无人自转旋翼机建模与控制方法研究
2021-12-07董鹏程李爱国柴嘉薪
董鹏程 李爱国 余 跃 曹 煜 柴嘉薪
北京航天自动控制研究所, 北京 100854
0 引 言
旋翼机早于直升机出现,其在旋翼原理与技术等方面的突破为后来直升机的诞生与发展奠定了基础。由于独特的气动构型,它既有不同于直升机和固定翼飞机的地方,又有与二者相近的地方。旋翼机的机身上方有与直升机类似的旋翼,与直升机不同的是它的旋翼是无动力的,依靠相对气流的带动实现自转,为旋翼机提供升力。另外,旋翼机在机身前进的方向上安装有发动机,依靠发动机驱动螺旋桨旋转提供推力或是拉力,使飞机向前飞行,这一点与固定翼飞机类似。从外在构型上看,无人旋翼机属于旋翼类飞行器;由于其特殊的构型,具有结构简单、经济性好、起降距离短、飞行安全性高及振动噪声低等优点[1],旋翼机在民用及部分军用场合有着较为广阔的应用前景。
目前国外对于自转旋翼机的飞行性能及建模研究均是针对有人自转旋翼机。Houston[2]等以轻型有人旋翼机为研究对象,开展了旋翼机空气动力学建模及旋翼空气动力学的研究,并通过飞行试验的数据修正了建模的不足。Niemi和Gowda[3]通过数值计算和试验等手段从旋翼挥舞运动和转速变化等角度对自转旋翼机的气动特性进行了研究。国内对无人自转旋翼机的研究大多都是建模与数学仿真。南京航空航天大学直升机设计研究所在自转旋翼气动特性方面进行过研究,并曾经配合军方和民营公司从国外引进小型旋翼机,积累了一定的旋翼机设计和使用工程经验[4,5]。北航飞行器控制一体化国防重点实验室以小型旋翼机为研究对象,主要研究升降化辅助操纵的自转旋翼机自适应姿态控制[6,9]。目前国内外对自转旋翼机无人驾驶方面的工程实现很少,世界上还没有成熟的无人自转旋翼机面世。
本文研究的是某无人机公司自主研发的无人自转旋翼机。首先针对旋翼、动力系统、机身、尾翼分别建立动力学非线性模型,然后设计了各回路通道的控制律,基于叶素法的旋翼建模方法与控制律首次应用于国内大型无人自转旋翼机的飞行试验。最后通过飞行试验验证了模型的准确性及控制律的有效性。
1 样例自转旋翼无人机
同任何重于空气的飞行器一样,旋翼机飞行时受到升力、重力、推力和阻力的作用。升力来自于旋翼系统,推力来自螺旋桨。旋翼产生的力(旋翼拉力)在纵向平面内可以分解为2个分量:旋翼升力和旋翼空气阻力。此外还应将机身阻力考虑在内。与固定翼飞机操纵升降舵进行高度爬升类似,旋翼机爬升过程中,可以操纵旋翼纵向变距舵,改变旋翼桨盘俯仰角,实现旋翼拉力在竖直方向分量的大小,从而克服重力及阻力的影响进行爬升,实现高度的控制。
图1是样例无人机的实物图,其基本构成要素包括:旋翼系统、动力装置(发动机)、机身、垂尾和起落架。其操纵机构包括纵向的升降舵、横向的倾斜舵、发动机油门舵、方向舵。主要参数如表1所示。

图1 样例无人机
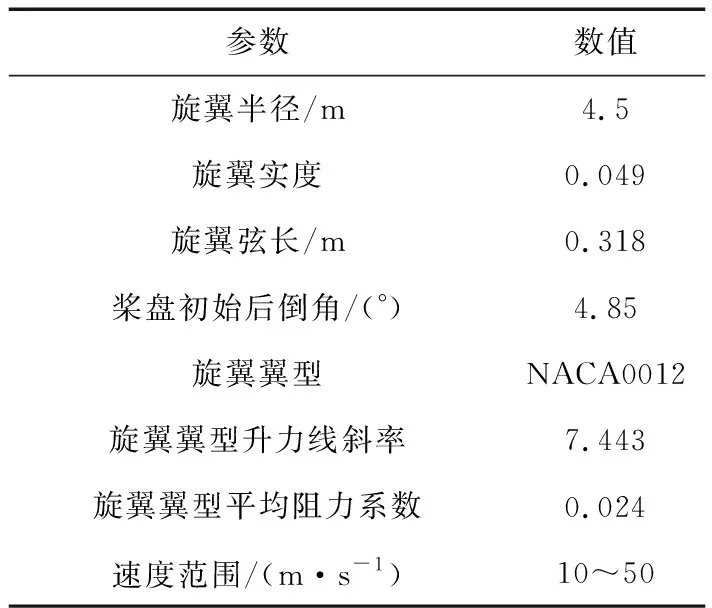
表1 样例无人旋翼机主要参数
2 旋翼机飞行动力学建模
2.1 机体动力学方程
自转旋翼机在机体坐标系中的气动力与气动力矩包含3个部分:推力螺旋桨、固定翼和旋翼的气动力与气动力矩。
在机体坐标系中,自转旋翼机的非定常运动方程组由六自由度欧拉运动方程、机体姿态方程和旋翼转速方程共同构成,如式(1)~(5)所示。
(1)
(2)
(3)
(4)
(5)
式中:作用在旋翼机重心处的合力、合力矩可分别表示为
(6)
(7)
式中:gyro为旋翼、tj为螺旋桨、plane为机身、VF为垂尾,Qgyro为作用于旋翼的反扭矩,Igyro为旋翼系统对旋转中心的转动惯量。
2.2 旋翼气动力
根据旋翼机受力分析可得到机体坐标系中旋翼的气动力和气动力矩[6],如式(8)所示。
(8)
式中:δ为旋翼轴初始后倒角;β为侧滑角(xM,yM,zM)为机体坐标系中桨毂中心的坐标;(*)gyro为自转旋翼气动力/力矩在体轴系的分量。
2.3 机身气动力
根据旋翼机受力分析可得到机体坐标系中机身的气动力和气动力矩,如式(9)所示。
(9)
2.4 尾翼气动力
根据旋翼机受力分析可得到机体坐标系中垂尾的气动力和气动力矩,如式(10)所示。
(10)

2.5 推力螺旋桨气动力
对于自转旋翼机而言,通常仅考虑螺旋桨产生的推力和扭矩。根据螺旋桨效率及发动机轴功率,由给定前飞速度,可得出该状态下螺旋桨可输出的最大推力
(11)
式中:η为螺旋桨效率,P为发动机轴功率。
螺旋桨产生俯仰方向的扭矩
My=-T·ytj
(12)
式中:ytj为推力线与重心的距离,高于重心为正。
3 控制律设计
各通道的控制律如式(13)~(16)所示。
1)滚转通道控制律为
(13)
(14)
2)俯仰通道的控制律为:

(15)

(16)

式中:δT为油门操纵量:KH,KIH和KdH分别为高度比例增益、高度积分增益和高度微分增益。
4 非线性仿真验证
飞行控制系统控制律的设计都是以某一个平衡状态下的刚体运动的小扰动方程为模型的,在其他平衡状态,即不同的质量、高度、速度的条件下,飞机的抗干扰能力是不同的。因此需要进行非线性仿真对控制律设计结果进行验证。
4.1 纵向控制律仿真验证
1)俯仰姿态控制结果
俯仰姿态控制仿真曲线如下图所示,从图2中可看出,姿态控制具有很好的跟踪效果,能够满足飞行控制系统的要求。

图2 俯仰角阶跃响应曲线
2)高度控制结果
图3为无人旋翼机高度控制阶跃响应曲线,可以看出,输入信号为阶跃信号时,高度控制超调较小,验证了高度控制律的可行性。
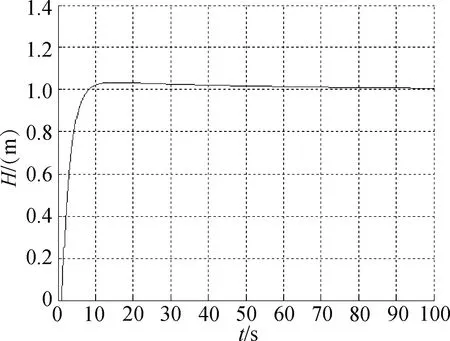
图3 高度阶跃响应曲线
3)空速控制结果
图4为无人旋翼机空速控制阶跃响应曲线,可以看出,输入信号为阶跃信号时,空速控制超调较小,验证了速度控制律的可行性。

图4 空速阶跃响应曲线
4.2 横侧向控制律仿真验证
1)滚转姿态控制结果
图5为无人旋翼机滚转角阶跃响应曲线,可以看出,输入信号为阶跃信号时,滚转角超调量相比俯仰角要小,调节时间要长,20s 后达到稳态值,稳态误差为0。

图5 滚转角阶跃响应曲线
2)侧偏控制结果
侧偏控制仿真曲线如图6所示,可以看出,侧偏控制具有很好的跟踪效果,能够满足飞行控制系统的要求。

图6 侧偏阶跃响应曲线
5 飞行试验验证
图7是飞行试验数据和模型解算出的纵向线性气动模型数据,数据包括迎角、俯仰角速率和纵向过载。图8是横向线性气动模型数据,数据包括侧滑角、滚转角速率和偏航角角速率。其中,实线是飞行试验测量出的数据结果,虚线是模型解算出的仿真结果。可以看出,飞行试验数据同仿真数据拟合程度较高,既证明了数据测量的可靠性,也表明模型解算无误,求得的气动参数较为真实可靠。

图7 纵向模型与实际飞行数据拟合图

图8 横向模型与实际飞行数据拟合图
图9~10是巡航平飞段飞行试验数据结果,从图中可以看出在外场试验风速情况较差条件下平飞段跟踪空速指令较好(空速指令为32.5m/s),说明空速控制律的有效性。平飞段高度控制超调较大,参数需要优化设计。

图9 巡航平飞段飞行试验空速曲线

图10 巡航平飞段飞行试验高度差曲线
6 结论
1)通过对旋翼机的旋翼、螺旋桨、垂尾和机身各个组成部分建模分析,获得了旋翼机的运动方程,建立了无人自转旋翼机的全量非线性数学模型,在此基础上应用小扰动线性化的方法得到了无人自转旋翼机的线性化数学模型,为后续研究无人自转旋翼机的运动特性和控制律的设计提供了有效的验证平台。
2)针对样例无人自转旋翼机的特点,对旋翼机的姿态控制、航向控制、高度控制、速度控制及发动机控制进行研究,设计了相应的控制回路和控制律,并通过仿真验证了控制律的有效性。
3)通过实际飞行试验验证了建模的准确性和控制律的有效性。
