛ/ΛdT。由此可得温度对FBG的影响公式:

结合式(2)和式(4)即可得出应力应变和温度的变化对FBG反射中心波长的影响公式:

2 光纤布拉格光栅传感器结构设计
2.1 传感器的整体结构设计
医学微创手术中,力触觉信息的获取相当重要,掌握准确的力触觉信息有助于医生实现手术工具的精准操作;而要得到实时精准的接触力反馈信息往往需要使用传感器,借由在相关手术器械上安装力触觉传感器,医护人员能通过获取的实时反馈力信息检测人体病理组织,选择最优的手术方案完成治疗。
传统的胸腔穿刺引流等精细化微创手术传感器大都只能感知手术中产生的轴向力信息,而无法获取扭矩力和径向力反馈信息,且由于结构上的不足接触力的反馈效果也时常不尽如人意。本研究针对微创手术中接触力感知缺乏及无法获取不同方向力触觉信息的问题,设计了一种基于FBG的精细化多维力触觉传感器,该穿刺引流针传感器能同时感知手术中所受的轴向力、扭矩力和径向力,经后续进行的传统结构和新型结构传感器受力模拟仿真结果对比,证明该多维力触觉传感器对各个力应变的检测效果皆有所提升。
本文在常用穿刺引流针的基础上参考手术实际需求,经过力学结构分析使用SOLIDWORKS软件设计了传感器的结构,如图1所示为软件绘制的光纤布拉格光栅传感器3D构型图,图1(a)为穿刺引流针的整体构型图,图1(b)为其外部引流套管,图1(c)为内部穿刺针,其针柱上制有凹槽结构(d)部分[13],在(e)部分的针尖顶部制有一个槽,槽中放有两个空心管道,另外在(f)部分将穿刺针针尖设计为空心结构,并且拆分为上下两部分,其内部放有空心圆管,管道的4个尽头略微凸出针尖壁0.1 mm。
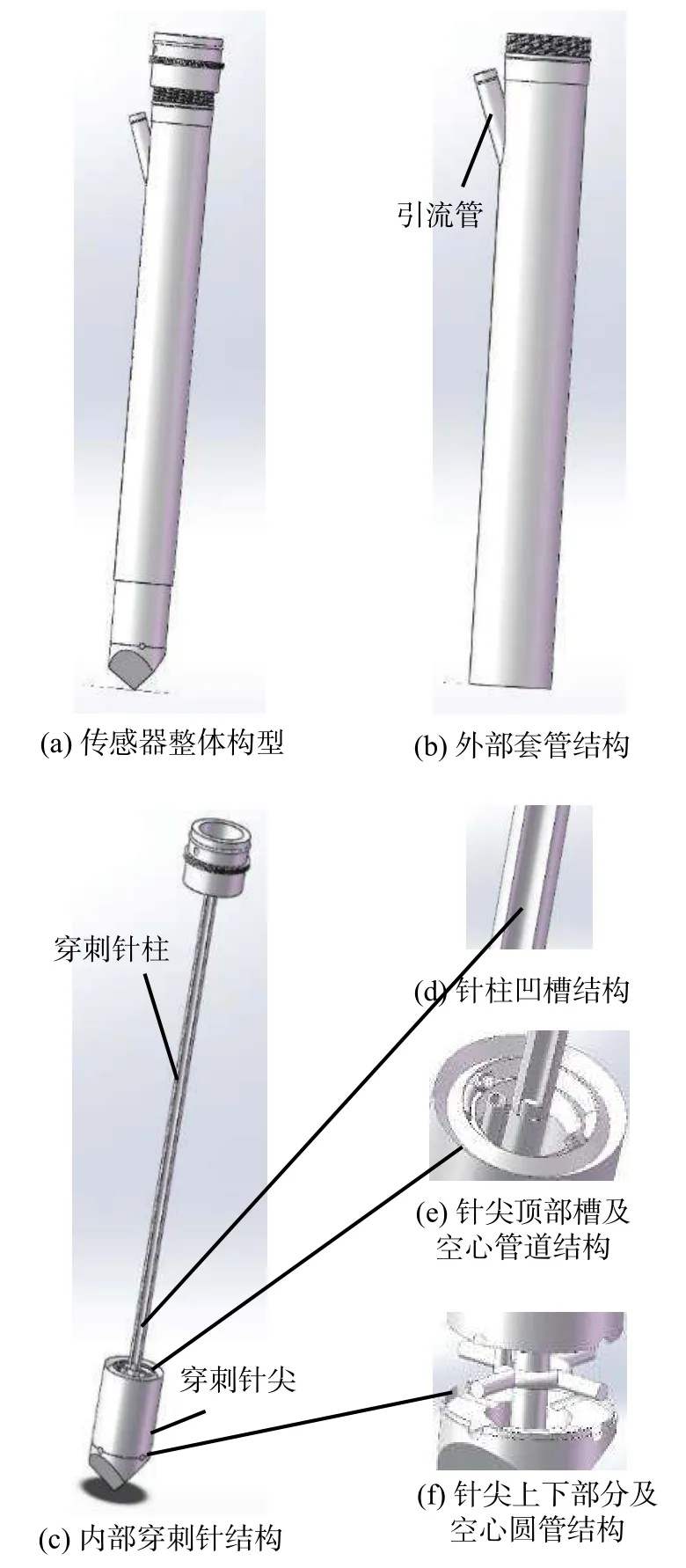
图1 光纤布拉格光栅传感器构型图
要使穿刺针传感器能检测到手术穿刺过程中的力触觉信息,需在其相应部位上粘贴FBG作为传感元件感受其所受的应力应变。本研究选取几个光纤布拉格光栅分别作为轴向力传感元件、扭矩力传感元件和径向力传感元件,其中将轴向力传感元件FBG编号为FBG1,再选取2个扭矩力传感元件FBG并分别编号为FBG6、FBG7,径向力传感元件选用写入4种不同周期光栅的分叉光纤,将它们分别编号为FBG2、FBG3、FBG4和FBG5。如图2所示为微创手术中光纤布拉格光栅传感器的受力分析图,手术时穿刺针穿刺进入人体胸腔,与人体组织发生相互作用,穿刺针柱会受到一个轴向力Fa并产生形变,将轴向力传感元件FBG1粘贴在穿刺针柱凹槽内即可实现轴向力应力应变的检测[11];穿刺过程中针尖顶部槽内会受到一个扭矩力M的影响,槽中的空心管道受力发生形变,产生应力,将扭矩力传感元件FBG6、FBG7分别粘贴在两个空心管道的内壁上感受应力的影响,进行扭矩力应变的检测;穿刺时径向力Fr会在凸出针尖壁的4个空心管道尽头面上产生,使空心圆管产生形变,将径向力传感元件分叉光纤放入空心管道内并分别粘贴4个FBG在空心管道尽头面内壁上,可完成径向力应变的测量。
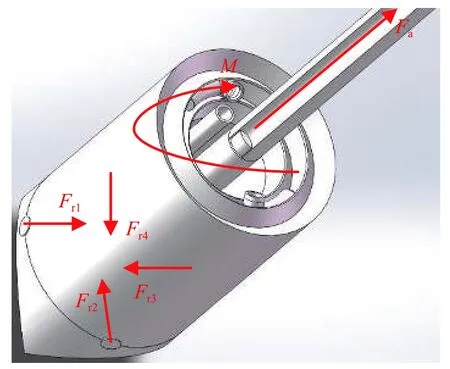
图2 光纤布拉格光栅传感器受力分析图
如图3所示为各光纤布拉格光栅的粘贴结构示意图,本研究将轴向力传感元件FBG1粘贴在针柱凹槽内检测轴向力的应力应变,扭矩力传感元件FBG6、FBG7各自集成在针尖顶部槽内的两个空心管道内壁上感应扭矩力应力应变,径向力传感元件分叉光纤放入针尖内空心圆管并将其4个FBG分别一端粘贴在对应管道尽头面上,另一端粘贴在管道内壁上,完成径向力应力应变的检测。
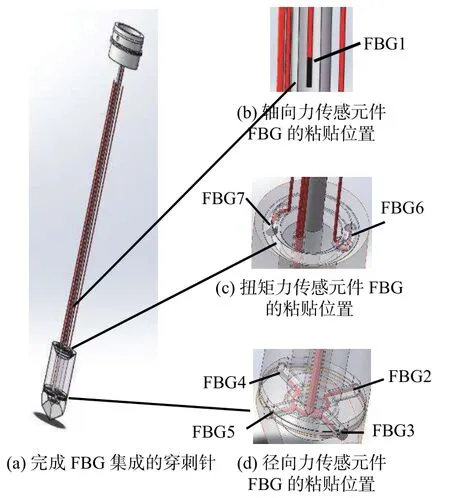
图3 FBG粘贴结构示意图
2.2 光纤布拉格光栅传感器的构型分析
本研究在现实中通用的穿刺针结构基础上,结合手术实际需求设计了能够检测多维力的新型结构穿刺针传感器,其改进之处主要体现在轴向力应变、扭矩力应变和径向力应变的相关检测结构上。
在轴向力应变的检测上,本设计在穿刺针柱表面制有一个凹槽。考虑实际手术中穿刺针需要刺入人体胸膜腔抽取积液,针的尺寸需要足够微小,这里设计穿刺针柱的半径为2 mm,针尖半径为10 mm,针柱凹槽的制作方法为以原先的圆柱体针柱底面离圆心一定距离的一点为圆心绘制一个一定半径的圆,再用该圆拉伸切除过整个针柱。本研究对凹槽的尺寸设计进行了对比分析,在切除圆与针柱底面圆圆心距为2.5 mm的情况下,制作了多个切除圆半径不同的穿刺针模型并分别进行了轴向力受力仿真,如表1所示为穿刺针不同凹槽尺寸受力模拟分析结果,随着圆半径的减小,产生的应力强度也越来越小,由此可得切除圆的半径应设为1.4 mm,可得到最佳的轴向力检测效果。凹槽的设计能提升穿刺针结构对轴向力的敏感度,增加传感器测量轴向力的精度,同时凹槽结构也使FBG的集成较原先更为便利。

表1 穿刺针不同凹槽尺寸受力模拟分析结果
在扭矩力应变的检测中,本设计在穿刺针尖顶部制作有一个槽,槽中放有两个空心管道。在传统设计中,为检测穿刺针所受的扭矩力通常会在其针柱上安放一个轮辐式弹性梁结构,然而该结构仍会受到轴向力影响扭矩力的测量精度,本文直接在穿刺针尖的顶部制作一个宽度为2 mm的槽,槽内放入两个内径为1.5 mm、外径为2 mm的空心管道,再在空心管道内集成光纤布拉格光栅,实现扭矩力的检测。该设计能增强扭矩力的应力应变强度,提升检测扭矩力的灵敏度。
在径向力应变的检测中,本研究将穿刺针尖设计为空心结构,并且拆分为上下两部分以方便在其内部放入空心管道,管道的4个尽头略微凸出针尖壁0.1 mm。后续对设计的穿刺针进行了径向力的受力模拟分析,在凸出的管道尽头面上施加了径向力载荷,仿真结果显示空心管道最大应力强度较大,应力敏感区域较广,可得到良好的径向力应变检测效果。
2.3 光纤布拉格光栅传感器的受力仿真
本研究在传统穿刺针的基础上提出了一种适用于胸腔穿刺引流等精细化微创手术的光纤布拉格光栅多维力触觉传感器结构设想,能够同时感知手术过程的轴向力、扭矩力和径向力。为了验证改进的传感器结构是否合理可行,相对传统的穿刺针是否具有更佳的传感性能,本文分别将传统穿刺针传感器结构和设计的新型穿刺针传感器结构导入有限元分析软件ANSYS进行受力模拟分析,对比分析二者在受到同等大小的轴向力、扭矩力或径向力时,新型构型传感器的形变量是否较大,产生的最大应力应变强度及应力敏感区域是否有所提升,进而得出新型传感器传感性能是否更佳[11]。
2.3.1 有限元分析操作步骤
有限元分析分为静力学分析、模态分析、热分析等多个种类,此处我们需要用到静力学分析。首先打开 ANSYS Workbench 软件,在 Toolbox(工具箱)窗口选择 Analysis Systems(分析系统)中的Static Structural,即静力学分析模块;其次双击打开Static Structural模块的 Engineering Data 单元格设置组成结构体的材料属性,这里我们使用软件初始默认的 Structural Steel结构钢材料;再次设置Geometry单元格将SOLIDWORKS绘制的穿刺针模型导入进来;最后双击Model单元格进入ANSYS Mechanical分析程序,对模型进行网格划分,这里本研究直接采用软件自主划分网格,并且分别施加载荷和约束,求解受力模拟仿真结果。
2.3.2 模型的建立
在ANSYS有限元分析中,模型可在Workbench软件中自行创建,也可从其他建模软件中直接导入[14],本文使用SOLIDWORKS软件绘制出穿刺针模型,并导入Workbench中进行受力仿真。如图4所示为导入DesignModeler的穿刺针模型,针尖的半径为10 mm,针柱的半径为2 mm,针尖内部和顶部空心管道的内径为1.5 mm,外径为2 mm。模型导入后进行网格划分,划分的单元类型为Solid186,单元数目为27 316个,节点数目为54 225个,在穿刺针的底座面上施加有一个固定约束。本研究计划对穿刺针传感器模型分别进行轴向力、径向力和扭矩力的受力模拟仿真,通过对比新型结构穿刺针与传统结构穿刺针的仿真结果数据来验证改进的传感器传感性能是否更佳。
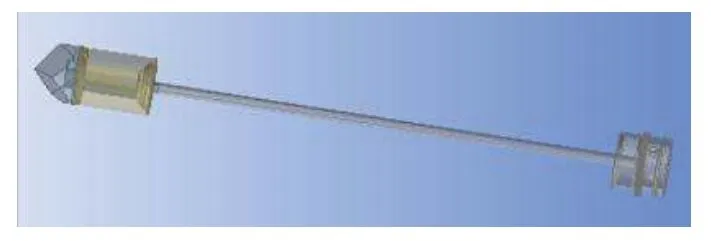
图4 SOLIDWORKS导入 DesignModeler的穿刺针模型图
2.3.3 结构静力学分析
在轴向力应变的检测中,本设计在穿刺针柱表面挖有凹槽。分别对传统构型的穿刺针柱和新型的穿刺针柱施加相同的轴向力载荷,其中新型穿刺针的载荷施加面为其针尖内空心管道的4个尽头面,传统结构穿刺针的载荷施加面为其针尖壁上与新型穿刺针空心圆管尽头面面积相等的4个圆形区域,对各自4个面分别施加4个3 N的与针柱平行方向的轴向力,合计为12 N,进行受力模拟仿真求解,如图5所示为解得的二者位移云图),在各自受到12 N大小轴向力载荷时,新型穿刺针的最大形变量为0.011 857 mm,传统穿刺针的最大形变量为0.000 956 61 mm,在针尖处穿刺针的形变量最大,距离针尖越远,模型形变量越小。由此可得,穿刺针柱的凹槽结构能够提升应力应变强度,提高轴向力检测的灵敏度,并且将轴向力传感元件FBG1集成在穿刺针柱凹槽内接近针尖部位可使其感受到最大的轴向力应力应变强度。
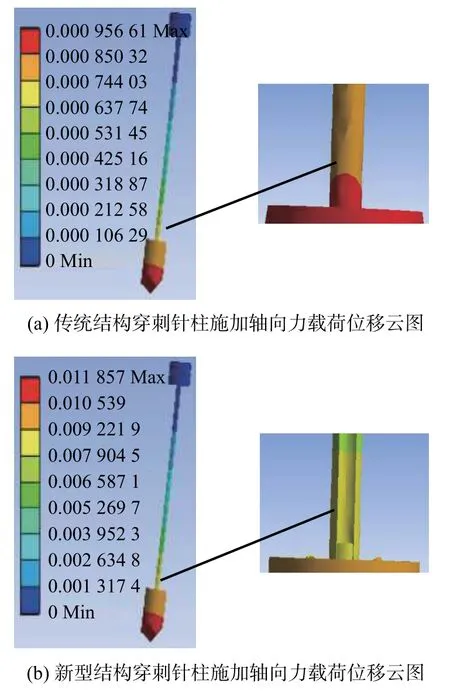
图5 传统结构与新型结构穿刺针柱施加轴向力载荷仿真位移云图(单位:mm)
在径向力应变的检测中,本研究将穿刺针尖设计为空心结构并在其内部放入空心管道,管道的4个尽头凸出针尖壁0.1 mm。分别对传统构型穿刺针尖和新型穿刺针尖施加同等大小的径向力载荷,其中新型穿刺针载荷施加面为空心管道的4个尽头面,传统构型穿刺针载荷施加面为其针尖壁上与新型穿刺针空心管道尽头面等大的4个圆形区域,分别施加4个3 N的垂直于各自4个面的径向力,进行受力模拟分析求解,如图6所示为解得的二者压力云图,当施加相同径向力载荷时,新型穿刺针的空心管道产生的最大应力强度为3.855 7 MPa,相对传统穿刺针尖壁的1.212 1 MPa更高,应力敏感区域也更为广阔,且在空心管道4个尽头面上产生的应力应变最大。由此可得,改进后穿刺针的结构设计能提升其应力强度,增大其应力敏感区域,并且将径向力传感元件分叉光纤的4个FBG各自粘贴在针尖空心管道4个尽头面内壁上可得到最佳的穿刺针径向力应力应变检测效果。
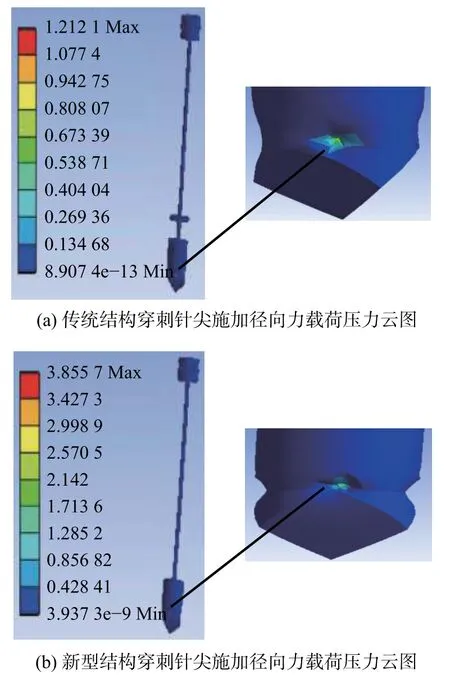
图6 传统结构与新型结构穿刺针尖施加径向力载荷仿真压力云图(单位:MPa)
在扭矩力应变的检测中,本设计在穿刺针尖顶部制作有一个槽,槽内放有两个空心管道。分别对传统构型和新型的穿刺针施加5 N·mm的扭矩力载荷,其中传统构型穿刺针的扭矩载荷施加处为其针柱上所固定弹性梁的外轮毂,新型穿刺针的扭矩载荷施加处为其针尖顶部槽面,进行受力分析求解,如图7所示为解得的二者各自的位移云图,在分别受到5 N·mm大小扭矩力载荷的情况下,新型结构穿刺针的最大形变量为0.004 807 mm,大于传统穿刺针的 0.004 439 7 mm。由此可得,穿刺针尖顶部的槽及空心圆管结构能够提升扭矩力应变强度,增加扭矩力检测的精度,增强传感器检测扭矩力的传感性能。
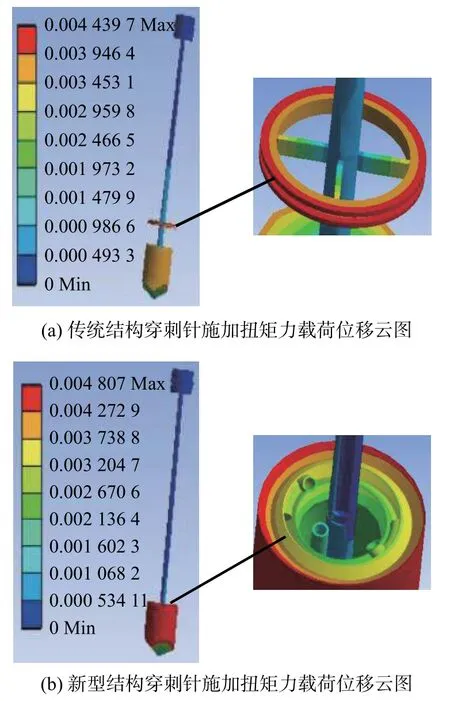
图7 传统结构与新型结构穿刺针施加扭矩力载荷仿真位移云图(单位:mm)
如表2所示为传统结构和新型结构穿刺针施加各种载荷的最大形变量与最大应力强度,在受到的载荷相同时,新型结构穿刺针的最大形变量与最大应力强度均比传统构型穿刺针大。由此可得改进后的新型穿刺引流针传感器相对传统结构轴向力、径向力和扭矩力的检测灵敏度皆有所提升,具有较优良的传感性能。
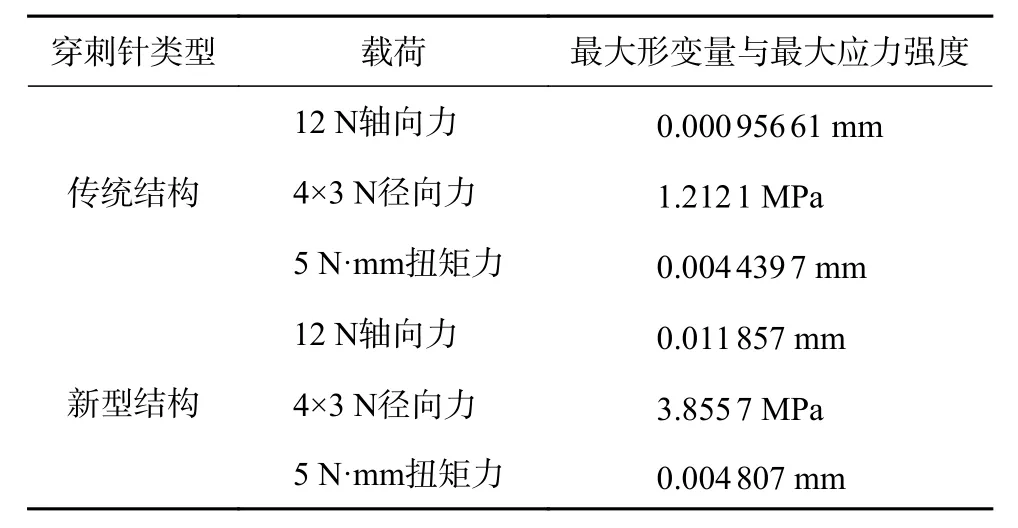
表2 传统结构和新型结构穿刺针的静力学分析结果
3 结束语
本文针对胸腔穿刺引流等精细化微创手术中接触力反馈不佳及无法感知不同方向力触觉信息问题,设计了一种基于光纤布拉格光栅的精细化多维力触觉传感器,该穿刺引流针传感器能同时感知到穿刺过程中所受的轴向力、扭矩力及径向力。同时,对FBG的传感原理及触觉传感器的构型设计进行了介绍和分析,并采用有限元分析软件ANSYS对传感器结构进行各个力的受力模拟仿真,仿真结果显示改进后新型的传感器相比传统构型最大应力强度与应力敏感区域皆有所增大,能够更精准的检测手术穿刺过程中的轴向力、扭矩力和径向力,实现三维空间中各方向力的感知。
