一种履带式除污机器人本体设计
2021-12-13彭小平
彭小平
(长沙航空职业技术学院,湖南长沙 410124)
除污机器人用于除污和搬运检查到的淤泥、垃圾等堆积物,其机器本体为搬运机器人,是一种可以进行自动化搬运作业的工业机器人,通过在机器人上安装不同的末端执行器,完成各种不同类型和状态的物体,将物体一个位置移到另一个位置,大大减轻了人类繁重的体力劳动。
现有的搬运机器人大多固定在台面上,只能对一定范围内的物品进行搬运,虽然目前有些机器人可以通过履带进行移动,但是运动平稳性较差,影响对物品的正常搬运,此外在运动过程中难免会撞击到障碍物,容易造成机器人部件受损。基于这类问题,针对现有的机器人本体予以研究改良,设计了一种工业履带式运输搬运机器作为除污机器人的本体,以达到解决问题与提高工作效率的目的。
1 机器人底盘设计
1.1 底盘的总体设计
机器本体的底盘总体设计如图1(a)所示,具体包括:1、基架2、驱动带轮3、驱动电机4、轮板5、支撑轮6、蓄电池7、防护板。防护板的一侧设置有与基架滑动连接的导柱,且导柱的外侧套接与防护板、基架相连接的弹簧,当基架撞击到障碍物时,防护板的导柱沿基架滑动并带动弹簧形变,可吸收冲击力,提高对机器人的防护效果。支撑轮至少设置有三处,且支撑轮通过轮轴与轮板相连接,在搬运物体时,可保证机器人在高负荷下平稳运动。蓄电池通过支架固定在基架1 上,且蓄电池通过电性方式与驱动电机、旋转电机、大臂电机、小臂电机、回转电机、腕部电机及电动夹爪相连接,蓄电池位于基架1 底部的中间,可降低机器人的重心,保证机器人平稳运行。
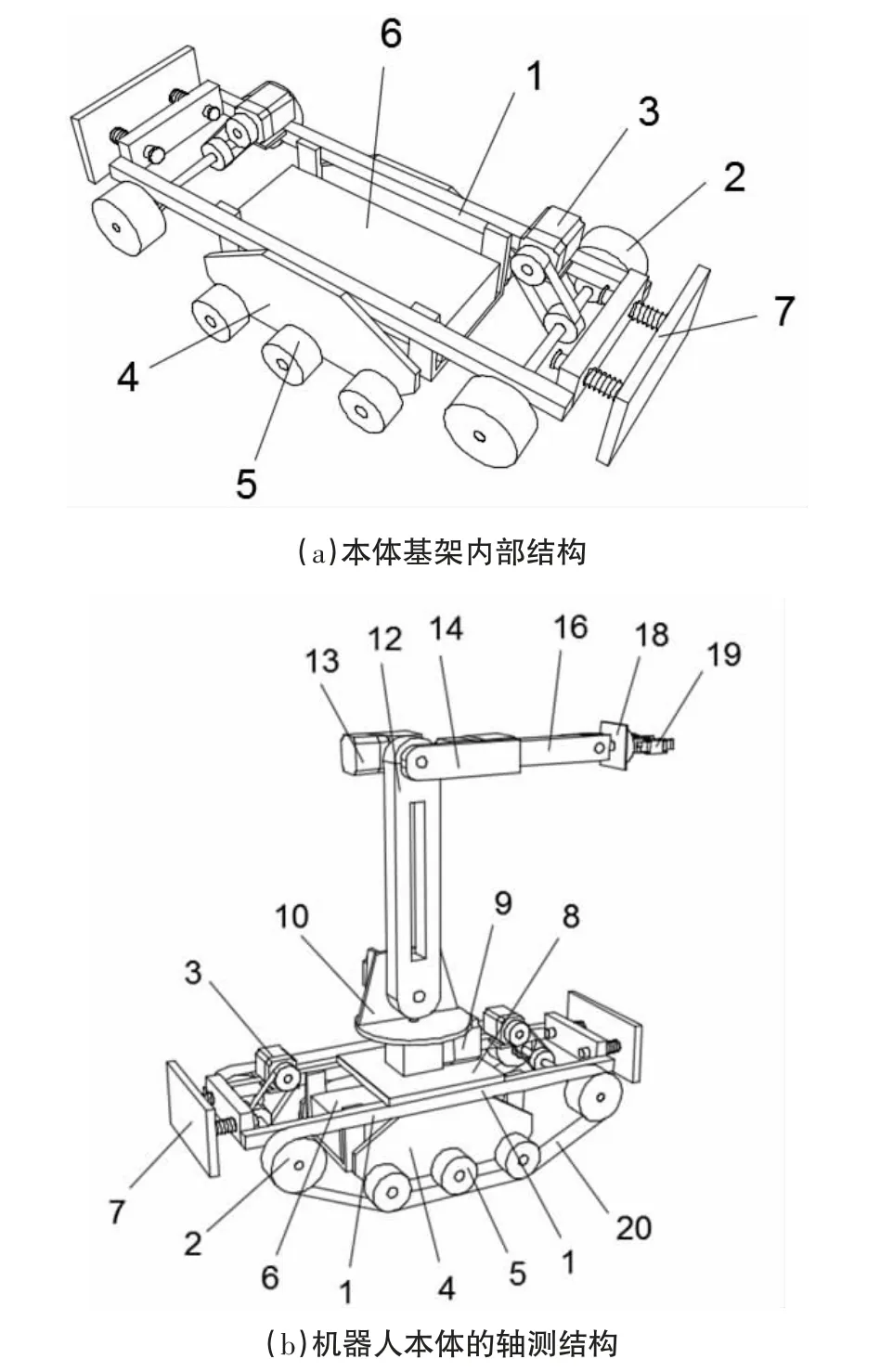
图1
1.2 除污机器人的履带式搬运主体结构设计
除污机器人的履带搬运式本体结构如图1(b)所示,除基架部分外,各个部分的具体名称为:8 支撑板、9 旋转电机、10 旋转基座、11 大臂电机、12 大臂、13 小臂电机、14 小臂、15 回转电机、16 回转臂、17 腕部电机、18 腕架、19 电动夹爪、20 履带。在该结构体的大臂两端设置有弧面,且大臂的中间开设有矩形通孔,可减轻机器人整体的重量。旋转基座的上方焊接有两处加强板,且加强板的外形呈直角梯形状,大臂电机位于两处加强板之间,使旋转基座结构稳固,提高承载能力。
在使用机器人时,旋转电机、大臂电机、小臂电机、回转电机及腕部电机可分别带动旋转基座、大臂、小臂、回转臂及腕架转动,可使电动夹爪在多个自由度上对物品灵活抓持,之后驱动电机可通过同步带及轮轴带动驱动带轮转动,使驱动带轮及支撑轮上的履带转动,实现对物品的转移,另外在机器人运动的过程中,基架底部的中间蓄电池在为机器人供电的同时,可降低机器人的重心,保证机器人平稳运行,当基架意外撞击到障碍物时,防护板的导柱沿基架滑动并带动弹簧形变,可吸收冲击力,提高对机器人的防护效果。
该工业履带式运输搬运机器本体结构,通过防护板的一侧设置有与基架滑动连接的导柱,导柱的外侧套接与防护板、基架相连接的弹簧的设置,当基架撞击到障碍物时,防护板发生伸缩可吸收冲击力,提高对机器人的防护效果;通过支撑轮至少设置有三处,且支撑轮通过轮轴与轮板相连接的设置,在搬运物品时,可保证机器人在高负荷下平稳运动;通过旋转基座的上方焊接有两处加强板,加强板的外形呈直角梯形状,大臂电机位于两处加强板之间的设置,使旋转基座结构稳固,提高基座的承载能力;通过对工业履带式运输搬运机器人的改进,使该接器本体结构具有合理性,运行平稳可靠,操作灵活,提高搬运效率,防撞性能良好的优点,从而有效的解决了一些工业履带式运输机器人所存在的问题和不足。
2 旋转基座电机控制系统总体设计
机器本体为达到机器人总体控制系统实现下水道通行和淤积物搬运的功能,需要实现摇杆控制加远程距离控制。因此机器本体设计的蓄电池输出端子有24 伏的直流输出和220 伏的交流输出。24 伏直流输出作为除污机器人的主要控制单元西门子S7-1200PLC 的工作电源,220 伏输出作为机械本体基座的驱动电机(伺服电机)的工作电源。基座设计为后轮两驱型。可以为除污机器人在下水道翻越障碍物和狭小管道中通过提供保障。既有足够的动力,又可以精确控制定位。本文所设计的底盘驱动电机由蓄电池输出24 伏直流给西门子S7-1200PLC 供电。由PLC 连接S120 驱动控制系统后可以控制伺服电动机在不损失扭矩和力矩的前提下进行精确的位置移动,同时这样设计可以帮助提高除污机器人在下水道中穿越障碍物的成功率,机器臂安装在下水道除污机器人的基座上。机器臂各关节步进电机同样由S7-1200PLC 控制。基座的驱动电机控制系统设计如图2所示。CPU 选择1215DC/DC/DC 的型号,这样可以由蓄电池提供24 伏的直流电源给PLC。电机型号选择AC220V/0.5KW 光轴不带键槽无抱闸的伺服电机,可以提供足够大的扭矩。驱动选择西门子S120 驱动系统CU320-2PN 型控制单元。同时专门配置16KW 的伺服电源模块,订货号为6SL3100-0BE21-6AB0。S120控制单元CF 卡选择双轴不带性能扩展固件V4.8,控制单元隔离片将CU320-2 控制单元的深度增加到270mm。在配置轴工艺时,模数使轴的位置置在一个区间内循环更新。本负载为一个旋转圆盘,位置值在0-360°之间循环,所以需选择“启动模数”。位置限制:本位置轴不设置硬限位开关,启用软限位开关作为保护即可,设置软限位开关下限为0°,下限位为360°。动态常规项:最大速度为2000r/min,加减速时间为1S。动态急停:急停的加减速时间为0.5S。另外需要设置回原点功能。
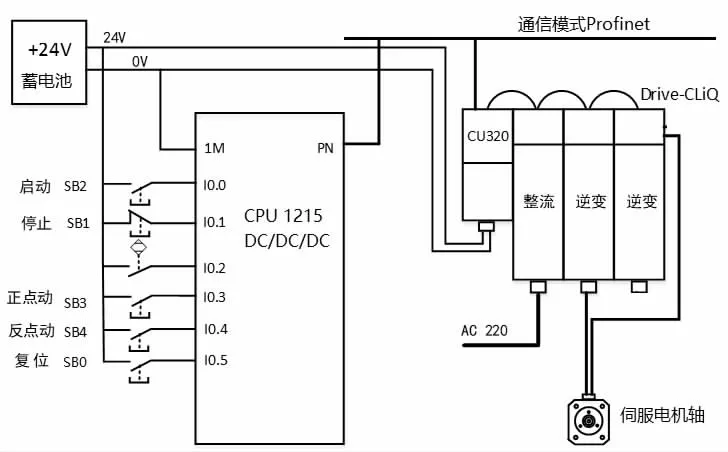
图2 旋转基座电机控制系统
3 旋转基座电机软件设计
旋转基座的电机由S7-1200PLC 控制,通信协议采用Profinet 协议。PLC 与驱动器之间以标准的PROFIdrive 报文进行通信。旋转基座电机在除污机器人工作时,需要控制其前进、后退、转向,能持续运行和电动运行。并且在判断出障碍物或者垃圾污物的位置后能够根据定位准确移动距离和方向控制。因此在设计程序时,需要设计电机的正向和反向控制以及电动控制。为保证移动的距离精确,每次启动电机时都需要执行回原点程序。在驱动电机完成回原点并输出反馈完成信号后再进行绝对位移指令的控制。执行回原点指令时,在正向寻找原点的过程中,如果不能找到原点位置,则执行反向寻找原点。具体在电机运行时,首先正向寻原点,其路径为:电机正向旋转→触发原点信号→转盘减速至反向旋转→触发原点信号→转盘正向加速至正向旋转→触发原点信号→转盘减速至反向旋转→触发原点信号→转盘停止寻原完成。按下启动按钮,发送信号给PLC 执行系统命令,此时指令运行:旋转轴上使能:使能=1;报警复位=2;下使能=0;正转运动指令:寻原点=1;相对位移=2;正转=30;反转=40;当PLC 反馈运行状态时:正转轴状态:使能=1;报警=2;指令执行情况:正转运动状态:回零命令确认=1,回零完成=11;相对位移命令确认=2,相对位移完成=12(单次运行60°);部分程序如图3 所示。其系统状态存储在DB45 和DB46 的数据块中。
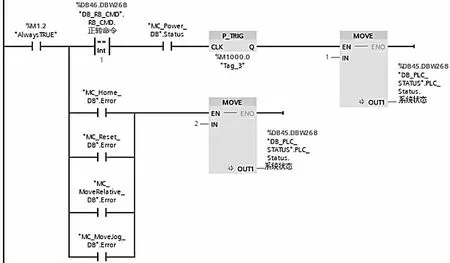
图3 旋转基座电机程序
4 结论
本文主要阐述了一种由西门子S7-1200PLC 控制的除污机器人本体设计及其驱动电机控制系统的设计。通过使用这种工业履带式的搬运机器结构作为除污机器人的本体,结合PLC 控制基座驱动电机,PLC 采用直流输入供电电源,本体部分设计了蓄电池结构可以持续稳定地为主体控制器提供电源,有效解决除污机器人的远程控制和作业低下问题,可以为除污过程提高效率,而且该结构主体的操作十分灵活,运行状态平稳可靠,防撞性能良好。
