巡线机器人的刚柔耦合动力学特性仿真研究
2021-12-13李刚俊郭成操黄杨森
苏 睿,李刚俊,郭成操,张 欢,黄杨森
(1.成都工业学院智能制造学院,四川 成都 611730; 2.中国东方电气集团有限公司,四川 成都 611731)
0 引 言
输电线路是我国电力系统的重要设备,承担电力配送和传输的重任。定期巡视和检查线路是电力部门的重要日常工作[1]。相对于人工线上作业,输电线路机器人因具备减少人工、提高效率、有效消除工作盲区等优势,在输电线路的巡检、除冰、清障等领域得到广泛的应用。
自20世纪80年代起,多国开展了线路机器人的研制,并在机构、控制、通信、电磁兼容等技术问题取得了突破。例如,加拿大魁北克水电研究院的HQ LineRover机器人、日本Hibot公司的Expliner机器人、日本东京电力公司的OPGE、美国TRC公司的悬臂巡线机器人等[2-3]。自20世纪90年代起,国内部分科研院所和高校开始了输电线路机器人的研发。例如,中科院自动化所的三臂悬挂式巡检机器人、武汉水利大学的架空高压线路巡线小车。国防科技大学、武汉大学等高校以及国家电网、南方电网等企业也围绕输电线路机器人进行了研发、应用[4-5]。
国内外围绕机器人动力学建模仿真,开展了大量而深入的研究,相关模型更是其机械结构、控制策略以及电力电子控制方案的基础,机器人的动力学模型精确度更是直接影响机器人控制效率和工作成效,主要包括哈密尔顿法[6]、拉格朗日法[7]、牛顿-欧拉法[8]等,重点从机器人本体的系统角度进行建模,具有较为突出的高阶非线性特征[9]。
为提高输电线路、索具等典型柔索的动力学分析计算效率和精度,国内外学者进行了大量的研究,已有研究文献采用离散刚体[10]、绝对节点坐标[11]、连续体[12-13]等方法对柔索进行等效建模,并开展相关动力学仿真分析[14-16]。
综上所述,国内外对机器人和输电导线相关柔索系统的动力学特性分析已分别做了相当多的研究工作,但对类似以柔索为作业路径的机器人研究,集中于机器人本体设计制造以及巡检、除冰、清障等基本功能的实现,柔索上机器人的动力学特性以及机器人与柔索等作业环境刚柔耦合问题的相关研究报道较少。因此,对输电线路巡线作业机器人进行系统深入的动力学研究,具有极其重要的理论意义和工程应用价值。故本文建立输电线、机器人以及铁塔的刚柔耦合模型,进行机器人在线移动时的动力学相关分析,为后续机器人的进一步优化提供技术参考。
1 机器人线上运动学与动力学分析
1.1 运动学分析
输电线路由于柔性大、档距大,电线的质量沿线长均匀分布,输电线路线路材料的刚性影响可以忽略,会使输电线呈现两端高、中间低的垂悬链状,其悬垂角一般为5°~12°;当地况复杂,如通过高差较大的山区时,悬垂角可达20°~25°,超过 25°的悬垂角较为罕见。
机器人本体所覆盖的导线较短,将其所覆盖的导线设为直线,且与机器人本体长度方向平行。机器人利用主、从动轮在输电线路上稳定行走,针对机器人上行和下行的两类工况的质心进行力学分析,建立两轮与输电线之间的压力、摩擦力、阻力矩、驱动力矩等参数的关系,上行分析如图1(a)和式(1)所示,下行分析如图1(b)和式(2)所示:

图1 机器人线上移动力学分析
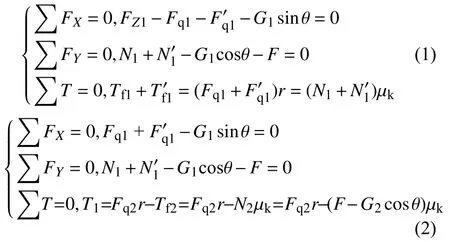
式中:r——主动轮、从动轮的半径;
µk——滚动摩擦系数;


1.2 动力学分析
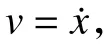
式中:KM1——左臂电机磁场波形系数;
Ka1——左臂电机利用系数;
L1——左臂电机电枢回路的电感;
R1——左臂电机电枢回路的电阻;
i1——左臂电机电枢电流;
U1——左臂电机电枢电压;
Ua1——关节电机电枢逆电势。
考虑到输电线路弧垂的影响,设左右臂电机旋转角差值为Δθ,J为机器人本体绕X轴的旋转惯量,τ3为机器人所受总外力,联合机器人左右臂电机的电枢电压平衡方程,得到机器人本体的动力学方程为:
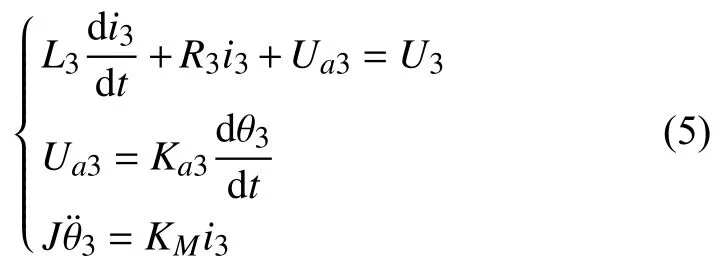
将式(3)~式(5)进一步联立,统一其形式如式(6)所示,包括电机动力学方程与机器人臂的动力学方程:
式中:P、Q——电机常值,由电机性能参数决定;
θ——机器人臂电机的转动角度;
i——机器人臂驱动电机的电枢回路电流;
L——电感;
R——电阻;
U——电压;
Ka——电机利用系数;
KM——磁场波形系数。
2 刚柔耦合系统建模
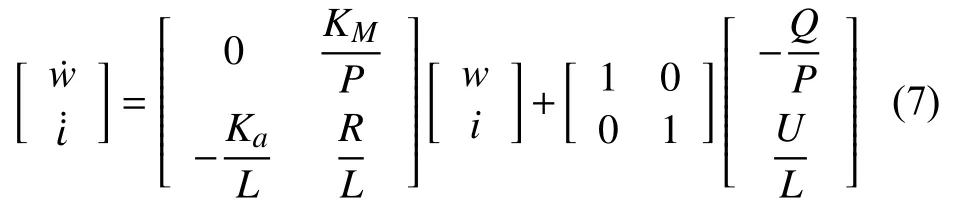
以110 kV、均高30 m,档距100 m的铁塔和输电线为载体。机器人选择轮腿式双臂巡检机器人,质量25 kg,机器人左右臂两个滚轮驱动电机额定输出转矩均为15 N·m。采用UG软件创建铁塔、机器人三维实体模型,通过连续体法创建输电线三维模型,并设置装配约束如表1所示。采用parasolid转换模块将模型转化为.X_T格式文件导入ADAMS中,并定义柔/刚体、添加运动副、去除冗余约束,如图2所示。进行求解器设计和仿真参数设置,如表2所示。

表1 系统装配约束设置
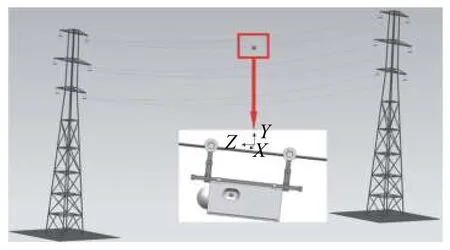
图2 机器人-线-塔刚柔耦合动力学模型
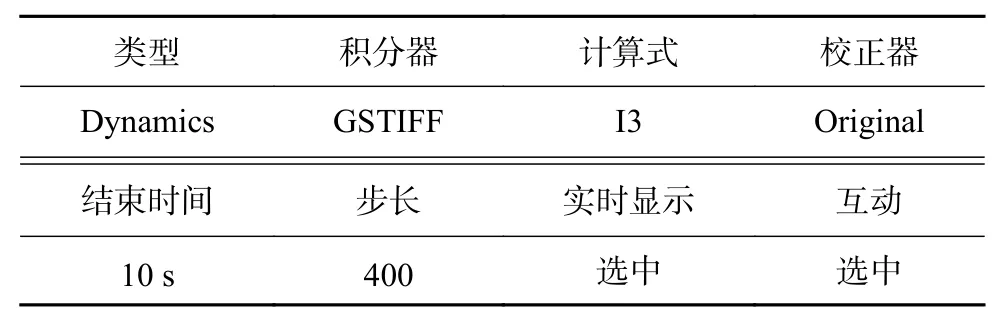
表2 求解器和仿真参数设置
3 仿 真
仿真运行10 s,步长为400,利用后处理模块,获得机器人质心位移、速度、加速度如图3~图5所示。
由图3质心位移曲线可知,机器人在X方向位移保持为0,即位移均在YZ方向发生,第5 s时,Z方向位移出现峰值并逐步返回,Y方向位移在10 s内出现两个波谷,因输电线的柔性所致在第10 s时位移并未恢复为0。
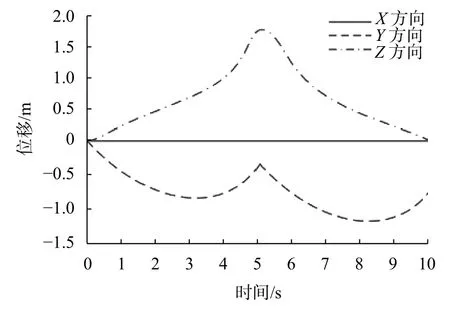
图3 质心X、Y、Z方向位移
由图4质心速度曲线可知,机器人在X方向速度保持为0,即速度仅在YZ方向存在,5 s时,由于输电线柔性导致的垂度,Z方向速度在5 s内升至峰值并逐渐减小,Y方向速度在1 s内急速增大并逐步反向,这是由于在机器人移动的激励下,柔性输电线质心位置在Y方向的波动。

图4 质心X、Y、Z方向速度
由图5质心加速度曲线可知,机器人在X方向加速度恒定为0,即加速度仅在YZ方向存在,5 s时,Y与Z方向的加速度均出现短时峰值,且Y方向峰值大于Z方向峰值。

图5 质心X、Y、Z方向加速度
仿真获得输电线档距中点在XYZ 3个方向的位移、速度、加速度,如图6~图8所示,机器人在线上行走起始,线路中点即存在位移。因机器人自身质量,导致输电线受力初始即产生位移,随着机器人继续行走,当接近线路中点时,中点位移比原始弧垂稍有增加,机器人继续行走,则后端曲线变化接近于起始点至中点之间参数变化的反向重复。由图6~图8可知,机器人行走过程中与输电线之间的相互作用力使输电线也开始运动。
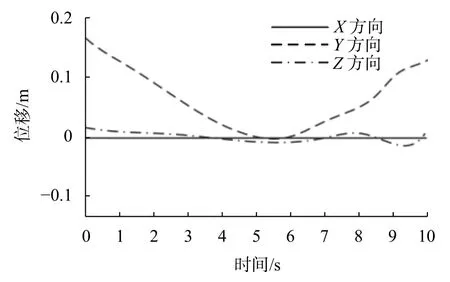
图6 输电线档距中点在XYZ方向的位移

图7 输电线档距中点在XYZ方向的速度
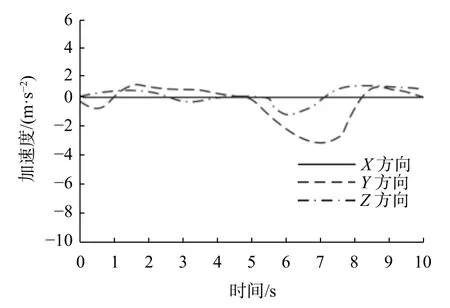
图8 输电线档距中点在XYZ方向的加速度
仿真获得机器人左右臂电机的输出力矩在10 s历时内的变化,如图9所示,左右臂电机的力矩趋势一致,均呈现阶跃性变化,并在线路相应的弧垂斜坡阶段出现了增长,以保证机器人顺利爬升。
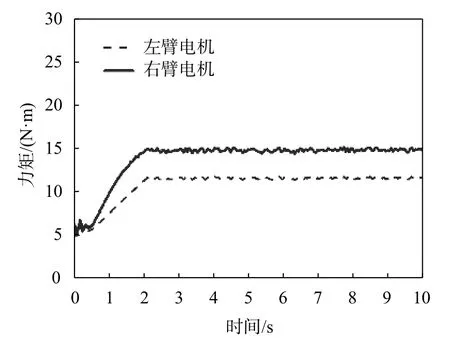
图9 机器人左右臂电机力矩
将数值模型与三维动力学耦合模型分别进行仿真,以机器人质心Z方向的位移在两种模型下进行仿真的曲线进行比对,两条曲线对应数值相减后所得差异值变化图10(a)所示,差异值与耦合模型仿真值的比值即差异率低于6.67%;以左臂电机在两种模型下进行仿真的输出力矩进行比对,两者差异值变化如图10(b)所示,差异率低于1.01%。

图10 两种模型仿真的差异值曲线
4 结束语
建立机器人、铁塔、输电线的三维模型,并导入ADAMS,同时设置运动副、约束、刚/柔体、接触等必要参数,仿真获得了机器人沿线路移动时,机器人质心以及输电线中点在XYZ各方向的位移、速度与加速度以及机器人左右臂电机力矩,并对曲线趋势进行了分析。仿真结果表明,输电线作为典型柔索,其柔性特征对巡线机器人的运动过程参数有较大的影响。后续在对机器人进行结构设计时,应充分考虑环境因素,通过对机器人结构参数的优化,对输电线对应点的位移、速度、加速度等运动变量幅值进行控制,获得最优的机器人设计方案。
