基于多目标优化的智能车辆自适应巡航控制研究
2021-12-09陈文斌
陈文斌

摘要:为了提高车辆的自适应巡航控制效果,提出了一种基于多目标优化的自适应巡航控制算法。首先,通过视觉传感器和雷达能够准确检测到前方车辆从而得到两车之间的相对距离和相对速度信息;其次,建立模型预测控制器,从而实现跟踪控制的多目标优化效果。仿真结果表明:车辆自适应巡航控制时,其跟踪性能、乘坐舒适性和安全性都有较好的效果。
Abstract: In order to improve the effect of adaptive cruise control, an adaptive cruise control algorithm based on multi-objective optimization was proposed. First through the vision sensor and radar can accurately detect the vehicle in front so as to get the relative distance and relative speed information between two vehicles; Secondly, a model predictive controller is established to achieve the multi-objective optimization effect of tracking control. The simulation results show that the tracking performance, ride comfort and safety of the adaptive cruise control have better results.
关键词:智能车辆;自适应巡航控制;多目标优化
Key words: intelligent vehicle;adaptive cruise control;multi-objective optimization
中图分类号:U469.7 文献标识码:A 文章编号:1674-957X(2021)23-0239-02
0 引言
自适应巡航系统(Adaptive Cruise Control,ACC)使车辆按照驾驶员设定的速度和距离行驶,具有辅助驾驶的功能[1]。目前,国内外学者对ACC的研究较为广泛,文献[2]为了提升车辆在跟驰过程中的跟踪精度,利用粒子群优化算法对最优控制律进行优化,从而提高了车辆的跟踪性能和自适应性。本文提出了一种基于多目标优化的弯道下车辆自适应巡航多目标优化控制研究,可以有效的改善跟踪精确性、安全性、舒适性。
1 智能车辆运动学建模
ACC在保证车辆速度跟随的同时还能根据车速的变化自适应的保持与前车的安全距离。本文根据车辆之间的运动关系建立了车间运动学模型。将车辆之间的期望距离表示为[3]:■(1)
式中,ddes为车辆间的期望距离;ve为自车的速度;te为自车的安全时间;d0为自车与前车的固定距离。
自车的实际加速度ae与期望加速度ades的关系可表示为:■(2)
式中,K为增益;T为时间常数。
车辆之间的运动学关系如图1所示,由式(1)和式(2)可以得到车间的距离误差和误差为:■(3)
式中,ve为自车速度;vf为前车速度;d为自车与前车的实时距离。
当得到上述关系时,可建立状态空间方程如下:
■(4)
式中,状态变量■;控制变量■;将前车加速度作为系统干扰f=af;系统输出y=x。
上述模型中,对于目标车辆的相对距离和相对速度可以通过雷达和摄像头获取。
2 基于雷达和视觉信息的车辆检测
2.1 基于毫米波雷达前方车辆检测
它主要是通过对目标物发送电磁波并接收回波来获得目标物体的距离、速度和角度。可以用来进行测距、测速、测角度、目标有无的检测[4]。雷达检测的目标包括车道上的车辆以及道路边界。通过雷达能够有效识别目标自车与目标车辆的相对距离和相对速度,通过上述目标检测即可确定检测范围内的有效目标,从而进行相应的自适应巡航控制。
2.2 基于视觉的前方车辆检测
其检测的步骤有三步:首先,选取相应一定数量的样本并进行灰度化和归一化处理;其次,对样本进行Haar-like矩形特征操作;最后将Adaboost算法与Haar-like矩形特征相结合形成分类器即检测车辆。在文中通过视覺传感器可以检测车道并提供车道相对于本车辆的横向位置的估计,以及相对于本车辆车道场景中的其他车辆的切入状况,从而能够准确切换跟车目标,达到最优的自适应巡航控制。
3 基于多目标优化的模型预测控制器设计
3.1 预测模型
车辆在跟车的过程中要考虑其安全性、舒适性、精确性等指标。由式(4)对其进行离散化得到:
■(5)
式中,■;■;■;■;T为采样步长。
由模型预测控制理论可以推导出预测步长p内的预测输出为:
■(6)
式中,H1、H2、H3、I可由式(5)推得。
3.2 多目标约束分析
3.2.1 安全性
在预测时域中需要跟车距离d(k+p)和跟车速度ve(k+p)满足如下约束:
■(7)
式中,dmin为安全距离;vmax为跟车速度。
3.2.2 精确性
在跟车过程中应尽量使其距离误差和速度误差趋近零从而达到跟踪的效果,其目标函数可表示为:
■(8)
式中,■、■分别为预测时域内的跟踪距离误差和速度误差。
3.2.3 舒适性
选取自车在预测时域内的縱向加速度为舒适性指标,同时又要满足上述指标的要求,其目标函数可表示为:
■■■
■(9)
由上述指标可以得到车辆在跟车过程中的总的代价函数为:
■(10)
4 仿真分析
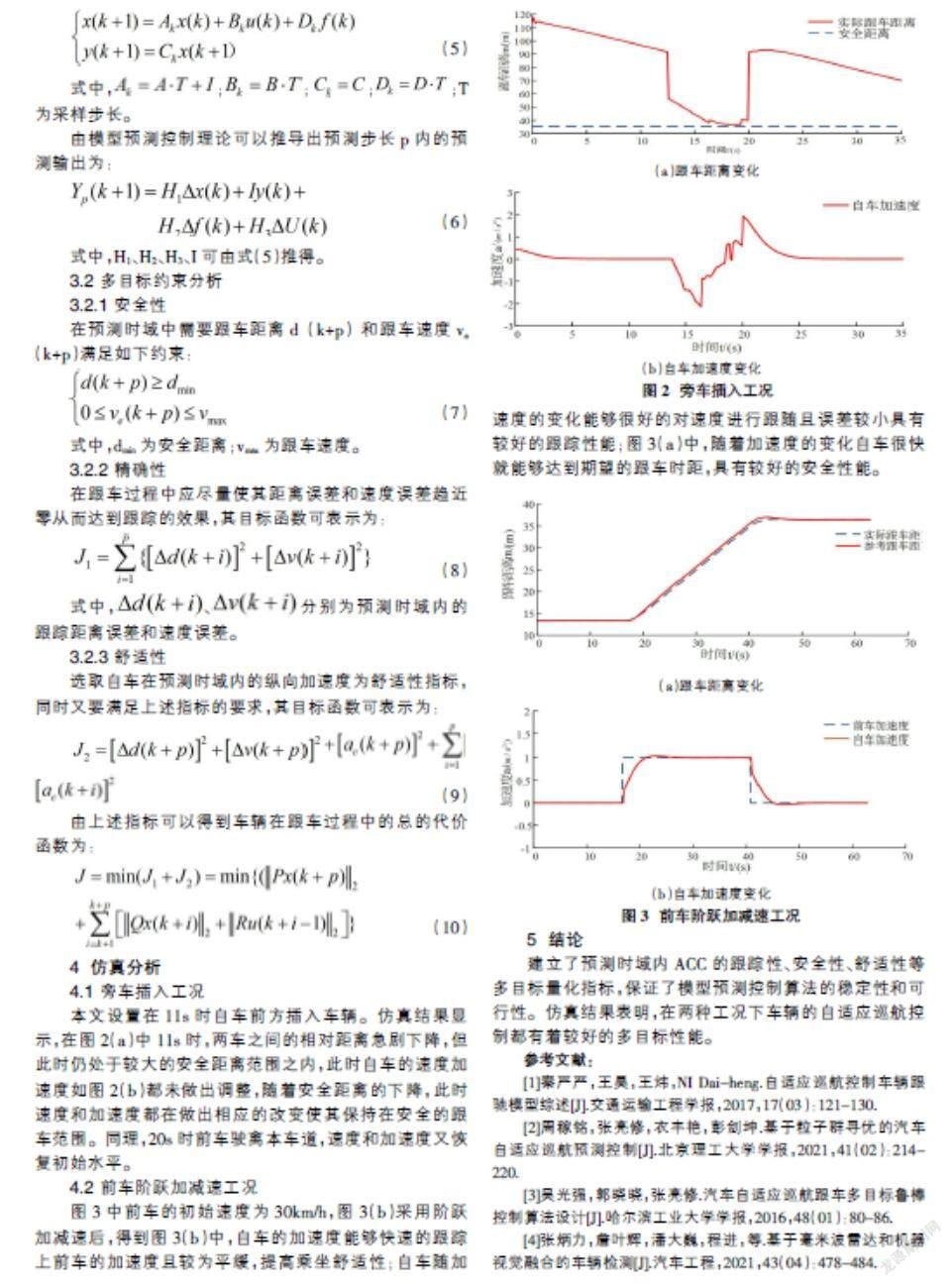
4.1 旁车插入工况
本文设置在11s时自车前方插入车辆。仿真结果显示,在图2(a)中11s时,两车之间的相对距离急剧下降,但此时仍处于较大的安全距离范围之内,此时自车的速度加速度如图2(b)都未做出调整,随着安全距离的下降,此时速度和加速度都在做出相应的改变使其保持在安全的跟车范围。同理,20s时前车驶离本车道,速度和加速度又恢复初始水平。
4.2 前车阶跃加减速工况
图3中前车的初始速度为30km/h,图3(b)采用阶跃加减速后,得到图3(b)中,自车的加速度能够快速的跟踪上前车的加速度且较为平缓,提高乘坐舒适性;自车随加速度的变化能够很好的对速度进行跟随且误差较小具有较好的跟踪性能;图3(a)中,随着加速度的变化自车很快就能够达到期望的跟车时距,具有较好的安全性能。
5 结论
建立了预测时域内ACC的跟踪性、安全性、舒适性等多目标量化指标,保证了模型预测控制算法的稳定性和可行性。仿真结果表明,在两种工况下车辆的自适应巡航控制都有着较好的多目标性能。
参考文献:
[1]秦严严,王昊,王炜,NI Dai-heng.自适应巡航控制车辆跟驰模型综述[J].交通运输工程学报,2017,17(03):121-130.
[2]周稼铭,张亮修,衣丰艳,彭剑坤.基于粒子群寻优的汽车自适应巡航预测控制[J].北京理工大学学报,2021,41(02):214-220.
[3]吴光强,郭晓晓,张亮修.汽车自适应巡航跟车多目标鲁棒控制算法设计[J].哈尔滨工业大学学报,2016,48(01):80-86.
[4]张炳力,詹叶辉,潘大巍,程进,等.基于毫米波雷达和机器视觉融合的车辆检测[J].汽车工程,2021,43(04):478-484.