基于医院智能配送机器人的自主充电控制系统
2021-12-05李斌赖志林王淼
李斌 赖志林 王淼
一 引言
智慧医院是医院发展的新阶段,也是近年来各大医院转型升级的重要途径。随着社会需求地快速增长,以及机器人的广泛应用,智慧物流系统作为智慧医院的重要组成部分,其智慧化程序成为衡量智慧医院的重要指标。
一台机器人是否可以在室内无人干扰的情况下不间断工作,是衡量一台机器自动化的标准,这个问题需要解决自定位、路径规划和目标识别提取精准对接以及国内外采用直接接触的机械结构,如红外引导充电需要多次调整机器人的角度才能准确的找到充电站的位置造成耗费时间长,效率低等问题。机器人自动充电主要解决定位识别及对接方式等问题。定位识别方面,国内外主要技术有视觉识别提取、激光特征点识别、RFID 识别、磁导航定位、红外信号衰减及频谱不同的方式定位、wifi 定位等。对接方式国内外采用直接接触的机械结构或無接触电磁感应充电等方式。
整体技术而言,室内移动机器人关键技术在国内仍需要深入探讨。同时自定位技术及算法复杂程度仍是目前研究的热点,视觉及人工智能等方面新概念的引入,将会为移动机器人技术带来更新鲜的血液。
二 设计需求
(一)实时监测电压
能够实时监测电源电压并反馈和显示剩余电量。
(二)自动识别与精准对接充电桩
机器人能依据激光雷达测量得到的距离信息来识别充电桩的具体位姿,然后调整机器人自身相对充电桩的位置和角度,进行精准对接。
(三)稳定性要求
要求自动充电系统平稳运行,具有一定的容错能力,保障系统安全运行。
(四)实时性要求
运行过程中要求系统能实时监控电压状态,保证充电在安全可控的情况下进行,故需要系统具有较好的实时性。
三 总体设计
机器人能够自主规划轨迹运动,以完成实际的搬运作业任务,可以实现医院内的物流传送(如药品,检验样品、餐食、手术器包、衣物、污物等),载重量设计为 200KG,可以为多名病人传送货物,并设置了生物识别(指纹、人脸)等安全性保证措施,由专有人员才可以打开。其自主导航为激光导航技术,实现自主规划路径,实时避障。通过无线模块可实现与电梯及电动门通信,完成上下电梯及过门等跨楼层工作。
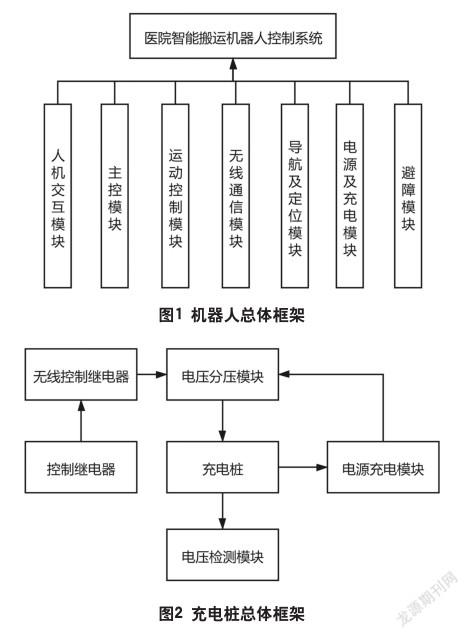
医院智能搬运机器人控制系统框图如图1所示,主要包括:人机交互模块、主控模块、运动控制模块、无线通信模块、导航及定位模块、电源及充电模块、避障模块等。
电源及充电模块是整个系统动力的来源,为各个模块提供能量。在设计过程中,由于各个模块对电源电压的要求不一致,因此需要把电源分为不同的等级来对系统供电,从而满足不同模块的需求。为了电池可以长时间使用,避免过度放电损伤电池,需要加上电压监测电路,用来监测电池电压,保证电池电压在基准值之上。其总体框架如图2所示,主要包括:无线控制继电器、控制继电器、电压分压模块、电源充电模块、电压检测模块等。
四 硬件设计
机器人需求在电压低于某值时,触发机器人充电,因此需要配套电压监测模块,机器人在未入充电站时充电站需要处于无电状态,上充电站时需要有触发使得充电站供电,左下端电压检测模块可以实时监测机器人电池电压,图3为自主充电配套机械结构,图4为PC控制模块,可以控制其自身的继电器吸合中间无线控制继电器的控制开关,而无线继电器则放入充电站内,当机器人本体通过控制继电器吸合无线继电器开关时,继电器吸合,通过右端的电源充电模块为充电站内部铜片供电,机器人本体通过对接结构的充电探针与铜片接触,完成充电过程。通过串口编辑自动充电检测节点,其模块连接图如图四所示,实际中将模块电压检测端连接于机器人充电电池端,通过实际电压表测量可以测得充电后电池电压逐步提升,可直接监测其电压。

电压检测摸块可检测 0-30V 直流电压,控制继电器供电电压为5V即可,这两部分电器元器件与无线控制继电器发射端将安装于机器人本体内。
通过串口编辑自动充电检测节点,其模块连接图如图4所示,实际中将模块电压检测端连接于机器人充电电池端,通过实际电压表测量可以测得充电后电池电压逐步提升,可直接监测其电压。

五 软件设计
充电策略流程为;机器人本体在接到自充电信息后到指定导航位置以及接收激光数据探测到的数据点,在对激光数据稳定多次提取、均值及中值滤波后的基础上,计算数据点,将机器人本体坐标变换为航向角及坐标点,判断充电站位姿;先朝着横向移动到已经铺好的磁条,再调整方向沿着纵向移动,通过激光重新定位,如果横向误差仍大于某设定权值,则重复之前动作,当横向误差小于设定权值后,则调整机器人自身角度,角度小于设定权值后,然后控制电机速度、角速度,不断匹配机器人自身位置,完成定位,逐步使其行驶进充电站,机器人驶入充电站状态。最后通过无线触发模块,触发充电。如果充电不成功,则退回一米处,重新运行程序,再对接。
由于机器人与充电站之间有角度误差和横向误差,故需要机械结构具有可横向弥补和角度弥补的能力,具体为以下几点:
1、对接方块在旋转角度内不能与支架产生干涉;
2、探针接触点的距离及对接方块在最大旋转角度时需要确保机器人对接成功率,充电站需有充足的接触距离;
3、整体尺寸需要适合安装在现有平台上,同时不影响激光采集。
六 结果分析
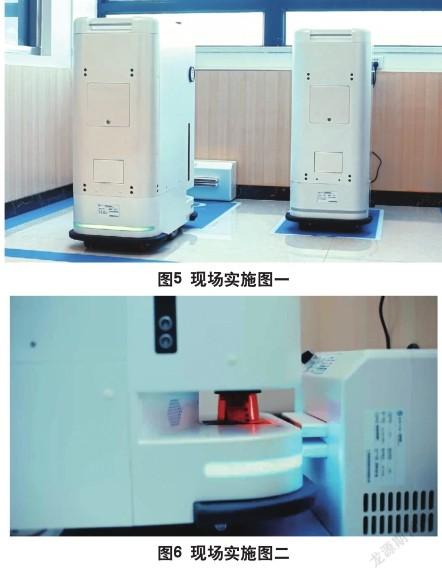
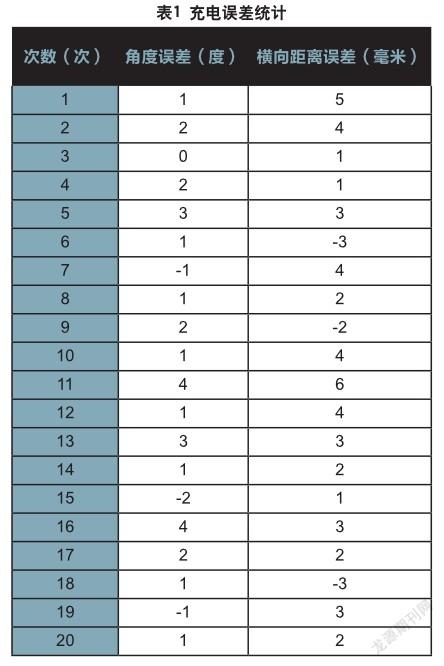
为了检测自动充电软硬件可行性,故专门设定相关测试实验,实验数据如下表1所示,机器人分别从各个区域接收调度系统的充电命令后,自动进入充电区,20组实验,成功20次,且误差距离小于6mm,自动充电率100%,图5图6分别为现场实施图。

结合机器人在广州医科大学附属第五医院的实际运用情况,如表2所示,选取从2019年03月01日开始,至2020年10月28日的运行数据,机器人总运行607天,年使用率为98.36%,总里程数达3093110.51m,总充电次数为2707次,故障3次,充电成功率为99.90%。
七 结语
本文提出了医院配送机器人自主充电系统,通过实践与实测的高成功率可以得出该系统具有较高的可行性,该系统的优势在于:寻找充电站耗时少,效率高;设计自动充电软件及机械配套结构,使现有平台可以以较高成功率实现自动充电;通过激光来完成特征点提取的方式实现机器人精准对接技术。