高速公路路面车辙三维线激光技术的应用分析
2021-12-07饶明超辛鸣
文/饶明超、辛鸣
1 前言
对于高速公路路面工程而言,在车辆长期运行之下会产生荷载,导致路面结构出现车辙问题,严重影响到车辆通行的舒适性以及安全性。由于路面车辙形成的因素较多,不仅有材料强度因素,同时也有车载因素以及环境因素。不同的影响因素产生的车载类型是存在差异性的,所以在路面车辙处理环节,就需要采用三维线激光技术对车辙的形式进行测定,以判断车辙形成的主要原因,以便按照检测结果采取有效的修补措施。
2 三维线激光检测系统的组成及工作原理
路面车辙激光检测技术有较多的细分形式,其中三维线激光检测系统较为典型。激光器可提供光源,照相机则协同运行,以确定被测路面上产生的光斑,最终完成检测[1]。激光器是重要的装置,通常以结构光激光器为主,照相机是CCD(Charge Coupled Device,电荷耦合器件)照相机。在检测环节当中,通过激光的作用能够全面地照射路面结构,使其处于待测定区域,可以按照光纤的情况进行改变,能呈现变形的情况。并且在数据处理时,可以通过软件对平整度的情况进行计算;此外CCD 系统还能全面地记录三维图像参数,在经过系统处理以后能够编程二维条纹图像,且通过光条中心线提取以后,按照信息参数值构建出车辙的变形曲线,能够快速、准确地反应出车辙的深度(图1)。
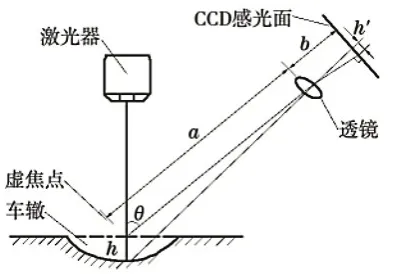
图1 深度情况分析
在图1中,a 表示激光器和路表交点的透镜距离(m);b 表示透镜到感光面(CCD)的距离(m);θ 表示路表面法线和像镜头的角度(°);h'表示位移(m),按照图1的几个关系系数,对于车辙的深度可以按照以下公式计算:

3 LMI 三维线激光检测系统
对于三维线激光检测技术而言,其主要包括检测系统以及监测设备,由于对检测技术的要求较高,因此对LMI 三维线激光检测系统内容进行以下分析。
3.1 系统组成
在公路路面车辙检测工作开展中,三维线激光检测系数属于一种全新的检测手段。该系统功能丰富,具备很强的操作性,然而采购成本相对比较高。当前在我国建设领域中应用不够广泛。但是在新时期背景下,随着技术的不断发展,LMI 公司在总结科学技术经验之下推出的三维线激光检测系统具备一定的突破性,该操作系统性能好、成本低,当前在我国建设市场中反响效果很好。LMI 三维智能传感器主要分为两种方式:Gocator2000 系列和Gocator2300。这两种检测系统的扫描费用非常高,能够在车辆行驶的状态下调节扫描功能,实现精确的数据捕捉,能够减少光照影响带来的不稳定因素,此类技术具备以下特征。
传感器功能强大,能够进行激光测量以及数据快速处理,且在确定被测物的轮廓以后,可以构建出三维坐标,能够实现独立高效运行,不需要借助其他的硬件支持;同时,该系统还配置有软件能够与传感器相对接,可快速处理数据[2]。
3.2 实际应用
以某高速公路路面车辙检测中应用三维线激光技术检测为案例进行分析,在检测工作开展中,传感器装置是非常重要的一项设备,所以需要做好相关的配置;针对检测仪器扫描频率设为700Hz,正常条件下每秒可以扫描700 个的图像数据。根据本次案例的要求,选择规格为300mm×300mm×60mm 的沥青车辙板,进行路面的测量。测量数据精度为0.1mm,主要的设备为游标卡尺,使其能够对车辙的深度进行测定,且在测定环节考虑到车辙位置对涉及平均参数进行计算,得出最终结论。从槽底的实际情况分析,其平整性较好,按照目前激光数据的要求,整理后获得平均值参数,然后计算确定车辙深度值[3]。根据试验参数结论分析,对检测设备的运行参数进行合理设计,在具体设计中曝光值与假设高度以及检测宽度参数分别为1200μs、1.4m、1400mm。
4 工程实践
4.1 工程概况
某公路项目工程全长为31km,车辆行驶速度为100km/h,宽度为24.5m。该线路工程在长时间的投入使用后出现了车辙问题以及路面脱空等问题。因此,为了全面了解路面病害问题的程度,从而按照病发机理进行处理。本项目主要以随机抽样检测的方式,对车辙的深度进行了检测,计算确定平均值,然后明确真实参数,再使用LMI 三维线激光检测系统采集确定车辙深度数据,连续采集4 次参数,得到平均值,最终可以获取最终结果。
4.2 不同速度下试验
本次研究主要是进行平整度参数的测量,得到的数据具有较高的准确性。由于城市内部交通通行量较少(通常在70km/h 以下),为了真实模拟城市道路运行实际情况,选择其中两个路段,每个路段有100m长,每个路段有10 次检测。在路段1 中检测10 次,在路段2 进行10 次检测,测得的IRI 值分析之后发现,不管是路段1 还是路段2,每次检测速度都和匀速相差不大。在路段2 中,速度是比较平均的,为55km/h,而路段1 除了第2 次行驶在27km/h 左右,其他9 次都是匀速,56km/h。从测量结果分析发现,在路段1 第2 次检测中,得到IRI 值与平均值相似,这就表示不足30km/h 速度时所得到的检测值与中高速获取的数值有很大的差距。
4.3 检测结果
在检测的过程中采取上述的方法,选择人工测量以及系统测量的方式进行,对两者的测量有效值进行比较,具体结果见表1。
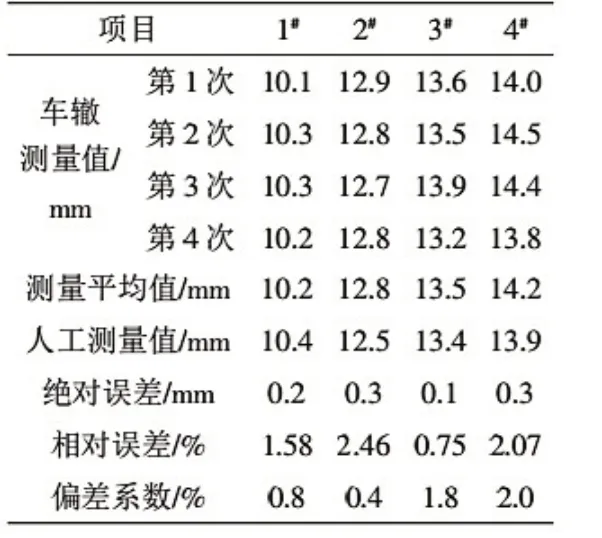
表1 车辙测量值与人工测量真实值的对比结果
从上述测量内容分析发现,经过4 次测量之后所产生的绝对误差为0.1~0.8mm,误差不会超过2%。根据检测偏差参数对比分析,符合不足5% 的标准。因此,这种情况下应用的三维激光设备运行条件良好,测量精度较高。按照获取的结果对设计的参数进行分析,在观察y 值与X 值后创建指标的线性回归方程y=1.1594x − 2.0749,而后通过方程套用可确定测量值。本次计算数据为0.9783,达到技术标准的要求。
5 三维线激光技术应用的影响因素分析
通过以上系数分析可知,比较测量值和平整度的等级是存在差异性的两者参数并不是完全重合的状态。通过对表面激光数据的稳定性和差异性分析之后,可推测出影响三维线激光技术的影响因素有色彩、构造深度等方面的影响。
5.1 色彩的影响
沥青路面结构是我国公路工程的主要形式,沥青整体颜色均以黑色为主,并且路面中还设置了白色与黄色的标线。由于存在这种特点在进行相关检测时,就会受到路面反射颜色影响导致效果变差,随着颜色变化系数的不断增加,精确性就愈发不准确。对于不同类型的颜色来说产生的影响是不同的,一般而言其具体影响大小以黑色最明显,其次是黄色,再次是白色。因而在三维激光技术应用时,需要对颜色误差引起的偏差问题进行考虑,并且针对特定工程需要进行多次检测,在平均检测数据结果基础上选择最接近的参数作为参考值。
5.2 构造深度的影响
在应用该技术时,受到材料粒径以及外界因素的影响,性能会出现一定差异,导致检测的效果不够真实。其次,在三维线激光检测技术应用时,需要综合考虑路面结构层的平整度,选择一些路段工况较好的路段作为试验路段,在此路段试验检测以后掌握相关试验参数的同时再进行整体工程的检测,如此才能保证三维线激光检测的参数满足实际需求。
6 结语
沥青路面经过长期运营后,极易产生车辙的问题,导致安全性事故的发生。本文以实际案例分析确定三维线激光检测技术的应用,数据精度很高且操作非常方便,可以促进总体应用效果的提升,准确地掌握车辙的情况,为沥青路面的质量管理水平的提升起到积极的作用。
