基于显著性的遥感图像舰船目标检测
2021-12-10丁荣莉周飞宇
丁荣莉,李 杰,沈 霁,周飞宇
(上海航天技术研究院,上海 201109)
1 引言
随着光学载荷分辨率的不断提高和成像质量的提升,可见光遥感图像富含更丰富信息且能较真实的反应拍摄物体的形状、颜色和纹理等特征。舰船作为海上主要运输载体和重要军事目标,其状态掌控在军舰探测、精确制导等军用领域以及海面搜救、渔船监管等民用领域具有极其重要的战略意义。可见光遥感图像舰船目标检测引起国内外学者的广泛关注。
当前可见光遥感图像舰船检测算法可分为传统目标检测算法和基于深度学习的目标检测算法两类,其中传统目标检测算法的关键是通过人工设计特征将舰船从海洋背景中提取出来。文献[1]基于海洋图像灰度特性利用直方图提取目标候选区域,并通过长宽比和致密性去除虚警,但虚警率仍不满足实际需求。文献[2]将舰船检测问题视为在平稳变化的场景提取稀疏目标,提出了相位谱显著性算法进行舰船目标检测并取得较好检测结果,但对于弱暗目标的检测具有一定局限性。文献[3]针对不同方向的船只检测提出了一种求取旋转滑动窗口的方向梯度直方图(HOG)特征的方法来增加旋转不变性,利用支持向量机(SVM)分类器对特征进行判断从而提高检测性能,但HOG特征维数庞大且小目标漏检率高。随着人工智能技术发展,文献[4]提出一种将卷积神经网络自主提取图像特征与支持向量机分类器相结合的舰船目标检测方法,由于遥感图像获取困难,文中采用民船作为辅助样本对军舰进行检测。文献[5]设计了一个更加适合遥感图像目标识别的卷积神经网络,利用卷积浅层特征和卷积深层特征的融合来提升网络的识别性能,取得较高的准确率和召回率。
上述传统算法在复杂背景环境下检测性能不理想,而基于深度学习的检测算法需丰富样本进行训练且算法复杂度高。针对此本文提出粗检测和细鉴别相结合的技术路线以在高检测率的前提下降低算法复杂度,如图1所示。

图1 舰船方向划分
粗检测利用舰船目标与海洋背景的差异提取可能存在舰船目标的候选区域,细鉴别根据舰船与其它干扰因素的差别剔除候选区域虚警,提取出真正的舰船目标。
在进行海洋遥感图像舰船检测时,图像中可能存在陆地区域,由于陆地地貌环境的复杂性和地面物体的多样性,使得舰船检测难度大和虚警率高,因此首先采用基于GIS库的海陆分割算法对存在陆地的图像进行海陆分割以去除陆地区域。针对纯海洋图像首先采用谱残差法尽可能不遗漏对获取舰船目标候选区域,而后统计其S-HOG表征目标信息对舰船进行鉴别。
2 候选区域提取
视觉显著性模型能够模拟人脑机制,对周围复杂场景进行快速感知和综合判定。将图像中最能体现图像内容和吸引视觉注意力的目标区域称为显著性区域,其具有如下特征:1)局部差异性,显著性区域总是与周围区域存在明显特征差异;2)全局稀少性,在整幅图像中,大部分都是重复和冗余的背景区域,而显著区域特征出现的频率较低;3)高层语义特征,在自然场景中观察时,人总会经常注意的目标如人、船等往往是显著目标。
根据光学遥感图像特点,将人类视觉系统可快速聚焦于显著性区域的特性引入到舰船目标候选区域的提取中。自然图像统计特性具有尺度不变性,即自然图像集合的平均傅里叶谱的幅值服从1/f规律,不同图像数据的log谱具有相似的分布趋势,只需要关注其差异部分即显著性区域,忽略相似部分去除冗余信息。
对图像进行傅里叶变换将图像信息从时域转换到频域,其频谱表达式所示
F(u,v)=A(u,v)exp[iP(u,v)]
(1)
其中,F(u,v)表示图像傅里叶变换的频谱,A(u,v)表示图像的幅度谱,P(u,v)表示图像的相位谱。
SR谱残差[6]显著性模型将显著信息定义为输入图像的对数幅度谱log(A(u,v))与其平均对数幅度谱之间的差值,如式(2)所示
R(u,v)=L(u,v)-hn*L(u,v)
(2)
其中hn为局部均值滤波器对图像log谱进行平滑,接下来通过傅里叶反变换在时域重建图像即得到其显著性映射图。

(3)
g(x,y)为二维高斯滤波器对图像显著性映射图进行平滑,显著性映射图可增强目标与背景对比度,接下来可通过自适应阈值分割得到目标前景信息,阈值取值如下
T=u+cσ
(4)
其中u为图像的均值,σ为图像的方差,c为经验系数。自适应阈值分割后可得到舰船目标的候选区域图像如图2所示。

图2 遥感图像和其SR显著性映射二值化图像
从图中可以看出SR算法能有效提取出目标的候选区域,同时受海杂波影响存在较多的噪点。当舰船部分灰度与海洋背景相近时,二值化前景结果中可能存在孔洞,导致候选区域的连通性较差。为便于后续的舰船细鉴别,可先采用膨胀算法填充连通域孔洞,再利用腐蚀算法去除图像噪点。谱残差法对图像进行显著性映射适用于不同分辨率的海洋图像和不同像素点尺度的舰船目标。
3 S-HOG原理
遥感图像数据中可能存在与舰船目标相似的干扰如碎云、岛屿、波浪等,导致候选区域提取结果中除舰船目标外可能存在虚警,因此需要进一步提取舰船目标本身特征从而鉴别目标、剔除虚警。通过分析舰船目标与虚警目标特征的差异性,提出采取S-HOG特征进行舰船目标鉴别和虚警剔除。
3.1 PCA规则化目标切片
PCA主成分分析方法常用数据降维,通过线性变换将原始数据映射为一组各维度线性无关的表示,可用于提取数据的主要特征分量。
因S-HOG方向区间的特殊划分和判别条件的设置,要求切片目标的长轴与竖直方向平行,而遥感图像中舰船目标常为任意方向,因此需首先对目标候选区域进行规则化。舰船呈细长几何对称性质,目标像素点集中分布在舰船主轴方向上,可通过PCA计算目标像素点的最大方差方向即舰船第一主轴方向,得到目标与竖直方向夹角并旋转使其和竖直轴方向保持平行。对显著性映射得到的目标候选区域提取其8连通域得到疑似目标切片像素点个数为N,每个像素点可由二维坐标向量表示

(5)
若目标与竖直方向夹角为θ,变换后的新坐标系为Y1-Y2,则目标像素点的集合在新坐标系中表示如式(6)所示,由此得到规则化目标切片。

(6)
3.2 S-HOG
梯度方向直方图(Histogram of Oriented Gridients,HOG)特征最早由Dalal等在CVPR-2005提出,是一种用于表征图像局部梯度方向和梯度强度分布特性的描述符从而广泛被用于物体目标检测。基于HOG原理,根据舰船几何和纹理特征以及遥感载荷成像特点,提出了S-HOG舰船鉴别算法。按图 3将舰船切片梯度方向划分为8个特定区间1D-8D,以8个方向区间序号为直方图横轴,以对应方向区间的梯度幅值累加值为纵轴统计其S-HOG特征[7]。

图3 S-HOG方向划分
为更有效的剔除和舰船相似的伪目标,将舰船切片分为B1、B2和B3三部分计算其舰船梯度方向特直方图征,舰船切片分块方法如图4所示,舰船整体切片为B1,切片水平均匀分割为B2和B3上下两部分。
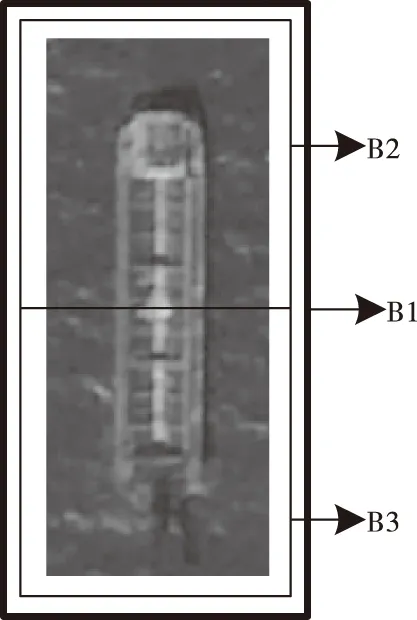
图4 舰船方向划分
舰船呈长条状对称分布且垂直方向幅值变换较大可推测bin1和bin5统计值应高于其它bins且bin1和bin5对称分布。舰船、碎云和岛屿切片的梯度方向直方图特征如图5所示。
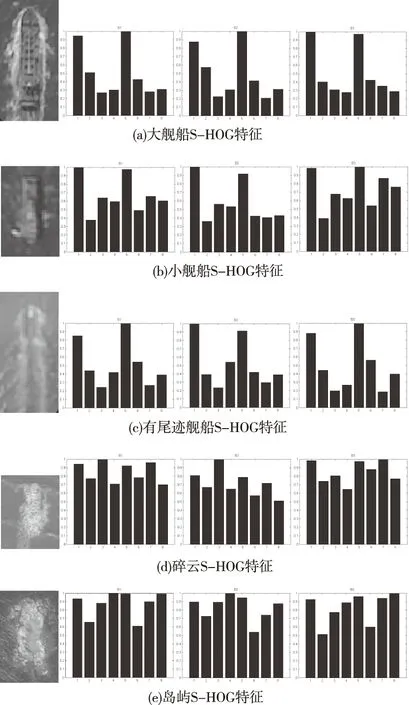
图5 切片S-HOG特征
从上图可以看出,相比于碎云和岛屿等容易造成虚警的物体,舰船的方向梯度直方图基本符合理论分析。因卫星载荷成像受光照的影响以及图像中存在海杂波的干扰,bin1和bin5统计值近似等高,有一定的偏差。根据梯度方向直方图特征设置式(7)-(9)进行舰船鉴别。

(7)

(8)
(9)

基于S-HOG特征的舰船鉴别算法不受图像和舰船目标尺寸限制,具有较高的鲁棒性且对图像分辨率有一定的自适应性。
4 实验结果
为验证上述算法的检测性能,对4k*4k大小的GF-2图像进行切片裁剪构建数据集。图像分别率为2米,经过图像内容筛选和目标标定得到200张512*512图像切片,共包含82只舰船目标。图像数据集的背景包括无云平静图像、无云风浪图像和有云图像。
为评估算法性能,给出常用评价指标准确率和虚警率定义,计算公式如下
Far=fp/(tp+fp)
(10)
Cr=tp/nops
(11)
其中Cr表示检测的准确率,Far表示虚警率,npos表示图像中真实舰船目标个数,tp表示正确检测到舰船目标的个数,fp表示检测到的虚警个数。
对图像数据集进行舰船目标检测,部分检测结果如图6所示。

图6 舰船检测结果
从检测结果图可以看出不同背景条件下、尺度不同的舰船均能被准确检出并标记,且能有效剔除碎云和岛屿等形态相似干扰物的影响,算法检测性能好、抗干扰能力强。
将图像数据集的舰船目标分为大舰船(长度大于50像素)和小舰船(长度在10~50像素之间)两类,分别统计其目标检测结果。并将算法检测性能与文献[2]的PFT算法进行比较,具体结果如表1所示。
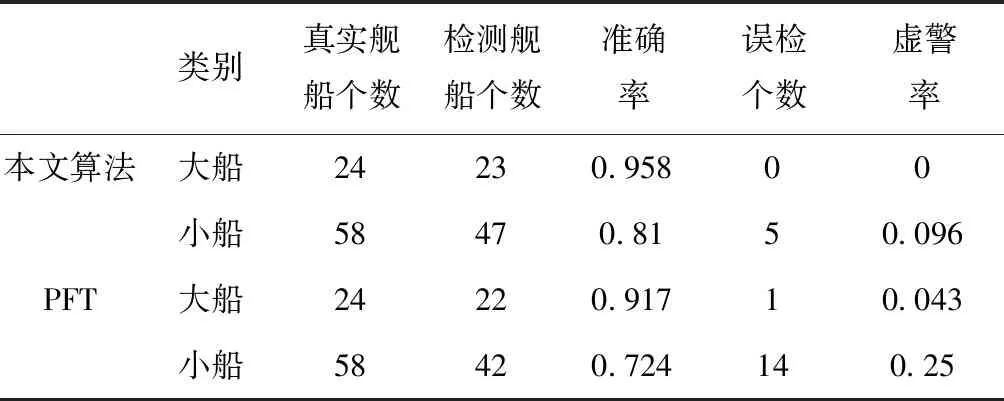
表1 舰船检测结果
根据舰船检测统计表可以看出,本文算法能较理想的检测出大舰船目标,但当舰船所占像素点较少且海面背景环境复杂时,显著性映射结果不理想,小舰船检测准确率相比大舰船有所下降。同时算法抗干扰能力强,虚警率较低。PFT算法在舰船目标与背景对比度较低时可能会产生漏检,其采用舰船面积进行舰船鉴别的虚警率较高。综上,相比于PFT算法,文中算法采用SR算法进行显著性映射的图像增强效果更好,舰船检测率更高,且能有效剔除碎云和岛屿等形态相似物的干扰、抑制风浪造成的海杂波干扰,显著降低了舰船检测的虚警率。
5 总结
为了提高复杂海面背景下可见光遥感图像舰船检测的性能,本文提出了一种基于显著性的检测算法。首先采用谱残差法对图像进行显著性映射并通过自适应阈值分割得到目标前景二值化图像,从而提取舰船目标候选区域,然后对候选区域进行规则化并统计其S-HOG特征进行舰船鉴别。实验结果表明显著性映射算法能有效提取疑似目标的候选区域,算法检测精度高,同时S-HOG特征能有效从疑似目标中提取出真正的舰船目标,算法虚警率低。该算法可以有效克服海杂波、碎云、岛屿等因素的干扰且适用于不同尺寸的舰船目标检测,但当海面有波浪时弱暗目标的检测性能需进一步提高。
