基于多旋翼无人机防坠机装置的研究
2021-12-10黄兴赖照明陈国平琚成炎李龙生
黄兴,赖照明,陈国平,琚成炎,李龙生
(广州供电局,广东 广州 510310)
在电力行业的架空线路运维工作中,无人机巡检已成为必不可少的运维工具,在日常的巡视、线路验收、故障排查、检测中广泛使用。由于线路巡检工况复杂,对无人机操作人员要求非常高,而且随着无人机的功能逐渐完善,除本身耗费较大之外,所携带的电子设备也越来越尖端、精密,且造价昂贵,所以无人机的使用安全问题显得尤为重要。
本文通过研究多旋翼无人机的防坠机装置,有效克服炸机问题,为作业人员减少心理负担,提高作业的成功率,为巡检人员提供安全、可靠、便捷的巡检作业,能够极大地避免因错误操作带来的巨大社会经济损失。此外,本装置可形成具有自主知识产权的新产品,弥补我国在无人机坠机防护领域的技术空白。
1 无人机坠机的因素
在无人机的日常巡检中,有时会发生无人机坠毁事件,炸机一般由以下原因造成:
(1)运维人员操作失误。对于线路运维,高压线高压塔一般都建造在山区,飞行环境比较复杂,运维飞行人员需要承受很大的工作压力,特别是在高强度的飞行作业中,运维人员更容易飞行操作失误,从而导致无人机坠机;
(2)电池掉电。高强度的运维工作往往会致使无人机电量大幅度衰减,即电池电量为虚电。由于掉电很快,按照遥控器APP上显示的电量来规划返航往往来不及,这时也常导致炸机;
(3)突现障碍。无人机在高压线飞行开展作业时,偶尔会有许多鸟在附近飞行活动,如果这时候无法准确预判小鸟的飞行轨迹,操控无人机避开小鸟,也将会导致炸机事件的发生;
(4)强风大雨。在远距离巡检时,突降大雨,导致无人机无法及时返航,也将容易导致炸机。
无人机炸机不仅是设备损失,还可能造成其他次生事件,造成更大不可知的损失。因此,无人机的使用安全问题尤为重要,有必要对无人机坠机前进行保护,确保不出现炸机情况。
2 总体技术方案
2.1 无人机降落伞设计
通常按时序将降落伞的工作过程划分为三个阶段,即拉直过程、充气过程和稳定下降过程。在拉直过程中,处于紧捆扎状态的伞绳和伞衣从伞仓里迅速拉出;充气阶段是指从伞衣系统全长拉直起到伞衣第一次充满为止的整个过程;在伞衣完全充满后,启动阻力将物-伞系统继续减速直至到达稳定的平衡状态,这一过程为稳定下降阶段[2]。伞衣充满条件如下:
为了使降落伞能够顺利的充气并充满,物-伞系统在开伞时的速度要求足够大,满足开伞所需动压。但是降落伞充满所需的速度有一定的范围限制,即伞衣充满条件。通过推导可以得到降落伞是否能充满的判据:
(1)若Vmin<V<Vlk,则伞衣立即充满;
(2)若4Vd<Vlk<V,则伞衣经历过一段时间后充满;
(3)若Vlk<4Vd<V,则伞衣不能充满。
其中,Vmin为最小开伞速度,Vlk为临界开伞速度,Vd为伞衣充满后系统稳定下来的速度,V为伞衣充气时系统的速度,降落伞为弹射开伞,重量可缩小50g以内。
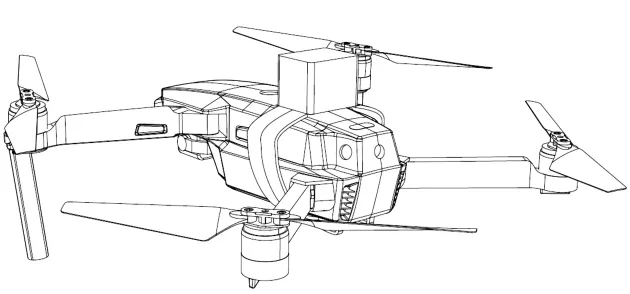
图1 无人机降落伞包示意图
2.2 无人机保护罩结构设计
近年来,小型无人机在航拍、测绘、农业植保、线路巡查、电力巡检等领域得到了广泛应用。多旋翼无人机失控掉落时,其状态是无法确定的,机械机构对无人机全方位保卫可以大大降低无人机因小碰撞而导致的失控问题[3]。如图2所示用保护罩对无人机各个方位都进行了保护,最大地保障了无人机因操作失误对物体进行小剐蹭而导致的炸机,桨叶停转时,也能在无人机坠落前提供一定的缓冲,极大减少无人机的损坏。但飞行挂载较多,可能会小幅度地影响无人机的续航时间,续航时间会因此而减少。
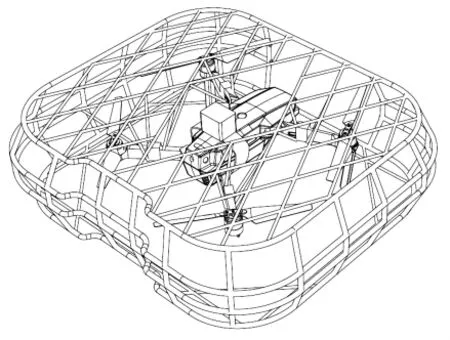
图2 无人机降落伞包加保护罩示意图
2.3 通过2.4g控制降落伞包打开
2.4g无线技术是一种无线传输技术,其将频段设置在2.405GHz与2.485GHz之间,而且这一频段在很多国家都是免费的,因此其使用价值及前景非常广泛。无线数据传输的实现是通过RFW102无线芯片模组来完成的,所需频段为2.4GHz的ISM频段,适合电压在2.7V-3.6V之间,对任何电源都适用,速率可达到1Mbps,有效传输距离为2千米,降落伞模块可通过手动控制打开降落伞,无人机在失控后,可迅速按打开键,降落伞包可完成打开动作。降落伞顺利打开后可大大降低坠机的损坏程度。
2.4 人工智能算法高速判断
基于人工智能算法技术,以及结合多年研究无人机的丰富应用经验,针对无人机防坠机应用领域自主研发一种防坠机安全算法,无人机防坠机装置通过搭载防坠机安全算法和高性能芯片,可对无人机进行每秒50次的状态判断,每秒325次的姿态数据分析,每秒6000次危险检测,通过对状态判断数据、姿态数据、危险检测数据等与坠机相关的多维度核心数据综合分析判断,构建一个立体化的防坠机判断模型,在通道巡视或者精细化巡视的作业中,无人机一旦发生坠机,瞬间判断,响应速度只有10毫秒,开伞反应时间仅为140毫秒。
2.5 海拔与姿态传感器双冗余检测
如果无人机在巡检作业中一旦发生坠机,那么在坠机的过程中,无人机海拔高度和姿态数据对于防坠机安全算法做出是否开伞的判断而言,是十分重要的。因此,无人机防坠机装置将配备高性能的无人机海拔和姿态传感器,高性能传感器能够每秒采集无人机所处海拔高度、螺旋桨转速、空间方位姿态、各方向速度、空间重力情况等多维度的数据,并实时更新,提供全面、及时、可靠的全方位数据,帮助防坠机安全算法在无人机坠机之时做出最为正确的判断[4]。而且海拔与姿态传感器采用双冗余设计,提升无人机坠机装置的可靠性。一旦其中一套传感器发生故障时,无人机防坠机装置将自动切换至备用传感器采集数据,为防坠机安全算法提供所需数据。
2.6 采用大面积伞布减小缓冲距离
降落伞的基本原理就是利用空气阻力减小下降速度。简单地说就是用比较大的伞面增加自由落体下降时的阻力,减小下降时的速度,使无人机能够承受自身下降的速度和由于自身重量产生的动量,避免由于速度过高摔坏,甚至危机周边物品及人员安全。降落伞的下落速度和空气密度、伞的形状特性、载重量等因素有关,总体上可以用降落伞拉力方程来表述:

其中,FD为拉力,ρ为空气密度=1.22kg/m3,Cd为风阻系数,A为降落伞面积,v为空气的相对速度。
当载重的重力与降落伞拉力相等时,降落伞匀速下降,即有:


其中,FG为重力,m为载重质量,g为重力加速度=9.81m /s2。
降落伞面积:

又因为:

由式(4)和式(5)得出降落伞直径:

基于以上降落伞拉力方程和电力行业常见的无人机负载重量综合计算的结果,为最大化适应电力行业的应用,无人机防坠机装置将采用0.5m2的大面积伞布,以及结合布料特殊涂层,降低伞布质量,提高布料密闭性,减缓下降速度,使得缓冲距离大大减小。
2.7 47g极致超轻和流体外观设计
在电力行业的通道巡检和精细化巡检作业中,无人机需要搭载相机,无人机在无挂载的情况下,续航时间一般在30-60分钟之内,而搭载了相机或其他挂载的话,续航时间将进一步缩短。为了最大化减少对原本作业时长的影响,保障原本的作业效率不变,无人机防坠机装置将会把重量做到低至47g,将其安装在无人机上,就相当于一个成年人手上拿着两个鸡蛋的重量,几乎可以忽略不计。
另外,无人机防坠机装置在外形设计方面将采用流体外观设计,有效降低风阻,减少作业时安装装置带来的额外续航损失,高效贴合无人机背部,平稳飞行,不影响下置负载的任何功能。
2.8 强劲续航与防尘防水
无人机防坠机装置将配备新一代节能芯片,待机功耗将降至6.8微安,80天超长待机,连续启用时续航时间长达25小时,可供满电无人机循环多次,不但如此,还将为无人机防坠机装置配备自动休眠、低电量预警反馈功能。30分钟快速充电,大容量锂电池理论充放电500次以上。
IP54防尘防水,在巡检过程中,如果遇到下雨,也无需担心无人机防坠机装置被淋坏,而且底部采用硅胶材质,具有防滑稳定的性能,最大化克服雨天带来的影响。
3 结论
本文研究了无人机的防坠机装置,包括对无人机可控降落伞包和保护罩的设计。可控降落伞包可降低无人机坠落损坏率,在无人机飞行时,遇到认为操作失误及不可避免的外接因素导致坠机时,最大幅度减少无人机的损坏,保障无人机的安全作业,以及无人机万一炸机损坏的维修成本,并大大排除无人机砸到人导致的人员伤亡事故,提高运维人员和作业的安全性;而保护罩可降低无人机的坠机率,使人为操作失误导致坠机的概率大大降低,可避免小剐蹭无人机炸机,碰撞后即可反弹,与传统无人机碰撞后易导致坠毁相比,添加无人机保护罩大大增加了其安全性。
