飞秒激光制备的高灵敏度气压探针传感器
2021-12-07郭小珊叶文豪孙四梅刘昌宁
郭小珊,王 解,叶文豪,江 超,孙四梅,刘昌宁
(湖北师范大学物理与电子科学学院,湖北 黄石 435002)
1 引 言
气压是环境的基本参数之一,在工业生产与日常生活中经常需要监测气压的变化。人们已经开发出一些全光纤气压传感器,主要有光纤光栅气压传感器[1-2]和光纤干涉仪气压传感器[3-5]。在光纤干涉仪中,尤其以法布里珀罗(F-P)干涉仪构成的气压探针传感器最多见[6-17]。由F-P腔构成的光纤气压传感器一般有两种典型结构:①第一种结构是基于开放F-P腔构成的气压传感器[6-11]。主要利用环境气压变化引起F-P腔内气体折射率改变实现气压测量。此类传感器结构稳定牢固,温度串扰小,但灵敏度不高。另外,普通光纤本身并不带有气孔,要形成一个与外界连通的开放F-P腔,通常需要采用激光加工或者腐蚀的方式制作微孔或者凹槽,形成开放结构,制作工艺相对繁琐。虽然各种带有气孔的光纤被研制出来后,可以直接拼接形成气腔,但还是需要制作气腔与外界连通孔,制作成本高,工艺复杂。②第二种结构是基于薄膜结构构成的F-P干涉仪气压传感器[12-17]。主要利用环境气压变化造成薄膜发生形变,从而使F-P腔的腔长变化实现气压测量。薄膜可以镀在光纤端面,也可以镀在一些空芯结构端面。此类结构气压传感器灵敏度很高,响应速度极快。但也存在膜层制作难度大,承受气压小,易氧化等缺点,限制了传感器的使用寿命。现在随着膜层制作工艺的改进,这种高灵敏度的气压传感器越来越受到人们的重视与青睐。毛细石英管(CQT)类似于空心光纤,性能稳定,机械强度高,对温度敏感度小,利用它制作的F-P干涉仪传感器性能优良[10-11,18]。本文利用毛细石英管设计了一款新型F-P干涉仪气压探针传感器,传感器的F-P腔由单模光纤、毛细石英管及毛细石英管末端镀的聚乙烯醇(PVA)薄膜构成。详细论述了传感器的制作方法,分析了传感器测量气压的原理,研究了传感器的气压与温度传感特性。
2 传感器结构与原理分析
2.1 传感器的制作
为了选择合适的毛细石英管参数与确定传感器中毛细管的长度。首先利用光学仿真软件Rsoft对光在自由空间传输进行仿真,得到光从单模光纤纤芯自由空间传播的空间功率分布图如图1所示。从图1中可以发现,光从单模光纤纤芯向前传播100 μm时,光束主体还是束缚在直径大约为30 μm的圆柱空间中。因此如果选用内径较小毛细管时,光束可能会传输到毛细管管壁中,增加了原理分析与实验分析的复杂性;当选用内径大于30 μm的毛细石英管时,能够确保光束都在毛细石英管的管腔中传输,管壁中无光束传输,分析起来比较简单,光束也比较好控制。因此我们在传感器中选择Polymicro Technologies公司生产的TSP075150型号毛细石英管,该管内径为75 μm,外径为150 μm,管壁为高纯度石英玻璃。

图1 光从单模光纤纤芯前向传播的光功率分布图Fig.1 Optical power distribution of light propagating forward from single mode fiber core
图2为传感器结构与光路图以及毛细石英管示意图,传感器的F-P腔由单模光纤和毛细石英管以及毛细管末端的PVA膜构成。单模光纤采用武汉长飞光纤光缆有限公司生产的普通标准单模光纤,纤芯/包层直径为9 μm/125 μm;毛细石英管选用TSP075150型号,它的外径为150 μm(包含表面涂层),除去表面涂层后,毛细石英管的实际外径为126 μm,与普通单模光纤外径125 μm基本一致。两者都是石英结构,因此能够用光纤熔接机对它们进行熔接。在传感器制备过程中有几个关键技术:单模光纤与毛细石英管的熔接;毛细石英管长度的精确控制;毛细石英管端面PVA薄膜的涂覆。下面进行详细论述:
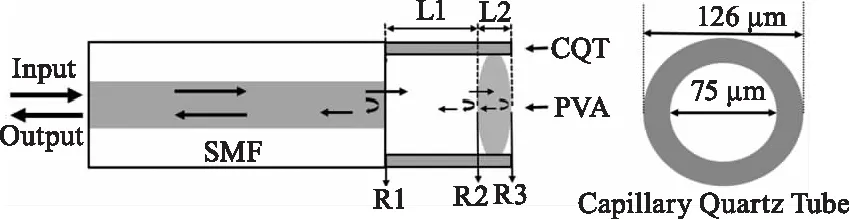
图2 传感器的结构与光路图及毛细石英管示意图Fig.2 Structure and optical path diagram of sensor and schematic diagram of capillary quartz tube
第一步,单模光纤与毛细石英管的熔接。虽然单模光纤与毛细石英管外径基本一致,但由于单模光纤是与空心的毛细石英管熔接,熔接它们必须采用专门的熔接参数与熔接方式。我们利用Fujikura FSM-100+大芯径光纤熔接机对光纤与毛细石英管进行熔接。由于毛细石英管表面涂覆了一层聚酰亚胺聚合物,无法利用光纤剥线钳剥离,因此采用燃烧法将毛细石英管表面涂覆层去除,用无水酒精擦拭干净后,再用光纤切割刀将其端面切平整。经过手动调节与尝试,获得最佳熔接参数,完成单模光纤与毛细石英管的熔接。
第二步,利用飞秒激光精加工技术精确切割控制毛细石英管的长度。在实验中为了获得较大自由光谱范围(FSR),我们选择毛细石英管长度在30~60 μm之间。在这么短的毛细石英管中,光束传播直径扩散很小,光束全部在毛细管的空气腔中传输。如此短而且精确的毛细石英管长度,采用一般办法无法切割获得。由于飞秒激光在精密加工光学透明材料方面的突出优势[19],我们采用实验室搭建的飞秒激光微加工系统对毛细石英管进行精确切割,图3为搭建的飞秒激光微加工系统,所用飞秒激光器波长为800 nm,频率1 kHz,出光功率为4.7 W。飞秒激光切割毛细石英管的工艺参数与过程描述如下:
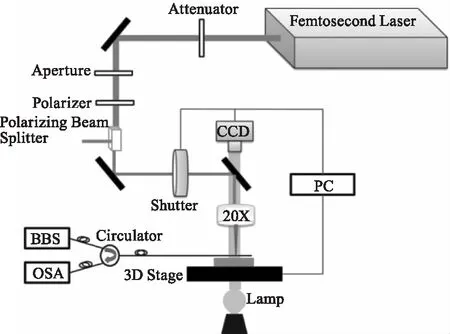
图3 飞秒激光切割毛细石英管的微加工系统Fig.3 Micromachining system for femtosecond laser cutting capillary quartz tube
① V型玻璃槽放置毛细管。在切割时毛细管受力会移动,我们采用大小合适的V型玻璃槽来放置毛细管。为防止激光损伤V槽,将毛细管与单模光纤拼接好之后放置在V槽上,V型槽固定在三维平移台上,切割点伸出V型槽形成悬空方式。
② 加工物镜选择。因为聚焦物镜的倍数越高焦点越近,光斑越小瑞利长度越短,因此在综合考虑后选择20倍的物镜对激光进行聚焦。
③ 激光加工功率选取。毛细管切割时必须仔细选择激光功率,飞秒激光出光口功率4.7 W,通过衰减系统对光功率进行调节,经过多次尝试,最后确定切割功率为5.4 mW,此功率经过20倍物镜聚焦后不会对毛细管表面造成裂痕,能较好完成对毛细管的切割。
④ 切割方式的确定。激光先聚焦在毛细管的上表面开始切割,逐层往下切割,直至把毛细管完全切断。为了保证切割质量,利用折射率匹配液辅助切割,带走切割残渣。图4为切割后的传感器图片,从图片中可以看到毛细管切割端面较为齐整,毛细管切割后长度约为50 μm。
第三步,毛细石英管端面制备PVA薄膜。PVA薄膜是一种性能比较稳定的有机材料,也常常被用在传感领域制作传感器[20-21]。PVA薄膜的制备步骤如下:
① 配置PVA溶液:将PVA颗粒与去离子水混合后形成5 %(wt/wt)的混合液体,然后将其放到磁力搅拌器上,在温度为90 ℃,转速640 rpm的条件下,水浴加热1 h,使PVA颗粒充分溶解,形成PVA溶液。
② 使用提拉法制备PVA膜:先将准备好的熔接结构的毛细管端放入PVA溶液中,毛细管吸入PVA溶液,然后利用步进电机从PVA溶液中提拉出传感头,通过控制步进电机速度来控制PVA薄膜厚度。
③ PVA薄膜进行干燥:将镀膜后的结构放入真空干燥箱中,在80 ℃温度下烘干1 h。
④ 薄膜质量检测:将制作完成的传感器结构放在金相显微镜下观察,看膜层是否均匀,膜形状与厚度是否符合要求。如果不符合要求,需要重新进行多次镀膜。
最后,将制备好的结构分别与宽带光源和光谱分析仪连接在一起,观察结构的反射谱,如果反射谱不理想,再调节结构的参数,以获得理想的反射谱,最终完成传感器结构的制作。将制作完成的传感器结构放在金相显微镜下拍摄,实物图如图4所示,发现PVA膜基本在毛细管内部相当于一个凸透镜,测得PVA膜凸面厚度约为10 μm,毛细石英管中空腔长度约为40 μm,毛细管传感头总长约为50 μm。
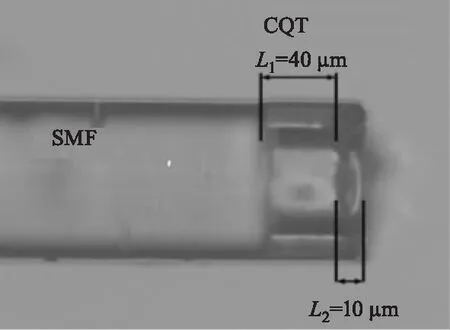
图4 传感头在显微镜下的实物图Fig.4 Optical microscope images of the sensor
2.2 传感原理分析
传感器的光路示意图如前面图2所示,传感器共有三个反射面,单模光纤的末端截面R1,毛细石英管与PVA膜的内接触面R2以及PVA膜与外界空气接触面R3,其中R1、R2、R3为三个面的反射率。传感器结构相当于两个F-P腔的级联,一个由R1和R2构成的F-P腔,另一个由R2和R3构成的F-P腔。在制备PVA膜时,PVA液体流入毛细管内部,经过干燥形成薄膜,薄膜内表面形成一个反射率为R2的反射曲面,但弯曲程度较小,由于光线主要集中在镜面中间部分反射,可以把它们近似看着是平面镜反射,这一近似方法在其他文献中也被用到[20-21]。光源发出的光被这三个镜面反射,三束不同光路的光因为不同相位延迟而产生干涉。输出反射光干涉光谱强度可以表示为[22]:
(1)

(2)
nPVA是PVA膜折射率;nair是空气腔中空气介质的折射率,L1为空气腔长度;L2为PVA膜的厚度;λ为自由空间光波长。当满足相位条件时,传感器将会形成稳定的干涉图谱。当干涉仪的相关参数确定以后,能够利用MATLAB软件模拟仿真干涉仪的光谱图。设nco=1.46,nPVA=1.52,nair=1,k1=k2=0.11,L1=45 μm,L2=5μm,R1=0.034,R2=R3=0.043时,利用公式(1)模拟仿真得到的传感器反射谱如图5所示。
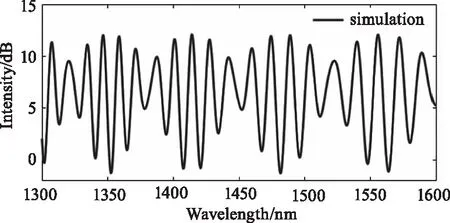
图5 模拟的传感器的反射光谱Fig.5 Simulated reflection spectra of the sensor
在理论上传感器相当于两个F-P腔的级联,一个由R1和R2构成的空气腔,在干涉中占主要地位;另一个由R2和R3构成的PVA腔,由于光在PVA腔中损耗大,产生的干涉弱。因此在分析传感器的气压灵敏度时,单独考虑空气腔的作用是能够满足要求的。当满足相位条件时,即 2φ1=(2m+1)π,得到传感器干涉谱的m阶谐振峰波谷波长为:
(3)
由于构成传感器的F-P腔是闭腔,因此当传感器周围环境气压发生变化时,PVA薄膜受压而向内部膨胀,使腔长L1变小,而腔中空气的折射率nair不变,由(3)式可得,干涉谱中波谷波长将变小。如果通过实验能够测出λm与P之间确定的变化关系曲线,就可以利用干涉谱中波谷波长的变化量解调出被测气压值。传感器的气压灵敏度能够通过下面方法进行简单估算:
(4)
由相关文献可知,气压变化引起PVA薄膜的轴向应变为[3]:
(5)
式中,E和δ分别是PVA薄膜的杨氏模量和泊松比,均为常数;L2是PVA腔的腔长。由传感器结构可知,空气腔腔长L1随外界气压的变化量为:
(6)
由(6)式与(4)式可得传感器的气压灵敏度计算公式:
(7)
2.3 传感器的反射谱
图6是传感器的反射谱,与理论模拟的反射谱基本一致。对图6进行分析,发现反射谱存在许多谐振峰,这些小的谐振峰又形成一个比较大的包络线,说明干涉仪其实是两个F-P腔共同作用的结果。可以看出不同光拍内的自由光谱范围(FSR)并不完全一致,但一般情况下FSR与腔长成反比。在后面气压与温度实验中,选择处于光纤通信波段的波谷dip 1为观测点,它的峰值波长λ1=1548 nm,峰值强度A1=-9.88 dB。图7是图6光谱图经傅里叶变换后得到的空间频谱图,观察频谱图可知,仅有3个主要频率对干涉形成较大贡献,还有2个频率也对干涉功率有少量贡献,说明参与干涉的模式主要有3个,与前面理论分析基本一致。

图6 传感器的反射谱Fig.6 Reflection spectra of the sensor
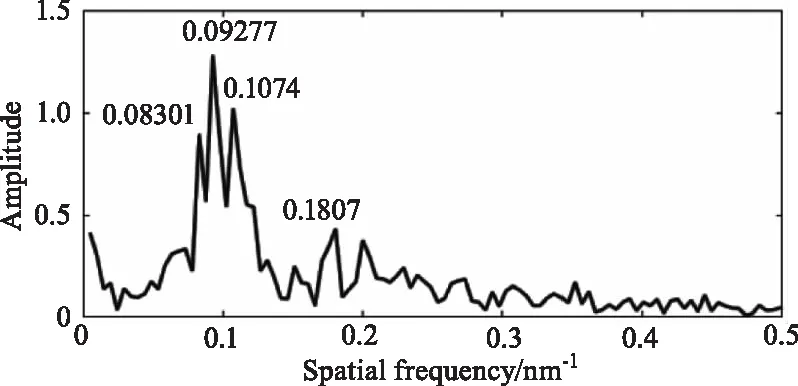
图7 传感器的空间频谱Fig.7 Spatial frequency spectrum of the sensor
3 实验结果与分析
3.1 气压实验
气压传感测量实验的装置如图8所示,包括光谱分析仪(OSA:AQ6370D),低偏振超宽带光源(BBS),光纤环形器,气泵,气压表,气室等。气室由塑料三通构成,三通的直通端经过软管接气泵与气压表,传感头通过玻璃管接在第三端口,利用密封胶把三通的各个接口都密封好构成气室。在气压测量实验前,还要对整个气路每个连接节点都用密封胶进行密封,完全干燥后,还要对这些地方进行检漏,确保实验时不漏气,以防漏气影响实验结果。气压实验在室温下进行,通过手动方式直接操作气泵,给气室线性加气压和减气压。由于传感器镀的PVA薄膜不能承受太高气压,我们选取气压P测量范围为:0~0.5 MPa,每次给气室加压0.1 MPa,在每个增压点保持15分钟气压不变,再记录光谱图,确保数据的可靠性。

图8 传感器的气压实验装置图Fig.8 Experimental setup for gas pressure measurement
图9为气压增加时传感器的光谱变化情况。从图中可以观察到,当气压P增大时,传感器的反射谱明显向短波长方向漂移(蓝移),与上节理论分析的结果一致,但谐振波长的幅值变化很小。详细考察了波谷dip 1的峰值波长λ1随P的变化情况,对测得的数据进行线性拟合,图10为拟合结果,线性度为99.52 %,说明λ1与P之间存在极好的线性变化关系。从图中可以看到,当P从0~0.5 MPa时,λ1漂移了2.4 nm,λ1变化很大,说明传感器的气压灵敏度较高。从图10拟合的直线斜率,可以得到传感器的气压灵敏度为-4.457 nm/MPa,这个值与理论计算灵敏度相近,比其他结构的光纤气压传感器灵敏度高[7-8]。当利用气泵给气室进行线性减压时,传感器也能够得到与图10相同的线性关系曲线。
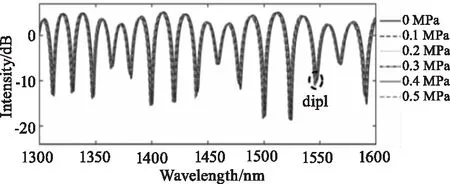
图9 传感器随气压变化的反射谱Fig.9 Reflection spectra of the sensor under different pressures

图10 波谷dip 1的中心波长与气压之间的线性拟合Fig.10 Linear fitting between the wavelength of dip 1 and pressure
3.2 温度实验
对于光纤气压传感器而言,温度串扰是必须要考虑的问题。图11为温度实验装置图。温度实验采用管式炉进行,探针放置在炉管中央稳定的温度场中,温度从40 ℃开始加热到95 ℃结束,每间隔5 ℃记录一次传感器的反射光谱。温度实验在正常大气压下进行。
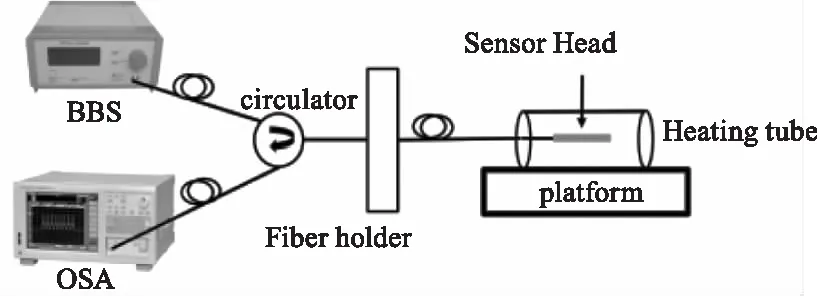
图11 传感器的温度实验装置图Fig.11 Experimental setup for temperature measurement
实验仍然选取传感器反射谱的波谷dip 1为观测点,光谱仪记录的传感器光谱变化情况如图12所示。从图中可以看到,温度在45~75 ℃阶段,波谷dip 1的峰值波长有较明显的向短波长方向漂移(蓝移);在75 ℃以后,波谷的峰值波长基本不再漂移。对图12所得数据进行分析发现,在整个变化区域内不能完全用线性函数拟合,无法找出温度与波谷dip 1峰值波长的确定变化关系,因此无法用该传感器对温度进行测量,但可以分析温度变化对气压测量的影响。在图12中对温度40~75 ℃段数据进行拟合,线性拟合度为98.62 %,得到温度灵敏度-118.8 pm/℃;而当温度升温到75 ℃以后,传感器对温度变化不再敏感。当进行降温实验时,能够得到相同的变化趋势。
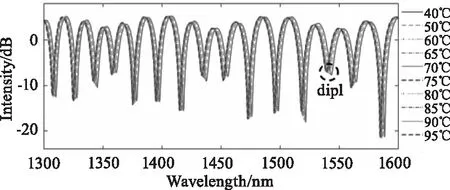
图12 传感器反射谱随温度升高的变化曲线Fig.12 Reflection spectra of the sensor under different temperatures
3.3 实验结果分析

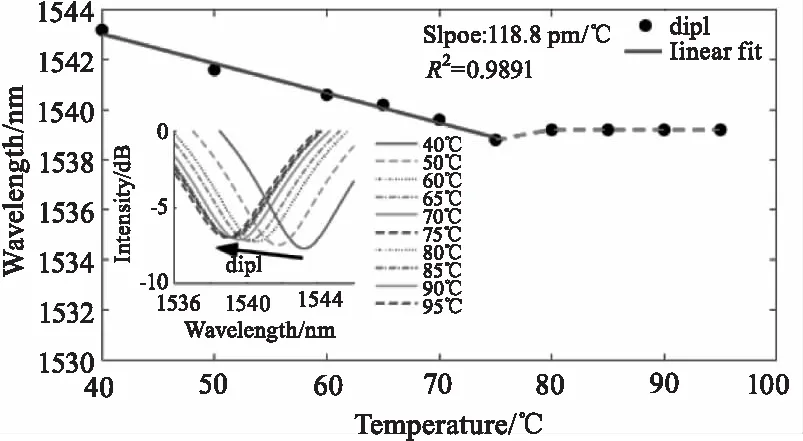
图13 波谷dip 1的峰值波长随温度升高的变化关系Fig.13 Linear fitting between the wavelength of dip 1 and temperature
4 结 论
本文提出了一种基于F-P干涉仪的高灵敏度气压探针传感器。传感头是利用毛细管与PVA薄膜构成,当外界气压变化时,PVA膜向内膨胀,改变了F-P干涉仪腔长,通过分析干涉仪的光谱变化从而实现了气压的测量。制作的传感头尺寸极小,在室温下获得了较高的气压灵敏度。在大气压下,研究了温度变化对气压测量的串扰问题,结果表明在低温时传感器存在一定的温度交叉敏感,在温度较高时传感器对温度不敏感。由于毛细石英管端面镀的PVA薄膜不能承受特别高的气压,因此设计的气压传感器测量的气压有一定范围值。总之,设计的气压探针传感器具有体积小、灵敏度高、温度串扰小等优点,在工业气压测量中有一定的应用价值。
