基于临床使用工况的磁共振(MR)可靠性指标与实现研究
2021-12-05贾东方贺飞金玮张尉强刘义红邹金林
【作 者】贾东方,贺飞,金玮,张尉强,刘义红,邹金林
1 上海联影医疗科技股份有限公司,上海市,201800
2 上海市医疗器械检验研究院,上海市,201318
3 上海交通大学附属第六人民医院,上海市,200233
4 然因普电子科技有限公司,广州市,510610
0 引言
磁共振成像是一种较新的医学成像技术,国际上从1982年才正式应用于临床。在近四十年的时间里,磁共振成像技术获得了长足的发展,已与X线成像、超声成像、核医学成像并列构成影像学四大检查手段。
我国是一个人口大国,现阶段仍然存在MR设备资源紧缺的状况。尤其在很多三甲医院,MR扫描几乎都需要提前预约,这意味着MR设备的扫描任务负荷较重,因此,在用设备的临床使用情况对产品设计和开发有十分重要的现实意义。
1 MR基本概况
磁共振成像的本质是利用人体内氢原子核的磁共振效应,因此对于脑、脊椎、腰椎、关节等含水量高的组织成像效果较好。它采用静磁场和射频磁场进行人体组织成像,在成像过程中,既不产生电离辐射,也不用造影剂就可获得较其他医学成像设备更高对比度的高清图像。磁共振成像对软组织分辨能力高、无辐射损伤的优势使其在婴幼儿发育和骨骼韧带劳损等方面获得了无可替代的应用。伴随近年来中国经济的高速发展,人民生活水平的提高,磁共振成像的应用更加广泛。
MR系统由磁体、谱仪、梯度、射频、检查床、计算机和图像显示等子系统或部件组成,涉及机械、电子、电气、射频、低温超导、材料、算法物理等多个学科,因此,MR系统可靠性指标的实现极其复杂。那么,MR系统可靠性指标的实现需要一整套系统性设计方法。结合MR系统特点,本研究提出MR临床使用分布与分析、MR系统可靠性指标确定、MR系统可靠性分配、MR部件可靠性指标实现、MR系统可靠性预计和验证一整套的可靠性与系统工程应用方法,进而实现MR系统可靠性指标的实现。图1给出了MR系统可靠性指标实现的基本框图。
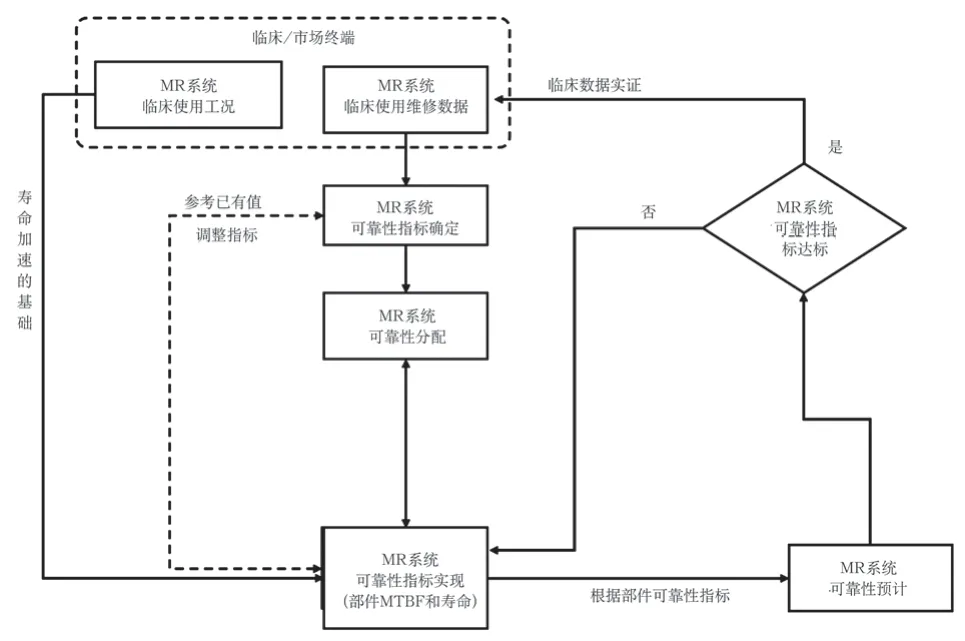
图1 MR系统可靠性指标实现基本框架Fig.1 Basic diagram of reliability index realization of MR system
2 MR临床使用分布与分析
MR临床使用数据与医院的扫描通量密切相关,考虑到全国医疗资源分布情况,本研究拟以经济发达地区三甲医院的临床使用数据作为参考基线,这便可以覆盖全国绝大部分医院的使用情况。综合考虑下,选取全国综合排名靠前的上海市第六人民医院作为研究对象。
本研究采用的是从2019.6.21至2021.1.28自然日内的临床使用数据,按照每年311天工作日(每年约0.852年为工作日)计算,每台日均扫描病例62例,每台日均累计扫描时间586 min(9.76 h)。因为MR扫描过程中需要一定的辅助时间,因此可估算,MR每天9.76 h扫描时间实际需要11 h以上的操作时间。从上述数据看,MR实际临床使用存在较大的负荷,这对其可靠性提出了严峻的挑战。
本研究以平扫、常规弥散加权成像、常规增强扫描、水成像、磁敏感加权成像、动态增强扫描、血管造影等扫描方式为主要研究对象。从图2看,MR不同扫描方式的平均单次扫描时间在7 min~24 min之间,可见,MR不同扫描方式之间的负荷相差较大,因此,对MR扫描方式的分类是十分必要的。
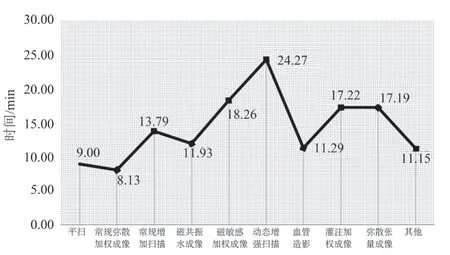
图2 MR平均单次扫描时间Fig.2 Average single MR scan time
为了将不同扫描方式和MR设备的工作负荷相关联,分别从扫描病例和扫描时间上对上述扫描方式进行统计分析。根据图3和图4,MR的扫描方式有明显聚集的特点,且平扫在扫描病例和扫描时间均在64%以上,占磁共振成像的主要部分。根据图3,失效与扫描病例数直接相关的部件的临床使用扫描方式被分为平扫和其他扫描,其扫描类型为扫描I型,且其比例近似为0.7:0.3。根据图4,失效与扫描时间直接相关的部件的临床使用的扫描方式被分为平扫和高强度扫描,其扫描类型为扫描II型,且其比例近似为0.65:0.35。依据各临床使用扫描方式的特点,本研究将动态增强海马扫描(扫描过程复杂)作为扫描I型中其他扫描的典型扫描,并将动态增强心脏扫描(扫描负荷强度高)作为扫描II型中高强度扫描的典型扫描,具体如表1所示。

表1 MR扫描类型基本描述Tab.1 Basic description of MR scan types
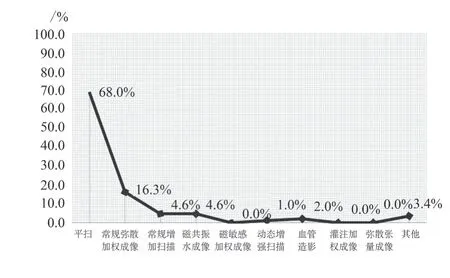
图3 MR扫描病例分布Fig.3 Distribution of MR scanning cases
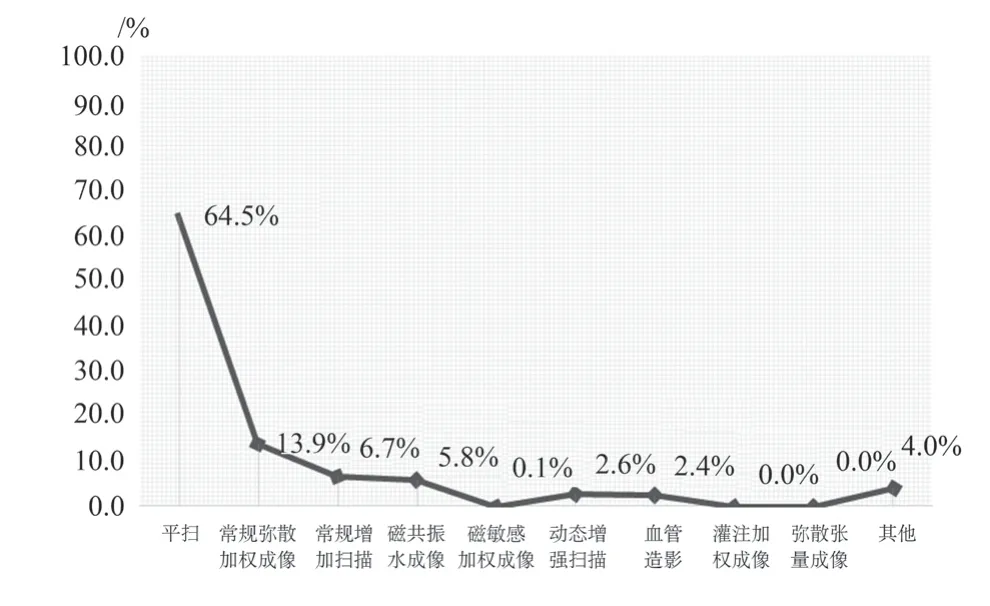
图4 MR扫描总时间分布Fig.4 MR scan time distribution
3 MR系统可靠性指标确定
MR系统可靠性指标与产品定位密切相关,且受制于市场行为因素,同时,其还是系统可靠性分配和部件可靠性指标实现的前提,因此,可靠性指标的设定极为重要。根据MR系统使用特点,其可靠性指标主要有MTBF(mean time between failure,平均故障时间间隔)和寿命两个指标。
MR系统可靠性指标确定通常有以下几种方法或途径:
(1)同类产品。适用于上市新产品或提升市场竞争力的产品,参考国内外同类或相似产品可减少资源不足或浪费的问题。如市场上广泛存在的1.5 T或3 T磁共振。
(2)特定目标值。适用于特定用户特定需求的可靠性要求。如某定点医院或定点科室的产品。
(3)预期目标值。适用于市场上独创或独一无二的产品。对于这类产品,需要分析当前技术水平、市场容忍度和开发成本等因素。如舰载型磁共振。
4 MR系统可靠性分配
MR系统可靠性分配是围绕可靠性指标进行的,是将系统可靠性指标合理分配到子系统、单元、零部件(或元器件)的全过程。通过可靠性分配,各子系统、单元或零部件被赋予确定的可靠性指标,并围绕系统可靠性指标开展对应的可靠性设计与验证。
MR系统是十分复杂的,涉及的子系统、单元和零部件众多,为了便于可靠性指标的实现,我们将MR系统分为系统和部件两个层级,以保证系统可靠性指标可操作性。根据MR系统的工作原理和系统功能可知,其可靠性系统属于典型的串联系统,因此,MR部件可靠性指标分配可按照图5可靠性框图开展。

图5 MR系统可靠性框架Fig.5 MR system reliability block diagram
结合当前MR系统技术水平、市场情况和系统复杂度等因素,MR系统可靠性分配方法可采用等分配法进行,其分配公式如下:

其中,Rs为系统可靠度指标,Ri为各部件可靠度指标,n为部件总数。
5 MR部件可靠性指标实现
MR部件可靠性指标的实现是MR系统可靠性指标实现过程中最为重要的环节,其不但是系统可靠性指标确定和系统可靠性分配的参考,还是系统可靠性预计和验证的重要基础。在系统开发阶段,MR部件可靠性指标实现往往通过可靠性试验来完成,而部件可靠性试验的基础则是MR系统临床使用工况数据。因此,MR部件可靠性指标的实现必须建立在MR临床使用工况数据之上。
MR部件遭受的主失效应力为动力学和电热学两大部分,因此,本研究将其分为动力学部件和电热学应力部件。对于主要失效应力是动力学和电热学同时存在的部件(如梯度线圈、体发射线圈和局部线圈),其可靠性设计、分析和验证可分别从动力学和电热学两方面开展,即同一个部件同属动力学部件和电热学部件。表2是根据主失效应力给出的MR主要部件扫描类型划分。
5.1 动力学部件
按照动力学产生的机制和影响,MR动力学部件可分为运动应力部件和振动应力部件。其中,运动应力部件属于扫描I型,振动应力部件属于扫描Ⅱ型。为了更深入开展MR部件的可靠性分析、设计和验证,运动应力部件以检查床(病床)为典型代表,振动应力部件以体发射线圈(VTC)为典型代表。
5.1.1 运动应力部件
病床是MR主要的运动应力部件,其主失效应力是运动过程中产生的周期性低频应力。从表2可知,病床属于扫描I型,且其失效与扫描病例直接相关。从MR临床使用的工作流可知,以平扫颅脑扫描为基准,病床通常完成1次竖直升降和1次水平运动。以其他扫描中的典型扫描为例,病床需完成1次竖直升降和3次左右的水平运动。以上述临床使用工况数据为基准,即可推算出来其预期寿命的载荷,具体如表3所示。

表2 MR主要部件扫描类型划分Tab.2 Classification of MR main components scanning types

表3 病床预期寿命载荷计算Tab.3 Load calculation of patient table life expectancy
为了便于后期开展有效的寿命设计和验证,本研究根据Miner疲劳损伤机理给出以下加速因子公式。
其中:N工作是工作循环次数;N2是条件假设下的循环系数,可以为疲劳强度或加速试验强度下的循环次数;δ2是条件假设下的强度,可以为疲劳强度或加速试验强度;δ工作是工作应力;k为强化系数,钢材一般取4.5,其他材料也可以根据S-N曲线获得;AF是加速因子(当δ2为加速试验强度时,推荐δ2不大于材料屈服强度的极限的0.8倍)。
值得注意的是,由于竖直机构和水平机构是同时存在的,因此,寿命加速试验必须同时完成对竖直机构和水平机构的加速试验。借助上述寿命加速的方法,病床的MTBF和寿命可以采用定时截尾或定数截尾的方法测量。
5.1.2 振动应力部件
VTC安装在磁体孔径最内圈,其主失效应力为振动应力和电应力,电应力部分可参考电热类部件,为此,本节以VTC为例开展其振动应力的分析。从表2可知,VTC振动应力部分属于扫描Ⅱ型,其遭受的振动应力与扫描时间和扫描强度相关。VTC的振动类型为受迫振动,因此,其输入激励便是其安装基座处的响应,表4是本研究推算出的其预期寿命载荷。
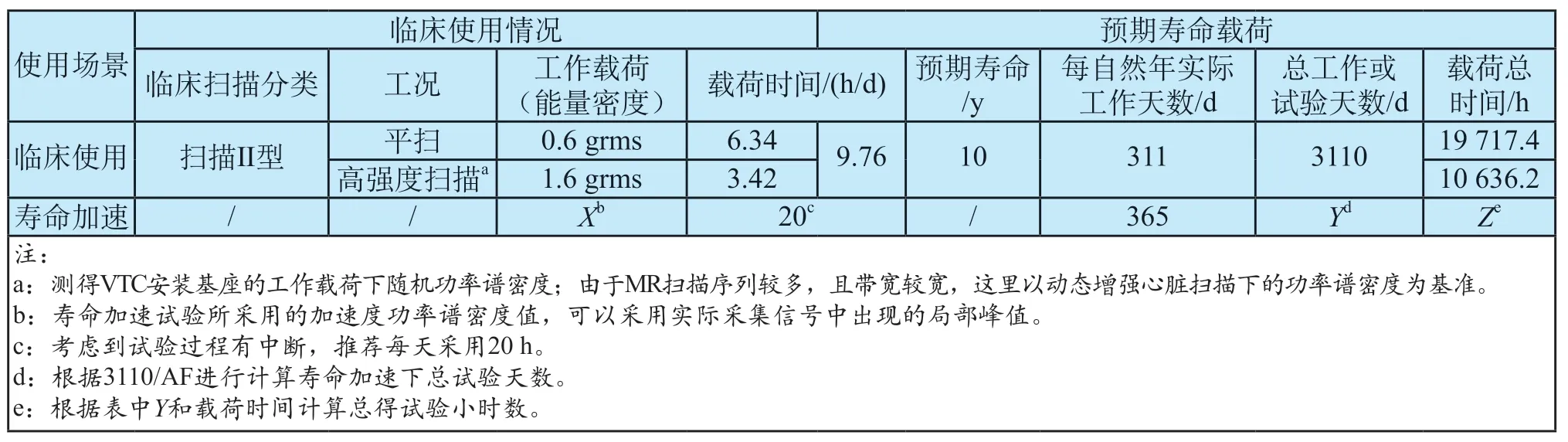
表4 VTC预期寿命载荷计算Tab.4 Load calculation of VTC life expectancy
由于临床使用的工况为两种工况,因此,分别计算临床使用高强度扫描和高温寿命加速相对平扫的加速因子才可计算总的加速因子。具体计算式如下:
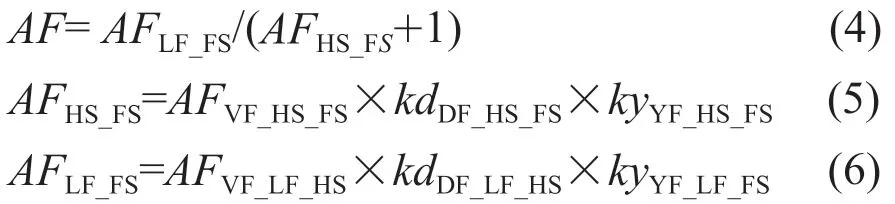
AFVF_HS_FS和AFVF_LF_FS跟振动能量谱相关,其符合GJB 150.16A-2009给出振动能量的加速因子公式。表5是寿命加速试验下的符号和释义。
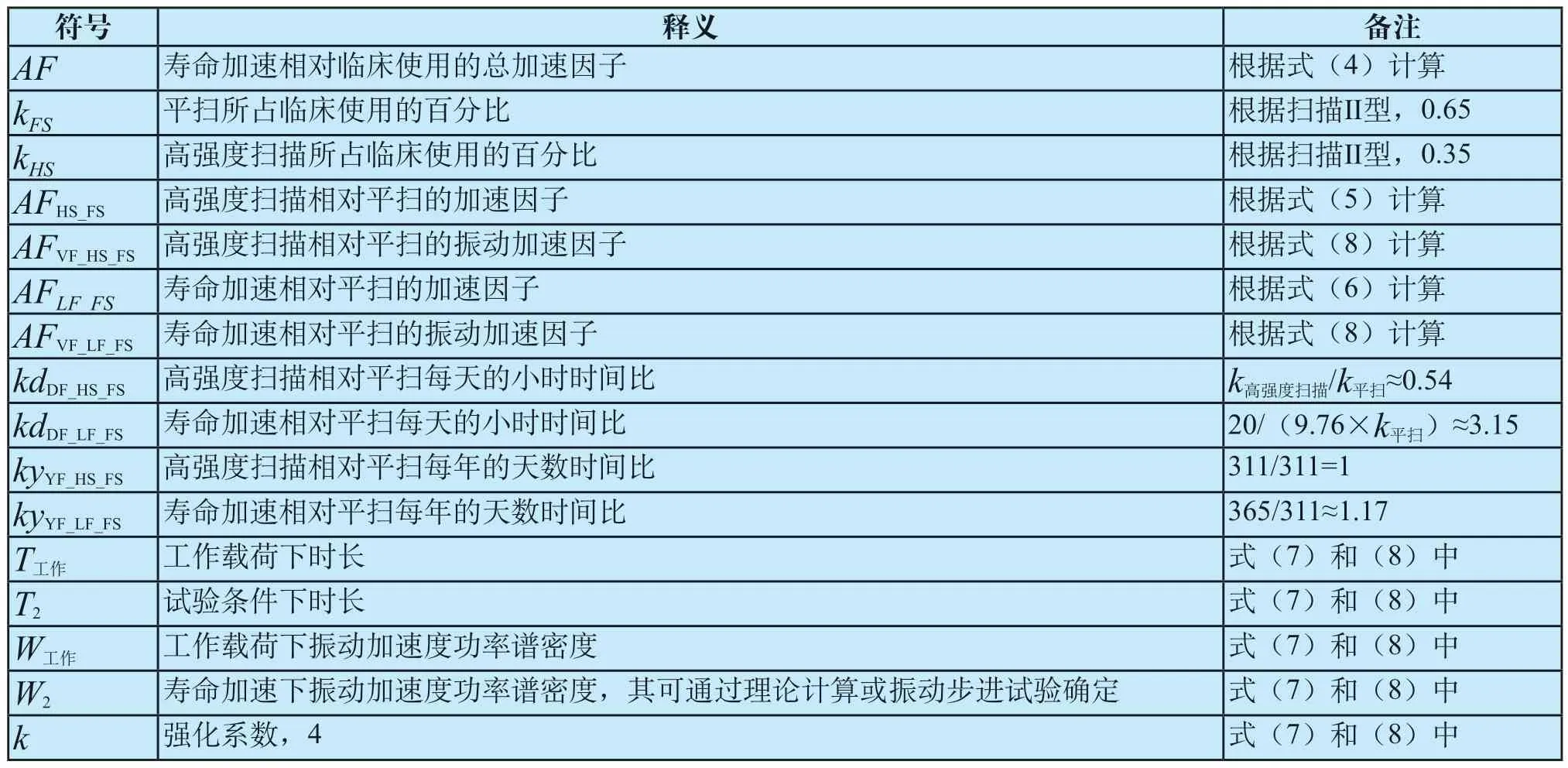
表5 VTC寿命加速试验符号及释义Tab.5 Symbols and interpretation of VTC accelerated life test
5.2 电热学部件
从表2可知,MR电热学部件组成较多,含有大功率的电力电子部件和小功率的电子部件。在MR系统中,梯度功率放大器(gradient power amplifier,GPA)和射频功率放大器(radio frequency power amplifier,RFPA)具有较大的工作功率,因此,其一般被认为大功率电力电子部件。谱仪系统、计算机、显示器、对讲机等部件的工作功率较小,因此,这类部件在MR系统中一般被认为小功率电子部件。由于电热学的部件大多类似,且工作载荷相似,故以联影某型号RFPA整机作为典型事例进行可靠性设计与验证。根据表2,RFPA属于扫描Ⅱ型,其预期寿命载荷,如表6所示。
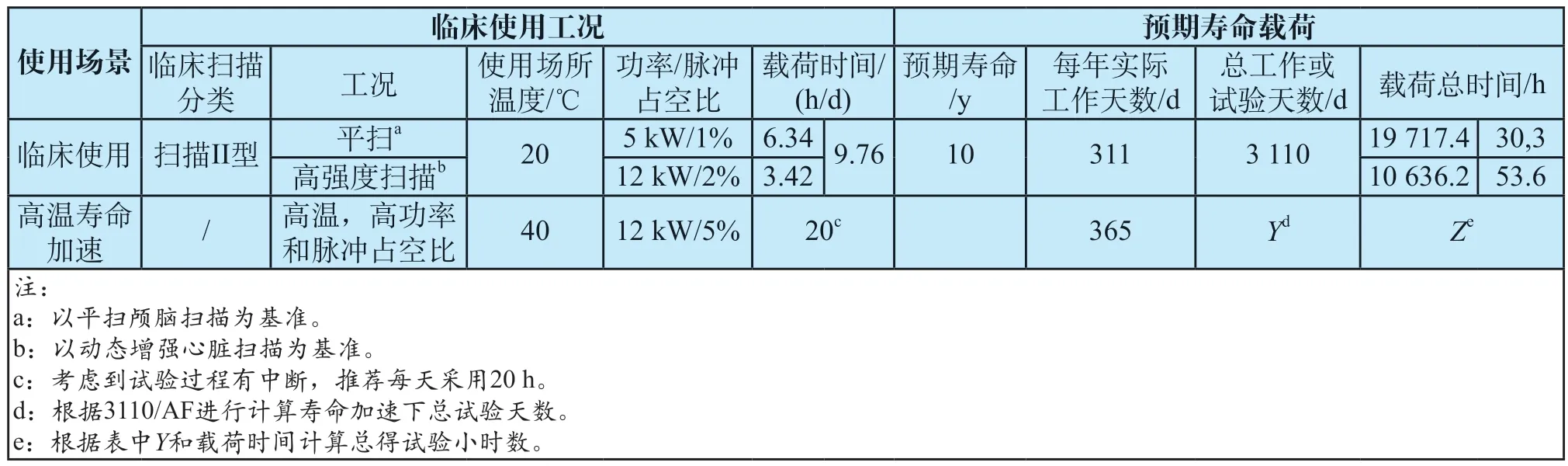
表6 RFPA预期寿命载荷Tab.6 Load calculation for life expectancy of RFPA
由于临床使用的工况为两种工况,因此,分别计算临床使用高强度扫描和高温寿命加速相对平扫的加速因子才可计算总的加速因子。具体计算公式如下:
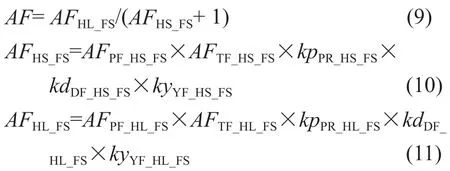
AFPF_HS_FS和AFPF_HL_FS都跟功率倍数相关,其符合逆幂律模型,具体如式(12)所示:VT为高温寿命加速的输入功率;VA为平扫或高强度的输入功率;C为常数,这里取5。

AFTF_HS_FS和AFTF_HL_FS都跟温度相关,其符合阿伦纽斯模型,具体如下公式。

AF为加速因子;k为玻尔兹曼(boltzman)常数(8.167×10-5eV/℃);E为激活能,单位为eV,此处取0.7;TA为平扫或高强度的工作温度;TT为高温加速下的工作温度。
根据上述式(9)~(13)和表7计算可得,RFPA高温加速寿命相对临床使用的加速因子约为99。在高温寿命加速试验条件下,RFPA临床使用3年的模拟只需加速试验11 d即可。可见,寿命加速对RFPA的可靠性设计与验证提供了极高的设计和验证效率。

表7 RFPA寿命加速试验符号及释义Tab.7 Symbols and interpretation of RFPA accelerated life test/
5.3 小结
MR部件寿命加速的方法可极大提高部件可靠性指标实现的效率。有了部件寿命加速方法的保证,结合部件截尾试验方法,MR部件的MTBF和寿命指标便可在短时间内验证或获得,这为系统可靠性预计提供了基础,也为系统可靠性指标的实现提供了最为关键的保证。
6 MR系统可靠性预计
MR系统可靠性预计是为了估计系统给定的工作条件下的可靠性而进行的工作,根据组成系统的部件可靠性来推算系统是否满足规定的可靠性要求。组成MR系统的部件大多十分复杂,涉及多个学科,且部件的功能系统是复杂的串并联模型,因此,MR部件的失效分布可认为满足指数分布,故障率与MTBF成倒数。根据图5中描述的MR系统串联模型,其可靠性预计式为:

Rs(t)为系统可靠度;Ri(t)为第i个单元可靠度;n为部件总数。
MR系统可靠度为各部件可靠度的乘积,因此系统可靠度随着串联单元的增加而减少。由于MR部件失效分布为指数分布。即:

则MR系统的可靠度为:

MR系统的失效率为:

λi为MR各部件失效率,λs为MR系统失效率。
MR系统的MTBF可用下式计算:

7 MR系统可靠性验证
结合上述章节,MR系统可靠性预计的MTBF指标可被得出,但其却不是MR系统真实的MTBF。同时,MR系统的可靠性指标有MTBF和寿命两个指标,因此,MR系统可靠性验证需要针对MTBF和寿命指标分别验证。
MR系统的MTBF指标试验验证极其困难,不仅存在时间和成本的巨大挑战,而且存在一定的误差。为此,基于临床使用维保数据的统计方法则是可行的,其不仅真实可靠,而且对于量小复杂的MR系统具有现实意义。MR系统的MTBF计算式如下:

其中:NS为样本数量,TF为总累计无故障时间,NF总累计故障次数,TFi为第i个样本累计无故障时间,NFi为第i个样本累计故障次数。
对于MR系统的寿命,其往往是由MR系统最为核心或重要的部件决定的,因此,对MR系统寿命起决定作用的部件可被称之为寿命特征部件。磁体对MR系统寿命起决定作用,因此,磁体的寿命便是MR系统的寿命。磁体通常也是可以被维保的,因此,磁体寿命的终结是以其核心功能的丧失或者维修成本大于新品购买成本时为标准的。
对于磁体寿命的验证,由于MR系统的设计寿命一般都在10年以上,因此,采用临床使用维保统计数据的方法往往不可行。因此,磁体寿命的验证采用MR部件可靠性指标实现中的寿命加速验证则是十分高效的。
8 结论
虽然MR系统较为复杂,但其可靠性指标的实现是可以从临床使用工况数据、系统可靠性指标确定、系统可靠性分配、部件可靠性指标实现,系统可靠性预计和系统可靠性验证是按照一整套流程进行的。将MR系统分为系统和部件两个层级的方法简化了MR系统,更加有利于系统可靠性指标到系统可靠性的分配。
部件可靠性指标实现是系统可靠性指标实现最关键的部分,其不仅是可靠性指标目标值确定和系统可靠性分配的重要参考,同时是系统可靠性预计和系统可靠性验证的基础。通过扫描类型划分和MR部件应力分类,临床使用工况可被转化为MR部件提供量化基准,进而为MR部件可靠性指标实现提供基础。从RFPA的事例看,寿命加速可极大提高部件可靠性指标实现效率。
结合MR系统框图和部件可靠性指标,MR系统可靠性指标便可顺利完成预计。考虑到MR系统现实环境,其MTBF指标的验证采用基于临床使用数据的统计方法是有效的,而其寿命验证采用MR寿命特征部件的寿命加速验证方法是可行的。
