基于驾驶模拟器的切入场景安全边界研究
2021-12-11刘金周石娟张嘉芮杨智博
刘金周,石娟,张嘉芮,杨智博
基于驾驶模拟器的切入场景安全边界研究
刘金周1,石娟2,张嘉芮2,杨智博3
(1.中国汽车技术研究中心有限公司,天津 300300;2.中汽研汽车检验中心(天津)有限公司,天津 300300;3.中汽认证中心有限公司,北京 100000)
为研究自动驾驶测试场景的安全边界,文章以前车低速切入场景为例,采用驾驶模拟器进行测试。设置不同的本车速度、目标车速度和目标车的切入时刻。对驾驶员的碰撞结果用无碰撞风险、临近碰撞、发生碰撞三种结果来表示。本车速度选取80 km/h、100 km/h、120 km/h三个速度点,目标交通车以设定的TTC在前方切入本车车道,TTC取值从0.8 s~3.5 s不等。测试选取10名驾驶员。对不同驾驶员的测试结果进行分析,结果表明相同本车速度下,所需安全间距与切入距离正相关并给出了具体的临界安全值,本研究可为自动驾驶功能开发和测试评价指标的制定提供参考。
驾驶模拟器;驾驶行为;前车低速切入场景;安全边界
引言
随着自动驾驶技术的发展,自动驾驶功能逐步从AEB、FCW、ACC等L1、L2系统发展到高速道路上的L3、固定线路下的L4系统。安全性问题一直是不同等级自动驾驶最重要也是最受关注的问题。自动驾驶功能安全性评价主要是基于场景进行的,即根据不同自动驾驶功能的ODD(Opera- tional Design Domain,设计运行范围)梳理出需要测试的场景列表后,再针对每种场景进行评价。而目前在每种场景的安全性指标、场景设计边界等方面还没有比较统一的标准。联合国车辆法规协调论坛“自动驾驶与网联汽车工作组”下设有“自动驾驶测试评估方法非正式工作组”,该工作组在驾驶行为方面开展重点研究。其研究思路如下:首先提出自然驾驶常见场景,之后针对单个场景进行驾驶行为分析,最终得出的研究结果可为自动驾驶功能的安全性测试规程制定提供指标,同时能够为自动驾驶控制策略的设计提供参考。
自动驾驶汽车行驶环境复杂多变,传统的安全性测试评价方法已经不能满足其需求,需要基于场景进行多角度、全方面的测试评价[1],国内外学者的研究重点也逐渐从技术突破转移到功能测评,特别是安全性评价。夏芹等[2]将自动驾驶的静态环境因素和动态交通场景进行层次分析,获得自动驾驶的某个组合危险场景的复杂度,缩短实际道路所需的安全评价测试里程。韩大双等[3]对大量事故数据进行宏观统计,提取典型事故场景并建立自动驾驶特定场景下的安全评价模型。考虑到实车测试难以支持危险工况下实验的局限性,以实际道路数据作为分析依据,利用虚拟仿真等手段开展安全测试成为一种有效的评价手段。多个国家和组织都建立了交通事故数据库,包括美国的国家机动车事故抽样系统数据库[4]、日本的交通事故微观调查数据库[5]、欧盟道路安全实验室的深度死亡事故数据库和深度事故成因数据库[6]、中国的国家车辆事故深度调查数据库[7]以及德国公路研究中心建立的国际道路交通与事故数据库[8]等。Zhao等[9]基于自然驾驶数据,分析了交通参与者的危险变道与切入驾驶行为,将危险行为特征频次引入虚拟仿真环境中来实现自动驾驶汽车的加速测试。
欧洲“自动驾驶测试评估方法非正式工作组”下设的场景研究小组,提出对场景按照感知、决策和执行等过程展开驾驶行为建模。本文依托驾驶模拟器,对不同本车速度、不同目标车速和不同切入时刻下驾驶员能否避免碰撞来找出前车切入场景的安全边界限值。
1 测试设备及测试方法
1.1 测试人员
共有12名驾驶员参与测试。其中2名驾驶员由于对设备不适应,出现眩晕(simulator sickness)的情况,测试数据存在极大的偏差而排除。有效数据包括10名(2名女性)驾驶人参与测试,年龄为23~34岁,平均年龄29岁,平均驾龄为3.5年。在实验前告知测试过程中的注意事项,并让其按照日常驾驶习惯自由驾驶,正式测试之前,用相同场景对所有驾驶员进行适应性训练。
1.2 驾驶模拟器测试平台
目前技术比较先进的国外主机厂,如奔驰、宝马、沃尔沃等都将多自由度驾驶模拟器应用到了产品的开发过程中。国内车企如蔚来汽车也建立了动态驾驶模拟器。目前,主机厂的传统应用方向主要在动力学模型、轮胎模型、转向模型和制动模型的调试等方面。随着自动驾驶技术的发展,驾驶模拟器越来越多的向人因方向的研究发展,如人机交互、驾驶行为研究、人机工程研究等方向。
作为自动驾驶领域补充实际道路测试的一种重要工具,驾驶模拟器在驾驶员特性、人机交互以及高危风险场景的研究中具有显著优势。爱荷华大学[10]使用2003年研发的NADS-I驾驶模拟器进行人机交互、碰撞事故的人为因素的研究。丰田公司[11]使用2008年研发的驾驶模拟器进行汽车主动安全技术、驾驶员行为模式的研究。同济大学[12]使用驾驶模拟器开展驾驶员行为模式、车辆安全技术、道路交通设计等领域的研究。杨柳[13]利用驾驶模拟器进行驾驶员行为预测研究。周兵[14]利用驾驶模拟器采集城市十字路口工况下的驾驶员数据。驾驶模拟技术已经在汽车智能技术研发中日益受到重视。
常见的驾驶模拟器主要分两种,一种是静态驾驶模拟器,一种是动态驾驶模拟器。静态驾驶模拟器一般是指没有自由度的驾驶模拟器,即在车辆运行过程中没有横向、纵向和垂向等方向的运动。动态驾驶模拟器一般由实时计算系统、运动平台、视景模拟及显示系统及声音模拟系统等组成。其特点是可以将真实驾驶员放置于测试环路中,并通过运动平台将驾驶员在开车过程中的横向、纵向和垂向的位移和旋转、配合同步的视景画面,反馈给驾驶员。因此可以基于此开展驾驶行为的测试和研究,特别是危险场景、超速场景等实际道路测试比较难采集到的场景。
本文采用的驾驶模拟器是动态驾驶模拟器,视景逼真效果好,运动平台响应快。测试设备图如下图1所示,交通流的轨迹采用Carmaker软件搭建,视景渲染采用rFpro软件。

图1 动态驾驶模拟器全景图
1.3 测试用例设计
本次研究的场景聚焦于前车切入,调节参数为本车速度、前车速度与切入距离。驾驶员以不同本车速度驾驶车辆时,目标车以不同速度和切入距离切入,测试驾驶员能否避免碰撞的发生。设计测试用例如下表1。其中速度差指本车速度与前车速度之差。其中是指本车和目标车以现有速度行驶的情况下,距离碰撞发生的时间,其计算如式(1):
注:指两车距离,ego为本车纵向速度,cut为切入车辆速度纵向速度。
表1 测试用例设计表
本车速度/(km/h)相对速度/(km/h)切入距离设计参考TTC值/s 80100.8,1,1.5,2 20 30 40 100100.8,1,1.5,2 20 300.8,1,1.5,2,2.5,3,3.5 40 50 120100.8,1,1.5,2 20 30 400.8,1,1.5,2,2.5,3,3.5 50 60
1.4 试验过程
测试人员到达试验室后,首先对驾驶模拟器进行基本情况的了解,包括驾驶模拟器测试的基本原理、操作方法及危险状况下的急停操作等。操作人员对试验内容、试验目的展开宣贯。在对设备和试验流程熟悉后,测试人员进入模拟器驾驶舱进行试验。
为了保证试验数据的准确性,被试者首先自由驾驶20分钟,之后在直线道路上自由行驶以此来对环境适应性训练,在驾驶员完全熟悉测试环境和设备操作之后再进行具体项目的测试。
现场测试情况如图2,为了保证测试结果的真实性,每条测试用例中放置多辆背景车辆,采用背景车辆与目标车辆混合的方式。背景车辆保持在既定车道稳定行驶,目标车辆以设定的速度和距离定参数切入,以模拟前车切入场景,驾驶员对相邻车辆是否会切入没有预判,目标车辆随机切入到本车道。以此来保证驾驶员有较真实的驾驶行为特征。驾驶员按照规定速度行驶,当发现前方有相邻车辆变道到本车道时,驾驶员通过刹车或转向来避免碰撞的发生。最终通过监控两车横纵向距离以及现场画面回放,来判断是否发生碰撞。
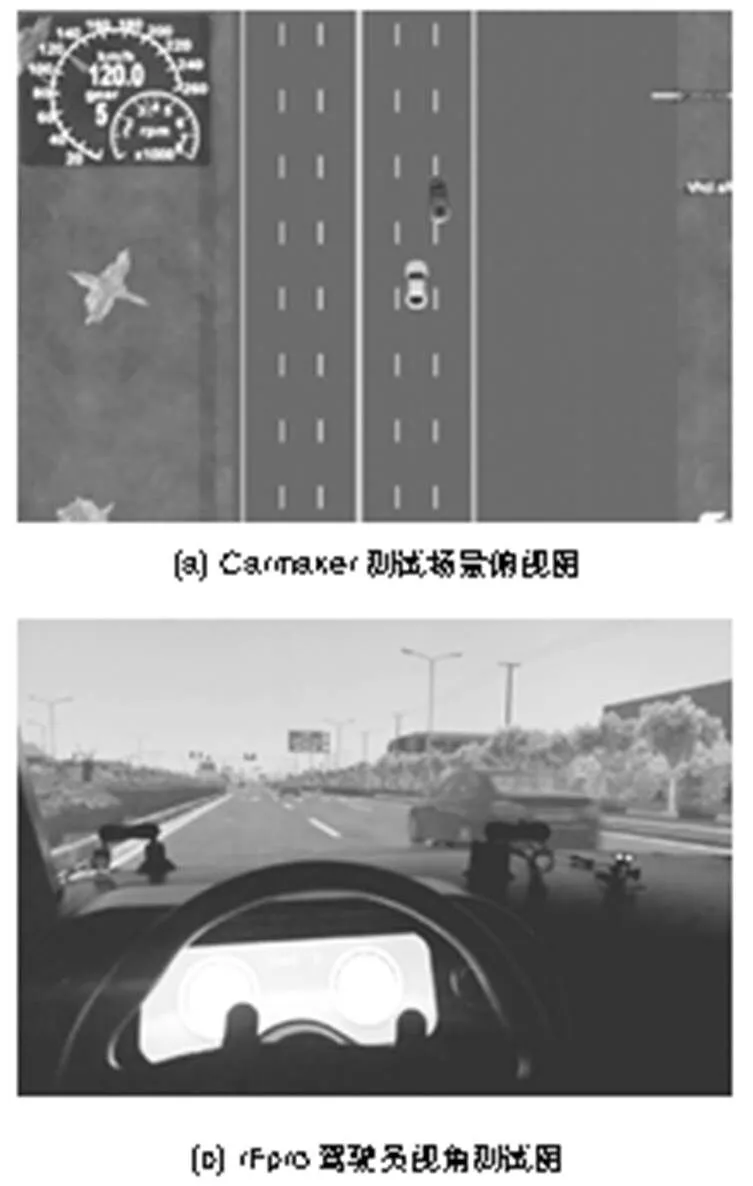
图2 切入场景测试示意图
1.5 数据采集
试验过程中记录本车速度、交通车速度以及两车距离分析在前车切入场景中,两车的速度差、切入距离等因素对碰撞的影响。在分析过程中从3个等级来描述驾驶员发生碰撞的情况,包括发生碰撞、临近碰撞和完全避免碰撞,其定义如下表2。
表2 不同碰撞等级赋值及含义
等级赋值含义 避免碰撞0前车切入后,本车与前车最近距离在1m以上 临近碰撞1前车切入后,本车与前车最近距离在0~1m之间 碰撞2前车切入后,本车与前车最近距离为0m
2 测试结果
驾驶模拟器具有可重复性高、可模拟危险场景、具有极高的安全性和复现度等特性,对于进行危险场景研究弥补实际道路测试的不足具有重要意义,本文利用驾驶模拟器对前车切入场景进行详细驾驶行为分析。下面分别将速度差和本车速度设置为控制变量,分析碰撞风险变化。将10名驾驶员测试结果进行统计,并将测试结果求平均值,针对不同本车速度绘制如图3到图5所示。从图中可得,在前车切入场景中,在本车相同速度下所需的安全距离与速度差正相关,同时可从图中得到不同速度差下发生临界碰撞的距离。
图3是在本车速度80 km/h时,不同速度差下,前车切入距离与碰撞风险的关系图。从图中可得当前车以为0.8 s对应的切入距离下实施切入,本车基本上均不能避免碰撞,而在为2 s对应的切入距离下,均能避免碰撞的发生。本车与前车速度差为10 km/h、20 km/h、30 km/h、40 km/h对应的临界安全切入距离分别为3.6 m、7.7 m、12.5 m、16.6 m。
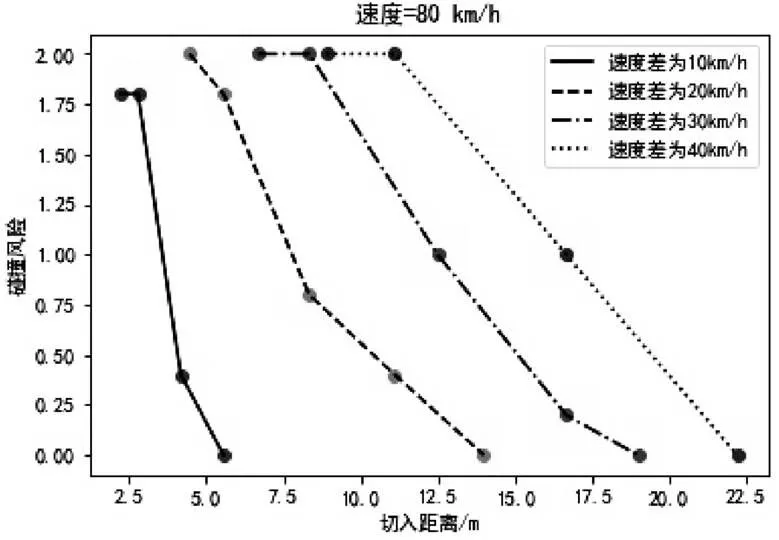
图3 本车车速80 km/h,碰撞风险图
图4、图5为100 km/h、120 km/h时,不同速度差下,切入距离与碰撞风险的关系图。由于速度差较大的情况下,需要更大的安全间距,因此在速度差较大时切入距离按照为0.8 s、1 s、1.5 s、2 s、2.5 s、3 s、3.5 s计算。表3给出本车速度为80 km/h、100 km/h和120 km/h是对应的临界安全切入距离。
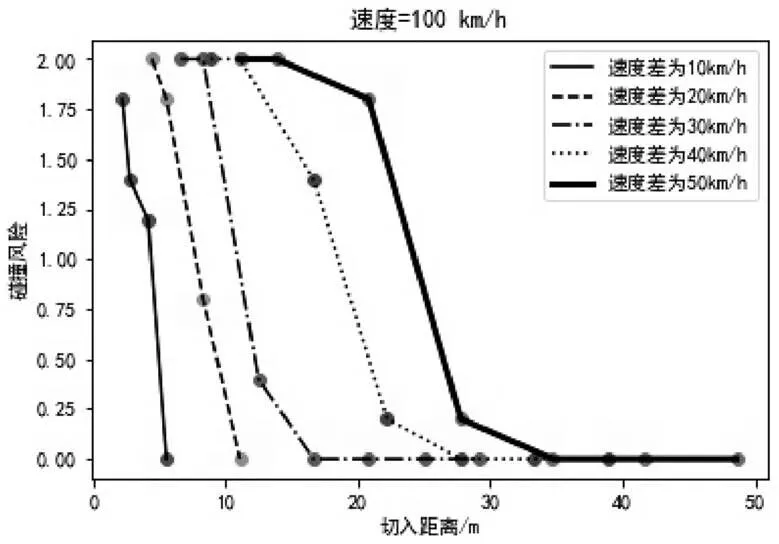
图4 本车车速100 km/h,碰撞风险图
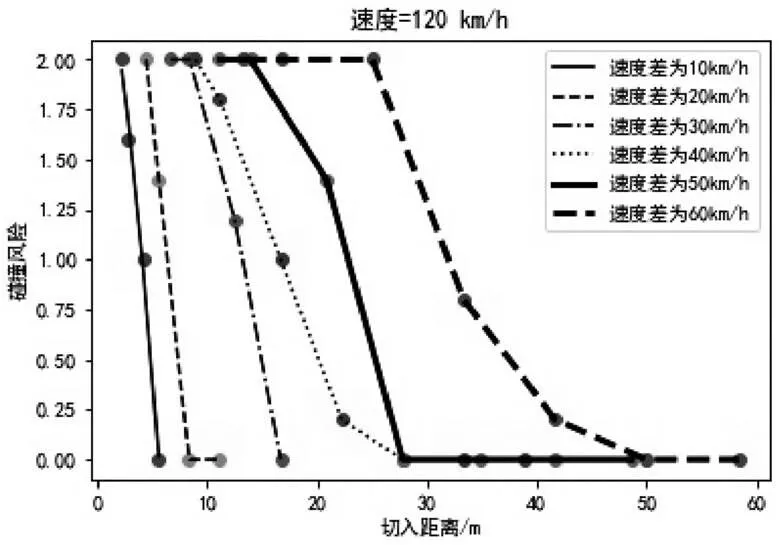
图5 本车车速120 km/h,碰撞风险图
3 总结
本文基于驾驶模拟器对前车低速切入场景开展研究,分析在不同的车速、前后车速度差以及不同切入距离下,驾驶员能否避免碰撞的发生。本次实验人员共10人,遵循随机切入、混合交通、接近自然驾驶的原则进行场景设置以保证实验结果的可信度。从3个等级来描述驾驶员发生碰撞的情况,包括发生碰撞、临近碰撞和完全避免碰撞并进行赋值量化,之后将10名测试人员的结果求平均值,进而得到自动驾驶测试场景的安全边界。设置80 km/h、100 km/h、120 km/h三种高速车速,本车与目标车的速度差根据实际情况发生的可能性,设计不同速度差,包括10 km/h、20 km/h、30 km/h、40 km/h、50 km/h、60 km/h等,并根据本车速度和相关速度的大小设置了0.8 s、1 s、1.5 s、2 s、2.5 s、3 s以及3.5 s七种不同的对应的切入距离。
表3 不同本车速度和相对速度下的临界安全切入间距
本车速度/(km/h)相对速度/(km/h)临界安全切入距离/m 80103.6 207.7 3012.5 4016.6 100104.5 207.8 3010.9 4019.5 5024.3 120104 206.2 3013.2 4016.7 5022.7 6031.8
研究发现,一定速度下,所需安全切入距离(即对应的)与相对速度正相关,这与驾驶员的制动距离、转向所需时间、驾驶员反应时间等相关。之后给出了不同相对速度下对应的临界安全切入距离,可为自动驾驶控制算法的开发和测试评价规程的制定提供参考。本文基于驾驶模拟器对切入场景的研究方法同样适用于其他测试场景。
[1] 朱冰,张培兴,赵健,等.基于场景的自动驾驶汽车虚拟测试研究进展[J].中国公路学报,2019,32(6):1-19.
[2] 夏芹,陈涛,李艺,等.自动驾驶车辆安全性测试评价方法[C]//中国汽车工程学会, 2016.
[3] 韩大双,马志雄,朱西产,等.用于自动驾驶汽车的汽车-骑车人事故场景分析[J].汽车安全与节能学报,2020,11(2): 220-226.
[4] SCANLON J M, SHERONYT R, GABLER H C. Earliest sensor detection opportunity for left turn across path opposite direction crashes[J].IEEE Transactions on Intelligent Vehicles,2017,2(1): 62- 70.
[5] HITOSUGI M,TOKUDOME S,Injury severity of occupants in lateral collisions in standard and small vehicles:analysis of ITARDA’s in-depth investigation data[J].International Journal of Crashworthin- ess,2011,16(6):657-663.
[6] VIVO G,DALMASSO P,VERNACCHIA F.The European integrated project SAFESPOT——how ADAS applications co-operate for the driving safety[C]//IEEE.2007 IEEE Intelligent Transportation Syste- ms Conference.New York:IEEE,2007:624-629.
[7] 曹毅,周华,肖凌云,等.基于NAIS数据库中视频信息的人-车碰撞事故特征分析[J].汽车安全与节能学报,2020,11(1):44-52.
[8] International Transport Forum. Road Safety Annual Report 2018[R]. Pairs: OECD Publishing,2018.
[9] ZHAO D,LAM H,PENG H,ET AL.Accelerated evaluation of auto- mated vehicles safety in lane-change scenarios based on importance sampling techniques[J].IEEE Transactions on Intelligent Transpor- tation Systems,2017,18(3):595-607.
[10] UTC.National Advanced Driving Simulator Measures Driver Interactions with Automated Driving System[A/OL]. (2017-05-31) [2020-0630].
[11] 田顺,谷亚蒙,魏朗,等.驾驶模拟器的发展历程及最新应用实例[J].汽车技术,2018 (4):35-42.
[12] 陈丰,彭浩荣,马小翔,等.侧风作用下货车驾驶员反应行为模型[J].同济大学学报(自然科学版),2020,48(5):702-709.
[13] 杨柳.基于脑电数据分析的驾驶行为研究[D].北京:北京交通大学,2019.
[14] 周兵,潘倩兮,付沛沛.基于BP 神经网络的十字路口拟人化驾驶决策模型[C]//第十六届国际汽车交通安全学术会议.长沙: INF- ATS,2019:189-196.
Safety Boundary Study of Cut-in Scenario Based on Driving Simulator
LIU Jinzhou1, SHI Juan2, ZHANG Jiarui2, YANG Zhibo3
( 1.China Automotive Technology and Research Center Co., Ltd., Tianjin 300300; 2.CATARC Automotive Test Center(Tianjin) Co., Ltd., 300300; 3.China Certification Center for Automotive Products Co., Ltd., Beijing 100000 )
In order to study the safety boundary of the automatic driving test scenario, this paper takes the cut-in scenario as an example and uses the driving simulator to conduct the test. Set different vehicle speed, target vehicle speed and target vehicle cut-in timing. The collision results for the driver are represented by three kinds of results: no collision risk, near collision and occurrence collision. The speed of the vehicle is selected at three speed points: 80 km/h, 100 km/h and 120 km/h. The target vehicle cut into the ego vehicle lane ahead according to the set TTC, with TTC value ranging from 0.8s to 3.5s. Ten drivers were selected for the test. The test results of different drivers are analyzed, and the results show that at the same vehicle speed, the required safe distance is positively correlated with the cut distance, and the specific critical safety value is given. This study can provide a reference for the development of autonomous driving functions and the formulation of test and evaluation indexes.
Driving simulator;Driving behavior;Cut-in scenario; Safety boundary
A
1671-7988(2021)22-12-05
U495
A
1671-7988(2021)22-12-05
CLC NO.: U495
刘金周(1988—),男,研究生,工程师,就职于中国汽车技术研究中心有限公司,研究方向:智能网联汽车政策研究。
省级项目:智能网联汽车关键测试评价技术研究(编号:20YDLYGX00180)。
10.16638/j.cnki.1671-7988.2021.022.004