CT图像局域阴影特征小波阈值提取方法
2021-12-10衣秀清
衣秀清,刘 静
(山东中医药大学智能与信息工程学院,山东济南 250355)
1 引言
医院诊治过程中离不开X光和CT等影像诊断的辅助,因此其有着举足轻重的作用[1],但目前大部分医院可接纳的患者数量已经到了饱和状态,所以继续使用以往的影像处理办法已经无法满足现在的需求,如何最大程度减少人力物力又能提高影像诊断已经成为医疗建设中的一大重点问题[2],其中提取CT图像局域阴影特征就是解决这一问题的办法之一[3]。刘晓虹[4]等人提出基于多尺度LBP算法的CT图像局域阴影特征提取方法,该方法简单预处理CT图像后从中选取出异常图像,并利用多尺度LBP算法提取出CT图像的局域阴影特征,融合相邻区域的相关信息,以此减少信息量,该方法虽对CT图像进行预处理,但处理过程中没有利用灰度变换中和CT图像曝光过度或曝光不足,导致图像对比度和峰值信噪比较低,从而影响视觉效果。易鑫[5]等人提出纸基纳米金阵列CT图像局域阴影特征提取方法,该方法在纸基纳米金阵列的基础上将CT图像进行一个粗略的分割,使其成为形态学网格,并利用图像的色调和亮度结合SRG算法,有效地提取CT图像局域阴影特征,并利用邻接特性实现CT图像局域阴影特征提取,该方法在提取过程中没有利用小波阈值的方法对CT图像进行去噪,导致影响CT图像像素的因素过多,无法清晰地辨别CT图像的局域阴影特征,以此降低了ROC曲线。孟勃[6]等人提出基于四元数Gabor滤波的CT图像局域阴影特征提取方法,该方法中和Gabor以及四元数Gabor滤波,利用四元数矩阵描述出CT图像,并运用四元数Gabor滤波卷积算法获取多尺度的CT局域阴影特征图像,最后利用Tamura统计特征的提取方法实现CT图像局域阴影特征提取,该方法最终提取CT图像局域阴影特征前没有增强CT图像,导致在旋转图像时像素会下降,还会出现冗余数据,降低了提取CT图像局域阴影特征的速率,进而降低了特征分离度。为了解决上述方法中存在的问题,提出CT图像局域阴影特征小波阈值提取方法。
2 CT图像的预处理
患者在拍摄CT影像过程中存在的各种干扰因素,会导致图像不清晰,因此需要对影像进行去噪等预处理[7]。
2.1 双树复小波阈值去噪
小波阈值在图像的去噪过程中有着举足轻重的作用[8],阈值在选取过程中不能过大也不能过小,阈值太小去噪效果较差,太大又会过度去噪,去噪主要利用硬阈值和软阈值,硬阈值λHard即只留下小波系数幅值大于阈值的值,其余小波系数定义为0,其函数公式为
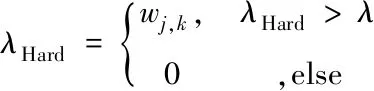
(1)
式中,wj,k代表小波系数,λ代表阈值。
软阈值分三种情况,分别是小波系数大于阈值λ、等于阈值λ和小于阈值λ,这三种情况求解小波系数的方法分别为与阈值λ相减、直接定义为0和与阈值λ相加,由此得到软阈值λSoft的函数公式为

(2)
由于硬阈值的去噪过程中可能出现振荡,软阈值的去噪效果可能出现偏差,因此针对这两个缺点,提出结合两种去噪方法的优点重构去噪方法,重构后的阈值表达式为
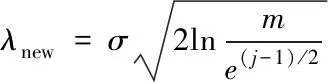
(3)
式中,j代表分解尺度,m代表图像中信号的大小,σ代表图像噪声的标准方差。式(3)中的j与λnew成反比,即当j减少则阈值T增加,否则反之,由此可得到优化后的小波系数公式为

(4)

由于优化后的阈值结合了软阈值和硬阈值的优点,因此阈值存在于两种阈值的中间,则s型函数的表达式为
f(x)=d/(1+e1/[(b-x)(a-x)]×{-[(b+a)/2-x]})
(5)

确定小波去噪的关键阈值后即可进行去噪,其去噪过程为:
第一步:在双层复小波函数的基础上将CT图像分解成J层,同时求解小波系数。假设CT图像中带有噪声的信号为X,令其长度为l=2J,则运用正交小波转换算法运算得到低分辨率尺度系数为vα,k,其中α为低分辨率,且J>α≥0。
第二步:s型函数公式中的参数b属于区间(λnew,2λnew),a属于区间(0,λnew),则在两个参数中任取一组参数(ai,j,bi,j),其中i等于所有正整数,由以上可总结出df(x)/dx|x=λnew=1,在满足此表达式的基础上在参数(ai,j,bi,j)中选出一个di,j。
第三步:根据(ai,j,bi,j,di,j)求解出s型函数公式,并对经过分解的高频子代系数实施阈值值操作,获取出全新的单元阵列,并在阵列中找出相对应的数值,并保留此数值。
第四步:重复第二步和第三步,最终获取出一个经过阈值值操作的单元阵列。
第五步,在逆行思路的基础上将得到的单元阵列的高频子代系数进行重构,并中和分解得到的最低等的CT图像数组,最终将中和的数值通过双树小波重构函数的方法获取出全新的CT图像。
2.2 CT图像的增强
目前大多医院中CT图像的对比度较低,因此必须通过转换灰度级扩展灰度范围,以此增强CT图像分辨率,假设CT图像中像素点为(x,y),则其灰度级为g(x,y),利用映射函数q(·)得出CT图像的灰度级为h(x,y),即h(x,y)=q[g(x,y)]。
2.2.1 线性灰度变换
当CT图像在成像过程中存在曝光不足或过度曝光的情况时,会导致CT图像的对比度较低,导致CT图像模糊,无法辨认其中病灶,因此需要将CT图像的灰度进行线性拉伸,以此提高像素,更加清晰地看出CT图像中的细节[9]。
假设某个CT图像为g(x,y),其灰度变换的取值范围为[a,b],为线性拉伸CT图像,需要将CT图像g(x,y)的灰度变换的取值范围[a,b]映射为[c,d],此时的图像为h(x,y),则经过拉伸后的CT图像h(x,y)和原始CT图像g(x,y)的关系为
h(x,y)=c+(d-c)[g(x,y)-a]/(b-a)
(6)
2.2.2 分段线性变换
分段线性变换即将CT图像的灰度可变换范围划分成两段或两段以上后再进行线性变换[10]。分段线性变换的优点是可以根据用户的需求随意设置其拉伸图像的灰度级,同时还可抑制不需要的部分。假设将其分成三段进行变换,其中a,a′,b,b′,c,c′,d,d′等线性变换部位的边界可以利用指令任意进行交互式的输入,由此可证明分段线性变换的灵活性,则此时CT图像g(x,y)的线性变换方程为

(7)
2.2.3 非线性灰度变换
通过指数函数和对数函数同样可以对CT图像进行灰度变换[11],其中对数函数变换后的灰度可以将低灰度区域扩大的同时缩小高灰度区,但又不影响整体视觉效果。则采用对数和指数函数当作映射函数的非线性变换的表达式分别为
h(x,y)=ln[1+h(x,y)]/blnc+a
h(x,y)=bc[g(x,y)-a]-1
(8)
3 CT图像局部阴影特征提取方法
将CT图像进行小波阈值去噪和图像增强处理获取清晰CT图像后,即可对CT图像局域阴影特征进行提取[12],其提取过程为:
第一步:构建子空间,在CT图像局域阴影附近随机取一像素点,将像素点记为点p,并以点p为中心在CT图像上提取128*128的子空间S1和64*64的子空间S2。
第二步:通过二维Daubechies小波分解子空间S1,分解后可获得子图像集合,即将CT图像局域阴影部分分成若干个小图像形成子图像集合。小波分解的每一阶分解都会生成4张小波分解子图像,将4张子图像分别记为ILL,ILH,IHL,IHH,其中LL、LH、HL和HH均为CT图像的滤波器型号,且L代表低通滤波器,H代表高通滤波器,经分解后发现,CT图像局域阴影区域的信息数据大部分存储在ILL图像中,少部分信息存储于ILH以及IHL图像中,因此在提取CT图像局域阴影特征时只对ILL、ILH和IHL图像进行小波分解即可,因为高阶小波变换是在低阶图像ILL的基础上进行变换,所以为降低冗余数据含量,只能以最高阶子图像为目标进行CT图像局域阴影特征的提取。
第三步:由于图像ILH和IHL旋转后会发生变形,因此必须对每一阶的ILH和IHL图像进行预处理,防止其发生变形,以此获取旋转后不变性的CT图像局部阴影特征,则预处理的表达式为

(9)
其中,I(i,j)代表所有子图像的灰度值,k代表子图像ILH以及IHL的小波变换阶数,且k=1,2,3。
经过预处理后的子图像Ik(i,j)可替换原始子图像作为运算CT图像局部阴影特征的源图像。
第四步,提取图像ILL和Ik(i,j)的特征,并以ILL的中心为圆心,以r×n为半径,其中r≥2,N≥n≥1,以此获取出N个同心圆,其中N≥1,且r×2N必须小于等于子图像的宽度,在N个同心圆中选出两个半径分别为r和N-1的圆和圆环,将其组成具有纹理特征的基空间。
在半径为r×n圆内的所有圆环中求解CT图像局域阴影灰度值的概率密度分布pnr(x),其中x∈R(n),R(n)为圆中第n个圆环的灰度值集合。
则通过第n个圆环的概率密度分布为pnr(x),可得出圆环内局域阴影的特征值为

(10)
反复进行上述运算,直到获取出所有圆环中局域阴影的特征值,并从小到大排列所有特征值,建立与子图像ILL相对应的局域阴影特征,则其表达式为
VLL=u(n)×βσ(n)
(11)
其中,VLL代表ILL相对应的局域阴影特征,β代表经验系数。
利用上述运算求解出另外三张子图像相对应的局域阴影特征V1、V2和V3,并利用四张子图像的局域阴影特征构建出空间S1的对应特征,即
VS1=(VLL,V1,V2,V3)
(12)
通过上述步骤即可求解出空间S2的局域阴影特征。则CT图像局域阴影提取的特征为
TV=[β1×VS1,λ2×VS2]
(13)
其中,β1代表图像S1的经验系数,β2代表图像S2的经验系数,TV代表CT图像局域阴影特征。
4 实验与结果
为了验证所提方法的整体有效性,需要在Matlab平台中对CT图像局域阴影特征小波阈值提取方法、文献[4]基于改进多尺度LBP算法的肝脏CT图像特征提取方法和文献[5]纸基纳米金阵列图像特征值自动提取方法进行峰值信噪比、ROC曲线和特征分离度的测试。
4.1 峰值信噪比
选取5组在不同环境、像素、相机下的CT图像,利用三种方法对CT图像的局域阴影特征的峰值信噪比,得到三种方法测试结果如图1所示。
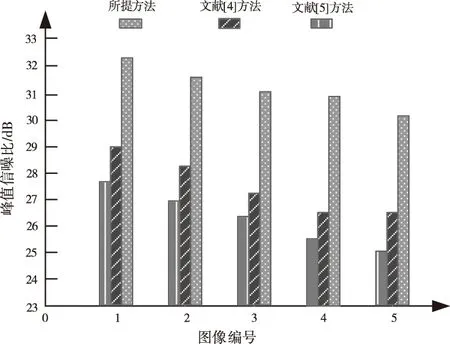
图1 不同方法的峰值信噪比
由图1中的数据可知,受到相机像素低,外界环境等干扰因素的影响会导致峰值信噪比降低,文献[4]方法的峰值信噪比相较于所提方法低,但高于文献[5]方法,而文献[5]方法的峰值信噪比最低,从而导致图像的关键细节模糊,影响病情的后续诊断,而所提方法的峰值信噪比虽有所降低,但其信噪比一直高于30dB,因为所提方法在提取CT图像局域阴影特征前对其进行了灰度变换处理,避免出现CT图像曝光不足或曝光过度的情况,进而提高了峰值信噪比。
4.2 ROC曲线
ROC曲线为真阳性率与假阳性率的比值,真阳性率即正确提取特征的数量与所有提取到的特征数量的比值,同理可知假阳性率,在ROC曲线中存在一条对角线,此对角线代表在提取过程中错误提取与正确提取的特征数量一致,因此曲线越高代表提取特征的正确率越高,得到所提方法与对比方法的测试结果如图2所示。

图2 不同方法的ROC曲线
由图2的ROC曲线可知,所提方法的ROC曲线最高,其它两种方法的ROC曲线都不同程度的低于所提方法,这是因为所提方法在确定CT图像去噪的关键阈值的基础上,利用小波阈值去噪的方法对CT图像进行细致的去噪,可以更加精确地提取CT图像的局域阴影特征,进而升高ROC曲线。
4.3 特征分离度
特征分离度为相邻特征之间被提取的时间差和相邻特征之间距离的比值,特征分离度测试中也存在一条对角线,该对角线代表理想条件下的特征提取效果,分离度越高,特征提取效果越好,由此得到三种方法的测试结果如图3所示。

图3 三种方法的特征分离度
根据图3可知,所提方法的特征分离度最高,文献[4]方法的分离度次之,文献[5]方法的分离度最低,所提方法的分离度高是因为在最终实现CT图像局域阴影特征提取前增强了CT图像的对比度,降低了CT图像中冗余数据含量,从而更加快速地提取CT图像局域阴影特征,以此提高特征分离度。
5 结束语
为更加完善目前CT图像局域阴影特征提取方法,提出CT图像局域阴影特征小波阈值提取方法,该方法首先对CT图像进行去噪等预处理,再利用灰度变换的方式提取图像特征,最后将所有特征结合,从而实现CT图像局域阴影特征提取。
1)仿真结果表明,所提方法的峰值信噪比虽有所降低,但其信噪比一直高于30dB;ROC曲线和特征分离度均高于对角线值;
2)今后的研究中将所提方法应用于更多领域的图像进行验证,以进一步优化,扩大局域阴影特征小波阈值提取方法的应用范围。
