农用无人车环境感知技术发展现状及趋势分析*
2021-12-06王宝梁沈文龙张宝玉
王宝梁,沈文龙,张宝玉
(1.江苏电子信息职业学院,江苏淮安,223003;2.江苏食品药品职业技术学院,江苏淮安,223003)
0 引言
伴随着我国人口老龄化程度加剧,城镇化的高速发展,农村人口的不断流失,导致传统农业的发展面临劳动成本高等诸多问题。为解决目前农业生产所面临的难题,国内外很多高校和研究机构近年来专注于农用无人车的研发工作,共同促进农业自动化、智能化。
近年来,快速发展的智能控制技术和信息化技术使得农用无人车应用于农业生产实践中。在农业生产中,农用无人车的应用场景很多,基本上可以逐步取代人工操作,能够覆盖农业生产全过程,如播种、施肥、对农作物长势和病虫害进行持续高效的监测喷洒农药以及收割等。随着农用无人车技术逐步成熟,将从根本上解放劳动力,提升农业生产效率。
本文在总结国内外农用无人车发展现状的基础上,重点对农用无人车的环境感知这一关键技术进行阐述,同时通过对不同的传感器技术特点进行分析对比、应用进展情况进行总结,同时分析目前主要应用的传感器组合方式的优缺点,最后指出农用无人车环境感知技术的研究和应用的发展趋势。
1 农用无人车
随着科学技术的不断进步和农业装备的日益现代化,使农业机械的无人驾驶成为可能;而要实现农业机械的无人驾驶,重点在其自我感知技术的研究。
无人车对环境的感知能力,对其自主机动能力非常重要。由于环境的复杂多变和地图数据的不准确,不能只依靠单一的导航方法(如GPS)。农业无人车辆必须能利用车载传感器的数据来规划和跟踪一条路径,穿过农田,必要时能够感知并避开障碍,这样才能不致碾压稻田或其他作物。
感知技术的目标是将传感器信息中的特征与现实世界的特征联系在一起,这要对车辆的实时控制、规划和再规划是足够了解的。但是最大的不确定性在于对无人车辆性能的描述和确定感知(或其他子系统)对无人车辆系统性能的影响。
目前用于大型农业作业的农用无人车大基本上以传统的拖拉机为本体,在此基础上进行改装,比如洛阳一拖在的东方红LF954-C无人驾驶拖拉机[1],如图1所示。东方红LF954-C无人驾驶拖拉机配备“国Ⅲ”发动机、动力换向变速箱及电控悬挂系统。信息和控制系统包括北斗自动转向系统、整车控制系统、雷达及视觉测量系统、远程视频传输系统、监测系统以及远程遥控系统等,该机能够实现农田耕、整、植保等功能。

图1 LF954-C无人驾驶拖拉机Fig.1 LF954-C unmanned tractor
2020年,R150农业无人车实现全球量产[2],如图2所示。他采用了1 000 Nm高扭矩双无刷减速电机;最大爬坡角度可达30°,能实现全地形越野;采用模块化设计;可以快速换装轮组,也可以调节车身离地间隙;借助RTK精准导航,R150农业无人车可以达到厘米级行驶精度,能在田间地头实现自动驾驶;AI行车控制,可做到智能预判路况,在行驶过程中更加平稳安全。R150能够实现精准植保、农资运输、自动巡田、高效播撒、防疫消杀等多种功能,大大避免了越来越少的劳动力问题,减少了生产成本,提高农业生产率,实现无人化农业模式,颠覆传统农业生产方式。

图2 R150农业无人车Fig.2 R150 agricultural unmanned vehicle
2 环境感知技术
农用无人车的作业环境属于非结构化环境,路径规划是农用无人车进行高可靠度、响应及时、大面积作业的基础。根据不同的农作物以及对应的农田范围进行整个农作物区域的路径规划,在路径规划过程中,环境感知技术是其中关键的技术之一。
目前主流的农用无人车常用的环境感知方式有基于激光雷达环境感知技术、基于机器视觉环境感知技术和GNSS技术三种。
2.1 基于激光雷达环境感知技术
激光雷达以精确的时间分辨率、精准的空间分辨率、超远的探测距离等特点成为先进的传感器,这是传统雷达远远赶不上的。激光雷达已经在民用、军用领域开始普遍使用,前景广阔。因此农用无人车也应用激光雷达进行农田环境的检测。农用无人车主要通过激光雷达扫描得到环境特征点云数据分布情况,分析获取外界环境。
由于农业生产环境具有非结构化、实时变化的特殊性,因此常采用激光雷达作为农用无人车探测方式,用来确定农用无人车与作物之间的位置关系。激光雷达环境感知技术路线如图3所示。所以对原始数据需要进行预处理操作,通常包括滤波、去噪等,这样能够获得较为准确的信息数据,并按照一定的规则将数据分类成点云数据,通过这些数据能有效获得导航信息。通过对于应用激光雷达进行环境感知技术的研究分析,总结起来目前主要有三种方法,并且这些方法在各领域中获得了广泛的应用。

图3 激光雷达环境感知技术路线Fig.3 Technology route of lidar environment perception
激光雷达技术目前主要用于作物行路径提取、障碍物检测和作物状态检测等功能。
用于作物行信息获取。周俊等[3]通过激光雷达获取果树树干中心点,不同的是,这些数据会与之前的数据信息进行匹配,根据这一结果对机器人相对果树的位置进行调整,从而达到机器人的准确定位。但是仅用二维激光传感器对树木进行检测,却无法识别非树干对象。张凯良等[4]设计了一套环境感知系统,主要应用激光雷达传感器、陀螺转角仪等实现玉米收获机的定位与自主行走。图4所示为横向偏差-1.325 m、航向偏角0.30°和横向偏差0.825 m、航向偏角-3.71°的试验检测结果。

图4 激光雷达静态检测横向偏差试验结果Fig.4 Lateral deviation under static test by laser radar
用于障碍物检测。最初二维激光经常被应用于障碍物检测以及路径规划,很多研究者在这一方面做了很多工作并取得了很多成果。PENG Y[5],肖宇峰等[6]分别使用二维激光传感器在农田中获取障碍物信息,用于障碍检测并进行路径规划。李艳等[7]提出一种将激光雷达和深度相机信息融合的同步定位与建图(SLAM)方法,首先利用扩展卡尔曼滤波器将移动机器人的深度视觉信息与激光雷达信息相融合,再利用贝叶斯估计的方法将深度相机与激光雷达分别生成的地图进行二次融合,并在构建地图时采用基于图优化的地图构建算法,充分利用多传感器对于目标的冗余信息,提取目标的一致性描述信息,提高构建地图的准确性。在实际环境中,通过机器人平台进行实验,验证了该方法的可靠性,实验表明通过多传感器信息融合构建的地图更接近于实际环境。袁红斌等[8]基于激光测距雷达和机器视觉车载相机,对智能车道路的障碍物检测进行研究。通过分析,选用激光雷达及CMOS车载相机,标定了雷达和相机,为改进低照度环境下提取图像存在的缺陷,制定了Retinex算法来增强低照度图像。因两种传感器频率不同,结合D-S证据理论,将车载相机和激光雷达数据进行融合,对真实环境中的行人和车辆信息进行准确识别,融合相关数据后可以发现,与单一传感器相比,该系统检测的概率更高。
用于作物状态检测研究。张漫等[9]使用VLP-16型三维激光雷达采集田间玉米点云数据,对获取的玉米点云数据进行分析处理,确定精确率和召回率最优组合。蔡吉晨[10]基于二维激光雷达探测技术提出了果树冠层在线探测方法,并分别进行了规则物体及果树冠层的网格体积在线探测试验,测试验结果显示有较高的探测精度。

表1 激光雷达传感器对比Tab.1 Comparison of lidar sensors
为实现农用无人车的自动导航,通常使用激光雷达作为传感器,初期应用二维激光雷达传感器较多,主要由于二维雷达传感器成本低,获取数据少,对硬件和算法要求低,对较大的作物检测效果好,但是存在扫描范围窄,对于作物的结构化程度要求较高;随着技术发发展,三维激光雷达越来越多被用作农用无人车导航的传感器,三维激光雷达传感器虽然成本较高,但是能够获取更多详细的数据信息,对于农田环境的适应性较强。
2.2 基于机器视觉环境感知技术
机器视觉越来越多的应用于农用无人车中。机器视觉技术可以分为一维成像视觉技术、二维成像视觉技术和三维成像视觉技术[11]。根据使用的摄像头数量可分为单目视觉技术、双目视觉技术和多目视觉技术[12]。机器视觉技术主要用于农用无人车导航的路径识别和作业对象识别等方面。
基于机器视觉环境感知技术主要应用在环境各异的多垄行农田作物中心路径的识别和作业对象的识别。目前,路径识别主要通过如图5所示流程实现。
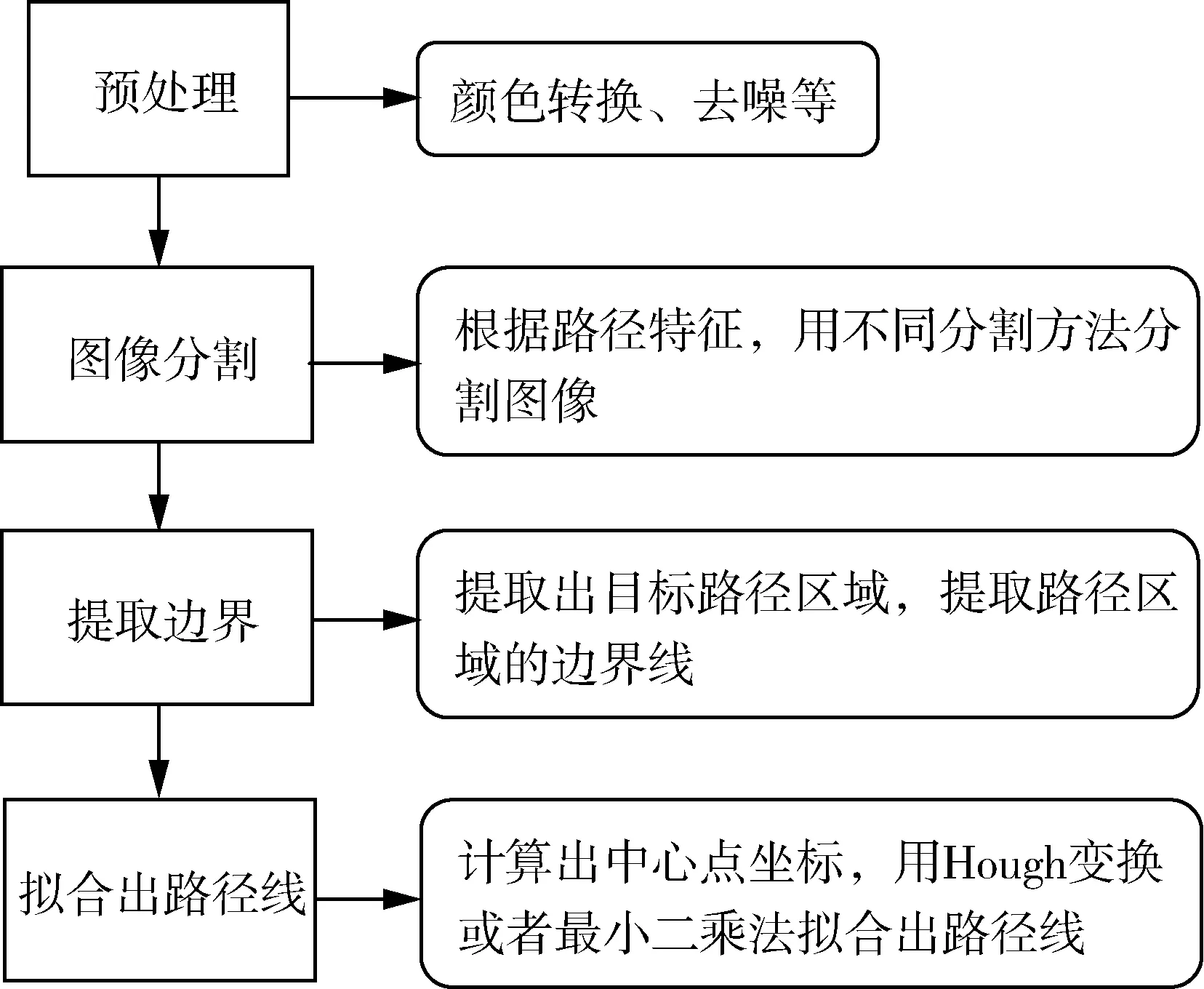
图5 路径识别流程Fig.5 Path identification process
2.2.1 路径识别
Ollis等[13]采用Hough变换拟合作物行直线[14-16];Benson等[17]编写算法进行作物行直线的提取以此作为机器的自主行走引导线,并分别进行了室内模拟实验和田间试验。Gee等[18]应用Hough变换的统计特性获取作物行峰值位置信息,获取导航线。
针对图像处理算法的研究,深度分析图像信息,获取行作物连续情况下的路径。Han等[19]使用K-means聚类算法分割图像,能够有效提高导航精度,但是由于算法复杂,运行速度慢,导致响应不及时,实时性不好。Tillett等[20]基于统计原理,将作物图像分割成图像条,通过计算图像条像素点的平均值确定中心点坐标,将中心点拟合直线,作为引导线,这一算法受环境变化影响较大,尤其是光强变化较大时,会造成很大的误差。Choi等[21]提出一种针对水稻作物导引线的提取算法,主要利用水稻特有的形态特征来进行识别水稻植株的中心坐标,精度较高,但是同样存在算法运算时长、响应慢的问题。
针对存在缺苗、杂草等异常情况下的行作物路径的研究。Suriyakoon S等[22]提出在视角与田地不平或者作物确实情况下实现机器人自主性走的方法。Ji等[23]同样基于统计原理,采用模板匹配的方法,提取到作物行引导线,这一方法能够有效去除杂草等的影响。
针对不同种类的作物行检测方法的研究。Wera等[24]提出一种新的作物行检测算法,这一算法的主要优点在于能够获取作物不同阶段的行检测,该算法能够对转角、侧向偏移量等进行预测,试验证明,该算法可以准确、可靠的检测出不同作物不同阶段的行中心线。Radcliffe等[25]研发的机器视觉系统能够根据树冠和天空背景提取树冠特征点,然后将这些特征点进行拟合得到果树的作物行引导线。
关卓怀等[26]采取多段三次β样条曲线拟合法方法获取水稻待收获区域边界线,应用采用水平扫描法,提取水稻作物线拟合关键点的横坐标。并在顺光、逆光、强光、弱光4种光线环境下,在田间进行试验,对比了不同光线下的路径提取结果。强光环境下平均像素误差最小,为26.2像素,弱光环境下平均距离误差最小,为23.9 mm,强光环境下平均相对误差最小,顺光环境下稳定性最好,标准差为6.8像素。王侨等[27]在非结构化复杂农田作业环境中,依据获取图像的像素灰度级不同,通过建立正负偏差度量、图像划分子区域并获取各子区域的灰度值分布,确定特征点的坐标,最后将这些特征点进行拟合,获取非结构化田地两头的延伸线,实现农机在地头处的自主导航转弯。试验结果表明,判断地头出现的准确率不低于96%,地头边界线检测准确率不低于92%。
2.2.2 作业对象识别
作业对象识别主要是通过对获取图像处理,识别障碍物、作业对象。
针对障碍物检测。单目机器视觉由于其算法简单、与其他软硬件融合好,因此很多研究机构和高校都进行过相关工作。周俊等[28]利用单目机器视觉系统,解决了机器人自身与障碍物运动时的出现的重叠问题。Hosseinpoor等[29]通过采用双目立体视觉对障碍物进行了识别。针对作业对象检测。主要应用于果实、杂草的识别,通过对检测对象的特征分析,实现对作业对象的识别和定位。
Chiu等[30-33],Hayashi、Yaguchi、Kondo等[34-37]都应用机器视觉对番茄进行识别和定位。前者通过单个相机位置移动实现,而后者通过双目视觉系统实现。Yasukawa等[38]同样是研究对成熟番茄的识别与定位,采用多信息融合技术。冯青春等[39-40]提出一种激光主动测量方法。通过分析摄像机采集图像的颜色特征,采用R-G颜色模型来增强目标水果与背景的差异。根据列像素灰度统计,从R-G图像中选择水果串的候选区域。然后使用Cognex VisionPro图像处理类库中的CogpAlignTool对水果进行分类。试验表明,果粒识别的平均准确率为83.5%。
机器视觉技术在很多领域尤其工业领域得到广泛应用,主要优点是成本低和工业环境可控,在农业领域,主要由于农田环境的不可控性,主要体现在研发过程中环境容易受天气等因素影响,因而机器视觉技术在导航、目标识别定位方面仍存在问题:算法的检测效果因光照不同而异。形态相似的作物、障碍物等难以准确可靠的快速确定,且准确性随速度增加而降低,从而效率低,无法满足作业需求。
2.3 GNSS技术
GPS定位技术因其具有精度高、速度快、无需通视、操作简便、全球布网、全天候作业、三维坐标定位、精确授时测速等特点在车辆导航、大地测量、精细农业、资源调查等技术领域获得广泛应用。随着差分GPS定位技术的不断发展GPS定位精度不断提高RTK-GPS的定位精度甚至可达厘米级。各GPS制造商顺应这种发展趋势,推出了多种廉价差分GPS芯片或者模块使各种GPS技术集成应用更加便利。不同的GPS技术应用领域或系统对GPS定位精度有不同的要求.因此,GPS定位精度成为各类相关应用行业关注的焦点。
近年来,国内外对于农用车辆路径跟踪控制技术进行了大量研究,主要采用GPS技术与惯性导航技术相结合的方法。
GNSS导航应用广泛且技术成熟,在开阔环境如谷物类露天农场中应用效果非常好,但在封闭环境中如果树枝叶繁茂的果园内,GNSS信号容易被遮挡,从而出现定位不准的问题。
基于载波相位差分技术(RTK,Real Time Kinematic)大大提升位置测量的精度,可以实现厘米级定位精度,并且对自然环境的适应能力非常强。因此通常应用于环境复杂、作物浓度较密的农田,利用RTK-GPS技术实现农用无人车的高精度定位导航策略。
目前,DGPS和RTK技术也应用在越来越多的领域中。吴宝山[41]应用北斗/GPS双模差分技术实现了播种机的精确定位。Roberson等[42]应用RTK-GPS的自动导航系统实现了花生收获机器的精确定位,能够实现对挖出来的花生所在行进行精确定位,从而有效降低花生的损伤率。为解决插秧机的准确定位问题,石绍军[43]采用组合定位系统解决了这一问题,可实现高达5 mm的精度。该系统的主要组成如图6所示。

图6 组合导航系统示意图Fig.6 Integrated navigation system diagram
北海道大学开发一种RTK-GPS与IMU结合的拖拉机导航系统[44],如图7所示,在执行各种农业作业过程中,当拖拉机速度为3 m/s时,直线、曲线路径的跟踪误差均小于5 cm。

图7 北海道大学RTK设置图Fig.7 Dedicated RTK set up in Hokkaido University
表2所示为上述三种常用的农业机械环境感知传感器性能对比,五角星数量从5至1代表传感器在此方面的性能表现分别是优、良、中、差、很差。

表2 常用农业机械环境感知传感器性能对比Tab.2 Performance comparison of common agricultural machinery environment sensing sensors
每个单一的环境感知传感器都有其自身及其环境所带来的优缺点,例如机器视觉传感器成本低,对于物体探测方面性能优异,但是受自然环境的影响比较大,激光雷达精度高,自然环境对其影响较小,但是成本较高,难以普及。因此普遍采用传感器组合、信息融合方式进行环境感知。
3 技术现状与发展趋势
农用无人车环境感知所使用的传感器由最初单一的阶段发展到如今多传感器融合的阶段,采用多传感器信息融合的方式可以全方位获取信息并作出精准预判,可有效避免潜在的安全威胁,提高系统安全性。目前在农业生产中,需要根据农业具体的生产环境特点采取有效的环境感知方案。
3.1 多传感器融合技术
3.1.1 定位方式
全球定位系统,激光定位,超声波定位等是目前常使用的定位技术,这些技术适用于视野空旷的环境。视觉定位技术优点是能利用视觉信息实现对动态目标的跟踪和预测,重构环境模型,规划轨迹等功能,可以弥补全球定位系统、激光定位、超声波定位等技术的缺点,因而视觉定位技术有着广泛的应用。除了自动驾驶和无人机可以通过视觉定位提高整个系统的可靠性外,视觉定位技术也逐渐应用于智能机器人室内定位、环境感知和行为控制领域。
通过对国内外对于GNSS导航技术的理论研究和应用实践的情况可以看出,众多学者放弃单一方式的导航方案,通过根据不同传感器优势互补,从而提高农业导航系统的精度,开发出了高精度农业导航系统如GNSS与机器视觉的结合、GNSS与GIS的结合、GNSS与激光雷达的结合、GNSS与超声传感器的结合等。赵腾[45]提出了一种作物边缘线辅助识别方法,这一方法优先使用激光测量,只有当激光识别精度低的情况下,机器视觉识别才发挥作用,共同提高边缘的识别精度,因此这一方法是以激光测量为主,机器视觉为辅,两者相互结合。
随着技术的发展和研究的深入,大量的研究证明将RTK-GPS与其他模块相结合进行组合导航的精度高、稳定性好,适用于农业机械的无人驾驶;陈枭华[46]设计一套基于GPS/INS/WSN的组合定位系统,并通过仿真和测试验证了组合定位系统的定位精度。Ospina等[47]将惯性测量单元(IMU)和RTK-GPS相结合评估车身的侧滑角;Ball等[48]选用价格较低但精度也相对较低的RTK-GPS,结合机器视觉系统设计了能够自主行走并有效避开障碍物的农用无人车。
我国农业领域目前使用的基于RTK技术的定位系统存在局限性:一是所使用的模块中大部分定位信息不是采用GPS+北斗双模模式;二是完全从国外采购,成本高,定位精度低,损坏后维修困难。最后,目前用于室外试验的系统大多仅仅靠卫星信息进行导航,这种导航系统导航精度等很难满足实际需求,而对惯性导航或机器视觉组合系统的研究还处于理论阶段或计算机仿真阶段。
3.1.2 避障和识别
在避障和对象识别上,越来越多的采用多传感器融合技术,这一技术是指两个或两个以上的单个传感器的检测技术相结合,然后将其应用到系统中,这样可以充分利用不同传感器的优势:例如,视觉技术和激光雷达技术的结合,视觉技术检测距离短,但是激光雷达检测距离远,激光雷达难以检测颜色等信息,视觉技术却可以有效检测;而且这两者的结合相对于使用3D激光雷达技术来说,成本大大缩减。虽然近年来,多传感器融合技术在农用无人车上的研究已经取得进展,但仍有许多问题需要解决,而且这些研究仍在初始阶段或室内模拟试验阶段,距离时间生产应用存在着产品成本、系统稳定等重大问题。目前,机器视觉仍然是障碍物检测的主要传感器,研究重点是利用图像处理技术识别复杂背景下的各种典型障碍物。
3.2 发展趋势
精细农业是我国农业的发展趋势,主要目的是依据田间不同区域的差异性实现作物生产最优化。精细农业的核心思想是用全球定位系统、遥感技术获取农田小区作物信息和影响作物产量的环境因素的空间差异性信息做出针对性的调控措施,提高作物的产量和质量,同时提高田间作业的工作效率。
农用无人车的环境感知技术的发展与应用同样遵循精细化的发展方向,对于不同区域,所采用的技术方案不同,如北方平原地区和西南、西北等梯田较多的地区;对于不同作物、不同特征的作物,如稀疏性行特征的果园和密集性垄行特征的小麦,同样应采取不同的技术方案。
针对各项环境感知传感器的缺点,或许可采用如下方式,以期解决农用无人车的环境感知问题。
1)传感器的优化完善。通过合理的方式弥补不同的环境感知传感器的缺点。如可以通过传感器获取光线强度,从而调用相应的算法进行应用;随着技术发展,激光雷达的制造成本可能会有所降低,适用于越来越多的农用无人车;随着社会经济和结构的发展,RTK-GPS的使用成本可能越来越容易被接受。
2)多传感器的高效融合。多传感器融合用来感知外界环境这一方式成为近些年来研究热点,通过优化传感器配置,博采众长,实现更可靠的功能。不同传感器的组合容易做到,但是能够让信息进行有效融合还有一定难度,距离落地应用还需要进一步深入研究、实践,多传感器的有机、高效融合上还需要进一步深入研究。
3)农业生产环境结构化。农用无人车很难适应传统农业的生产环境,农田等大多处于基本的自然状态,因此可以尝试对农业生产环境进行结构化改变,这样不仅能够提高生产效率,而且降低农用无人车的生产成本,有利于农用无人车的落地使用。
此外,系统的开放性和可拓展性很可能是发展趋势,例如在环境感知技术层,可以预留多种接口,后期可进行功能拓展,实现一机多用,有效降低成本,提高农用无人车的使用效率,更有利于农用无人车的广泛应用和普及。
4 结论
科学技术的日新月异,农用无人车的出现及应用对于农业的发展意义重大,而环境感知技术是农用无人车走向田间作业的关键技术。不同类型的传感器有不同的特点,而农业环境具有复杂多变性,因此应该充分利用不同传感器的特点,研究多传感器融合的环境感知系统,从而提高系统的稳定性和可靠性,用于复杂多变的农业环境。在研究环境感知技术的同时,精细农业的核心思想同样有助于技术与应用的有效融合,研究基于农业物联网技术的导航作业远程监控平台,实现农业机械作业的可视化、远程管理和任务调度,早日实现农业装备的智能化和自动化,实现农业机械的大规模应用,提高农业装备的智能化与作业效率。
