基于LiDAR和DOM数据的薇甘菊自动识别与分布预测
2021-12-07王瑞瑞李怡燃段芸杉陈兴旺
王瑞瑞 李怡燃 石 伟 段芸杉 陈兴旺
(1.北京林业大学林学院, 北京 100083; 2.北京林业大学精准林业北京市重点实验室, 北京 100083;3.中国科学院地理科学与资源研究所, 北京 100083)
0 引言
世界各地区间的交流日益频繁,外来物种入侵日益严重,给入侵地造成了重大的经济和生态损失[1-3]。其中,薇甘菊由于攀援能力强,生长速度惊人,破坏力大而被列入世界最具危害的热带和亚热带杂草之一[4],受到研究者们的广泛关注。
薇甘菊原产于南美洲热带地区[5],20世纪80年代传入我国南部,现已广泛分布在我国广东、广西、云南、香港等地区。为有效控制薇甘菊的蔓延和扩散,需要对薇甘菊空间分布进行识别,对其动态变化进行监控和预测。传统的监控和预测方式为人工实地调查,然而这种方式不但费时费力,时效性和精确性也得不到保证。这就需要运用遥感技术手段对薇甘菊的空间分布进行系统分析。近年来,国内外学者对薇甘菊的基因特征[6]、生物学特性[7-9]、生物防治[4,10-11]、综合防控技术[12-13]等方面进行了广泛研究,大多采用RGB波段运算[14-17]、深度卷积神经网络[18]、BP神经网络[19-20]、面向对象分割[21]等方法开展薇甘菊信息的精细提取,采用MaxEnt生态位模型[22]对薇甘菊适生区进行预测。研究区域基本位于薇甘菊入侵严重的地段,且多是盛花期薇甘菊的识别和预测。但卫星遥感数据的分辨率不足以精确识别薇甘菊,再加上卫星数据存在过境时间长和云层遮挡等问题,对小范围薇甘菊的识别和预测更是难以实现。高时空分辨率的低空遥感技术为此提供了新的研究手段[23-25]。直升机获取的机载激光雷达数据(LiDAR)和航摄多光谱数据(DOM),精度可达厘米级,且不受云层遮挡的影响,可用作薇甘菊的精确识别和预测。
本研究以直升机多光谱数据(DOM)和机载激光雷达数据(LiDAR)为基础,采用面向对象多尺度分割方法对薇甘菊爆发区域进行自动识别,并利用林场内树冠高度模型、植被盖度、坡度、坡向等数据,采用Logistic回归方法建立薇甘菊入侵分布概率的预测模型,为广州市薇甘菊大范围精确预测和管理提供数据支持和治理依据。
1 研究区概况与数据来源
1.1 研究区概况
我国南方地区深受薇甘菊入侵的危害,其中广东省尤为严重。本文选择广东省广州市增城林场作为研究区(23.292°~23.369°N,113.681°~113.815°E),总面积约为2 777.55 hm2,属于亚热带海洋性季风气候,全年温暖多雨、光热充足,年平均气温在20℃以上,年降水量约为1 720 mm,适宜植物生长。林场内植被以乔木为主,主要树种有桉树(Eucalyptus)、杉木(Cunninghamialanceolata)、湿地松(Pinuselliottii)、黎蒴(Castanopsisfissa)、马尾松(Pinusmassoniana)等。由于林场面积较大,本研究只选取其中一部分进行研究,面积为141.710 4 hm2。研究区地理位置及直升机真彩色影像如图1所示。
1.2 数据来源
研究数据采集于2019年11月18—19日,为贝尔直升机航拍影像和机载激光雷达影像,飞行高度约500 m,飞行旁向重叠度约为40%。航摄多光谱影像有红、绿、蓝3个波段,地面分辨率为0.07 m。直升机搭载的激光传感器为Galaxy Prime Sensor,具体参数如表1所示。定位定向系统包括:POS AVTMAP60 (OEM)、220信道双频GNSS接收器、带铱滤波器的GNSS机载天线和高准确度AIMU (Type 57)。航摄时天气晴朗无云,光线充足,基本无风,适合直升机航拍作业。本研究将机载激光雷达数据与直升机拍摄影像结合,可精确识别影像上薇甘菊的分布,为其预测提供高精度的数据源。
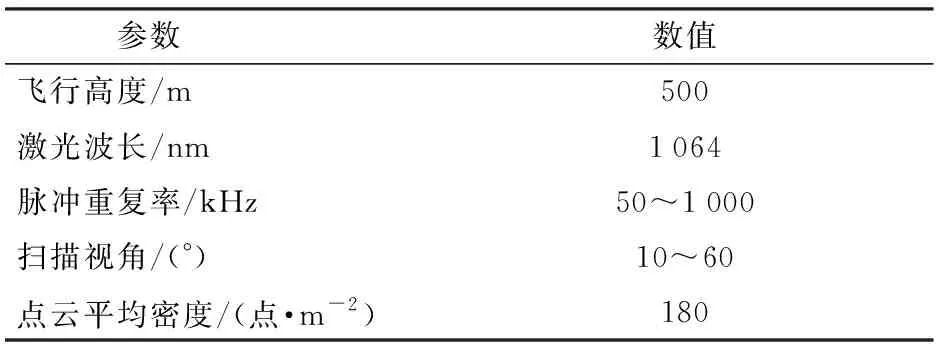
表1 传感器参数配置Tab.1 Sensor parameters configuration
2 研究方法
本研究针对目前薇甘菊在可见光下视觉辨识度低,受限于野外环境和数据提取精度较低等问题,以直升机多光谱数据和激光点云数据为基础,根据薇甘菊纹理特征、光谱和形状特征采用面向对象多尺度分割方法对其爆发区域进行自动识别;结合机载激光雷达数据和直升机航拍影像提取林区冠层高度、坡度、坡向、高程和郁闭度因子,对选取的影响因子进行相关性分析和似然比检验,剔除不符合要求的因子,利用Logistic回归方法建立研究区薇甘菊爆发自动识别范围与各因子之间的线性模型,进而得到研究区薇甘菊入侵分布概率的预测模型。研究技术路线图如图2所示。
2.1 薇甘菊爆发区域自动识别
薇甘菊生长分布集中,常连成一片出现。盛花期的薇甘菊在可见光波段内反射率显著高于其他植被[14],且薇甘菊的氮磷含量显著高于其背景植物,在影像上呈现泛白的颜色从而与其他植被区别开来[16]。未开花前的薇甘菊与其他植被的特性相差不大,蓝绿差异指数(BGDI)、绿红差异指数(GRDI)、归一化绿红指数(NGRDI)、过绿指数(EGI)、归一化过绿指数(NEGI)以及植被色素比值指数(PPR)都无法将薇甘菊和其攀附植物直接分离开,但植被色素比值指数可为面向对象的多尺度分割提供参数支持[21]。
鉴于此,本研究选取图像光谱特征中G波段上的像素平均值、亮度、植被色素比值指数和高程数据作为特征指标,借助eCognition软件选取薇甘菊分布训练样本点,查看其特征参数值分布范围,经统计得到各个特征参数的最小值和最大值,进而对薇甘菊进行识别和标识,从而确定薇甘菊分类规则集,利用面向对象的多尺度分割方法对薇甘菊爆发区域进行自动识别提取,建立薇甘菊分布识别范围。像素平均值、亮度、植被色素比值指数的计算公式为
(1)
(2)
PPR=(G-B)/(G+B)
(3)
n——像素数m——影像图层数量
CLi——第L图层上第i个像素的值,也称为图层值
PPR——植被色素比值指数
R——红波段像素值
G——绿波段像素值
B——蓝波段像素值
多尺度分割算法(Multiresolution segmentation, MRS)包含影像各图层及其权重、分割尺度和同质性准则组合参数,其中分割尺度和同质性准则组合参数最为重要[26]。本研究利用eCognition软件中的最佳分割尺度评价工具ESP2计算不同分割尺度参数下影像对象同质性局部方差(Local variance, LV)的变化率(Rates of change of LV,ROC-LV),当LV的变化率达到最大时,该点对应的分割尺度就是最佳分割尺度。由于图像信息的不同,计算得到的最优分割尺度往往有多个值,经不同分割参数组合进行对比分析,确定薇甘菊地物的最优分割尺度及其同质性准则参数。采用面向对象基于规则的分类方法从影像对象区块中提取薇甘菊爆发入侵区域,得到薇甘菊分布识别范围。
2.2 影响因子提取
参照薇甘菊入侵分布影响因子[19,27]的研究可知,地形特征以及土地利用方式是影响薇甘菊入侵分布的重要影响因子。因此,本研究选取海拔、坡度、坡向、冠层高度和郁闭度进行薇甘菊分布范围预测的研究,但由于薇甘菊不仅可以攀援于树冠上,也可以匍匐于灌丛上,本研究使用植被覆盖度(Vegetation fractional coverage,VFC)代替郁闭度。
根据原始激光点云数据和多光谱数据生成数字高程模型数据(DEM),利用ArcGIS 10.3空间分析工具生成相应的坡度、坡向;将研究区的数字表面模型和数字高程模型进行差值运算,得到冠层高度。冠层高度计算公式为
CHM=DSM-DEM
(4)
式中CHM——冠层高度
DSM——数字表面高度
DEM——数字高程
由于研究中林场的影像数据只有可见光范围内的3个波段,因此选择可见光波段差异性植被指数(VDVI)进行植被覆盖度运算,并根据像元二分法得到植被覆盖度。
VDVI=(2G-R-B)/(2G+R+B)
(5)
VFC=(VDVI-VDVIsoil)/(VDVIveg-VDVIsoil)
(6)
式中VDVIsoil——裸土或无植被覆盖像元植被指数
VDVIveg——完全被植被覆盖像元植被指数
植被覆盖度中裸土的VDVI理论上接近0,但由于VDVI会受到大气、地表粗糙程度等因素的影响,裸土的VDVI会在小范围内波动;VDVIveg则与季节、植被类型等密切相关[28],因此,植被覆盖度可表示为
VFC=(VDVI-VDVImin)/(VDVImax-VDVImin)
(7)
式中VDVImin——植被覆盖像元植被指数的最小值
VDVImax——植被覆盖像元植被指数的最大值
参照VDVImin和VDVImax取值问题的研究[29]可知,由于不可避免存在噪声,VDVImin和VDVImax一般取在置信区间[5%,95%]获得的最大值与最小值。
2.3 薇甘菊入侵概率模型创建
线性回归模型是目前定量分析研究中常用的统计分析方法,然而在许多情况下,线性回归会受到限制,特别是当因变量是一个分类变量而不是一个连续变量时。Logistic回归模型能很好地解决这一问题[30],因此,本研究利用Logistic回归方法建立研究区薇甘菊爆发自动识别范围与各因子之间的线性模型,进而得到研究区薇甘菊入侵分布概率的预测模型。在构建Logistic回归模型之前,需分析提取的因子和薇甘菊入侵分布的相关性,得到因子与薇甘菊分布的Pearson系数表,然后对符合相关性分析的因子进行似然比检验,将不满足似然比检验的因子变量剔除[31-33],剩余因子变量利用Logistic回归方法建立薇甘菊入侵概率模型,解释影响薇甘菊入侵分布的因子与薇甘菊入侵爆发之间的联系,进而预测薇甘菊入侵爆发的概率。概率计算式为
(8)
式中pi——薇甘菊入侵爆发概率
β0——常数项
βm——自变量xmi对应的回归系数
2.4 精度检验
为进一步分析薇甘菊入侵概率模型的效果,以林场提供的11月初实地调查获取的52个薇甘菊分布样区数据作为参考资料,将薇甘菊入侵概率参考图与样区数据进行对比,评价薇甘菊入侵概率模型的精度。
3 结果与分析
3.1 薇甘菊爆发区域自动识别结果及分析
参照文献[34-35],本研究设置初始分割尺度为50,逐步分割处理每次的增加步长为1,循环次数即执行分割的次数为200,形状参数和紧凑度参数设置为0.5,进行分割尺度遍历,循环结束后,生成折线图(图3)。局部方差变化率的波峰表示此时尺度为待分割地物的最佳分割尺度[36]。由于影像信息的丰富性,遍历计算得到的最优尺度通常是多个[37],本研究对得到的多个最优尺度进行对比分析确定用于薇甘菊识别的分割尺度[38]。
从图3可以看出,分割薇甘菊的最优尺度有60、76、80、100、114、135、148、168、188、201、208、217、245。当分割尺度为60、76、80时,薇甘菊被分割的较为破碎,出现了过分割现象;当分割尺度为100时,薇甘菊分割较为清晰;当分割尺度为114~201时,薇甘菊和其他植被合并越来越多,不能明确地分割出薇甘菊(图4)。因此,在形状参数和紧凑度参数都为0.5的情况下,分割尺度100是本研究薇甘菊自动识别提取的最优尺度。
利用G波段上像素的平均值、亮度、植被色素比值指数和高程特征所包含的信息并借助eCognition软件选取薇甘菊分布训练样本点,查看其特征参数值分布范围,经统计得到各个特征参数的最小值和最大值,进而对薇甘菊进行识别和标识[39-40],确定薇甘菊分类规则集:分割尺度为100,形状参数为0.5,紧凑度为0.5,高程为29~329,亮度为190~220,绿波段均值大于175,植被色素比值指数为0.15~0.25,实现薇甘菊与攀附植物的分离,得到薇甘菊爆发区域自动识别范围。虽然薇甘菊在开花季节的颜色和纹理异于其他植被,但由于其分布比较零散,与其他植被的特征较为相似,存在错分情况。本研究薇甘菊自动识别区域729处,错分区域34处,错分率为4.66%,漏检3处,漏检率为0.41%,漏检较少。错分区域主要存在于影像中的高亮区域,该部分植被大多在薇甘菊爆发点附近,可手动进行纠正,得到准确的薇甘菊自动识别结果(图5)。
3.2 影响因子提取结果及分析
本研究提取的研究区数字高程模型、数字表面模型、坡度、坡向、冠层高度模型如图6所示。利用ENVI软件统计VDVImin和VDVImax在累积概率为5%和95%时的值,并确定VDVImin和VDVImax分别为0.011 075和0.426 087,计算得到植被覆盖度(图6f)。
根据Pearson积差相关性分析得到因子与薇甘菊分布的Pearson系数(表2)。从表2可以看出,影响薇甘菊入侵分布的因子中,高程和冠层高度处于最重要位置,相关系数为负值,即表示这些因子对薇甘菊的分布具有负影响,高程和冠层高度越高则越不适合薇甘菊的入侵分布。处于第2影响位置的因子是坡度和植被覆盖度,坡度越陡,植被覆盖越密,越不适合薇甘菊的攀爬入侵。相比于高程和冠层高度,坡向对于薇甘菊入侵分布的影响不是特别大。这与薇甘菊在坡度较小、植被稀疏的低地区攀爬生长特性是一致的,表明Pearson积差相关系数的拟合效果较好,本研究选取的影响因子对薇甘菊入侵分布预测的解释性较强。
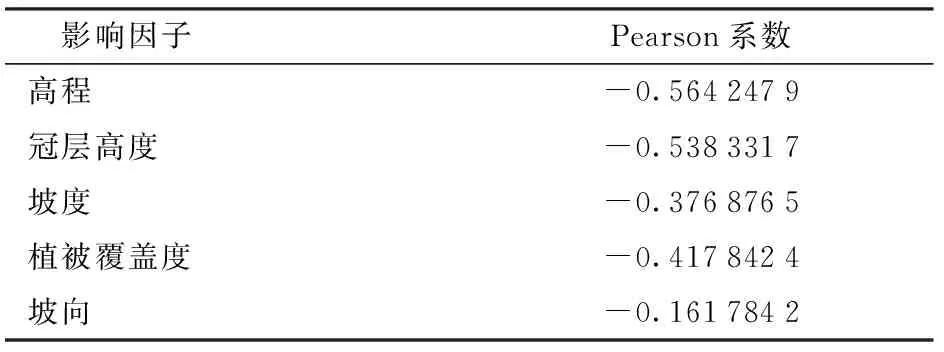
表2 Pearson系数Tab.2 Pearson coefficient
3.3 薇甘菊入侵概率预测结果与分析
根据似然比检验结果(表3)可以看出,高程、冠层高度、坡度、植被覆盖度都通过了检验,可作为变量参与建立薇甘菊分布预测模型,坡向因子没有通过似然比检验被剔除。
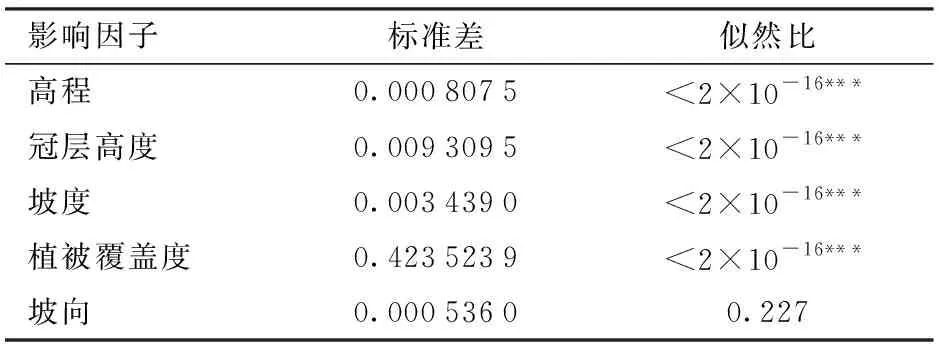
表3 似然比检验结果Tab.3 Likelihood ratio test
通过检验的冠层高度、高程、坡度、植被覆盖度因子设为变量x1、x2、x3、x4,经逐步筛选法得到薇甘菊生长分布概率p,生成薇甘菊入侵概率图(图7)。根据计算出的预测概率并结合以往的研究成果[31,41],初步判定p≥0.6为薇甘菊入侵范围,而p<0.6为非入侵区域,即图7中橘黄色区域和红色区域为薇甘菊入侵范围。薇甘菊匍匐生长,高坡度、高大密集林木区不利于薇甘菊的生长,而向阳、水分条件好的地区,比如林木边缘区、水体周边的半自然环境等区域,薇甘菊生长分布较多。从图7可以看出,薇甘菊入侵分布概率大的区域多在人类活动明显的道路两旁、低矮稀疏林木边缘和坡度低、地势平缓区域。预测结果符合薇甘菊生长扩散机制,预测效果较好。薇甘菊生长分布概率p的计算公式为
3.4 精度验证
为进一步验证本文方法对薇甘菊分布预测的效果,以林场提供的11月初的薇甘菊调查范围数据(图8)作为参考资料,将薇甘菊分布图与分布预测结果进行对比。调查结果有52个薇甘菊入侵样本区域,其中46个样本落在了薇甘菊入侵发生频率高的地区,即黄色区域内,这些样本均位于水体、林木边缘和地势低缓的向阳处,是薇甘菊生长的典型地形区域;6个样本落在蓝色区域,即薇甘菊生长的非典型地形区域,这些样本处于研究区地理位置的边缘,周围存在杂草干扰,不太容易识别。综上所述,本文方法预测薇甘菊入侵分布的准确率达88.46%,整体精度符合要求,具有较高的拟合效果。
4 结论
(1)面向对象的多尺度分割方法可以综合利用影像的多种信息用于地物识别分析,错分率为4.66%,漏检率为0.41%,漏检错分较少,总体精度较高。
(2)高程、冠层高度、坡度、植被覆盖度是研究区内影响薇甘菊入侵分布的重要因子,薇甘菊出现与否和周边的地势高度、坡度以及周围树木冠层高度显著相关。薇甘菊分布范围主要是人类活动明显的道路两旁,低矮稀疏林木边缘以及坡度低、地势平缓的区域。
(3)Logistic回归模型具有较好的预测拟合效果,准确率达88.46%,可为大范围薇甘菊自动识别和预测提供一定的理论指导,对广州市薇甘菊综合防治具有现实的指导意义。
