车辆电子电气架构演进趋势研究
2021-12-05张政
张政
(上汽通用汽车有限公司, 上海 201206)
主题词:电子电气架构(EEA) 域控制架构 中央计算架构 演进
1 引言
随着汽车电动化、智能化、网联化和共享化(新四化)不断发展,汽车功能变得越来越丰富和人性化,从而使得电子元件数量也越来越多,各电子元件之间的交互逻辑也越来越复杂[1]。而传统的汽车分布式电子电气架构本身就存在着通讯带宽低、计算能力不足和软件升级不便的问题[2],如果再使用通过不断的增加控制模块和设计复杂的模块交互逻辑来实现新增车辆功能的传统电子电气架构,会使得控制模块之间的总线通信交互越来越拥堵,以致于无法实现汽车的各种智能功能,因此,汽车电子电气架构必须能够支撑汽车“新四化”的发展。新的电子电气架构必须具备高通讯带宽、高计算力和高网联安全性,并支持远程软件升级(OTA),随着“新四化”的不断发展,汽车电子电气架构也会不断的进行革新,软件集中化的域控制器架构和中央计算架构将会成为未来汽车电子电气架构的主流发展方向。
电子电气架构是指在功能需求、法规和设计要求的特定约束下,通过汽车上的控制器、执行器、传感器的电子元件来实现车辆的能量管理、网络通讯、诊断方面规划的电子电气解决方案[3-4]。先进的电子电气架构可以有效地减轻汽车整体质量,降低汽车研发成本,缩短车辆研发周期,并能够确保车辆的最佳性能。整车电子电气架构涵盖了10 个基础要素[5-7],分别是线束路由及分配、零部件布置策略、保险丝和接地分配、能量管理、电源模式管理、网路通讯、诊断、功能分配/特征集成、整车平台化电子电器接口和控制器标准化的基础软件。通过对这些基本要素的逐步设计开发,从而实现整车的功能需求。
2 电子电气架构演进趋势
电子电气架构的复杂主要体现在不断增加的控制器数量、网路总线类型和线束系统复杂性,为了降低电子电气架构的复杂性,电子电气架构也需要不断的升级和进化。目前行业内普遍比较认同的是博世提出的汽车电子电气架构演进趋势[8](图1),该演进趋势包括3 个大阶段和6 个小阶段,3 个大阶段依次是分布式电子电气架构,域集中电子电气架构,车辆集中电子电气架构。每个大阶段又包含2个小阶段,从而形成了6个小阶段,依次是模块化、集成化、集中化、域融合、车载电脑和车-云计算。随着架构的不断升级,对软件的代码数量也在不断增加,最终将实现车辆功能在云端计算,下面将对6个小阶段的特点和演化趋势进行详细阐述。
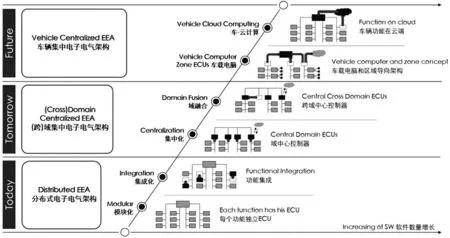
图1 电子电器架构演进趋势[8]
2.1 第1阶段:模块化
该阶段功能划分明确,一个功能一个控制模块,模块与模块之间界限明确,一切“越界”行为容易控制。模块的设计通常基于特定的功能,如尾门控制模块(PLG)等,模块与模块之间通过CAN 总线进行通信。由于模块间的独立性较强,模块开发者不用太过于考虑其它模块的干扰问题。但其局限性在于功能控制模块的独立开发模式,虽然能够确保模块自身的功能要求,但是由于传输信号带宽的局限性,导致了资源无法共享,大量运算资源浪费。
2.2 第2阶段:集成化
集成化阶段仅仅是模块化阶段的一个小规模升级,在架构上减少了功能单一的模块,将车辆功能小范围向其它控制器中进行融合。如空调功能以往是由电子空调模块控制(ECC),无钥匙进入和无钥匙起动功能通常是由PEPS模块控制,经过融合之后,可以将空调调节功能、无钥匙进入和无钥匙起动功能全部都集成到车身控制模块(BCM)中,而删除了ECC 模块和PEPS 模块。这样带来最大的收益是降低了成本,但却依然无法弥补跨模块之间通讯速率低的不足,模块与模块之间的壁垒仍然没有打破。
2.3 第3阶段:集中化
集中化架构采用了域中心控制器(Domain ECUs),“域”概念的核心思想是灵活,在系统与软件层面进行了集成,脱离了模块软件与硬件捆绑的限制[9-10]。在架构中引入车载以太网高速通讯,各域控制器之间采用以太网进行信息共享,打破了带宽的局限性。该架构中的核心复杂算法可以集成在域控制器中,而小型的控制器可以不再关注复杂算法,而是更多地关注自身控制器的硬件和驱动,如防夹算法、备份驱动、电压补偿等算法都可以集成在域控制器中。这样,不但大幅度减少了冗余软件的开发量,而且也大大精简和优化了其它控制器。域控制器是按照整车系统功能进行域划分的,一般可分为动力总成域、底盘系统域、车身电子域、智能座舱域和智能驾驶域这5个功能域。
2.4 第4阶段:域融合化
域融合就是采用跨域中心控制器将2 个及以上的域控制器进行融合,核心复杂算法都集成在跨域中心控制器里,原来域下面的小型控制器都融合到跨域中心控制器下面。如果将智能座舱域和智能驾驶域进行融合,则可以形成一个包含自动驾驶及娱乐信息功能的跨域中心控制模块。这样的好处是将车辆域控制器进一步融合,减少控制器数量从而降低成本。
2.5 第5阶段:车载电脑
上述Domain ECU 仍然是以功能为导向的,即将车辆的功能向域控制器里集中,但由于车辆上各执行器的位置不变,势必会导致线束长度的增加,从而增加线束成本。以车身后方的制动灯功能为例,该功能是由车身前方的车身电子域模块控制,线束需要跨过80%的车身。为了节约线束成本,而又不丢失软件集中的“域”核心概念,从而引入了区域控制器(Zone ECUs),取消了传统的功能域控制器,取而代之的是车辆物理空间上的区域控制器,这种电子电气架构主要由中央车载电脑和多个区域控制器组成[11-12]。这种划分方式是按照物理布置方案来划分的,采用就近原则,由繁至简,通过各区域控制器之间的交互来实现整车功能。Zone ECUs 完全从软件的角度去实现车辆的功能,很好的诠释了“软件定义汽车”。
2.6 第6阶段:车-云计算
车-云计算架构是最高阶段的电子电气架构,指的是在中央车载电脑和在Zone ECUs的基础上引入云计算的概念,将区域控制器中的部分复杂算法集成在云端,由云端算法来控制车辆的功能,从而实现车-云计算。第6阶段也是电子电气架构演进的最高阶段,未来随着汽车智能化技术的不断发展,电子电气架构将逐步朝着最高阶段进发。
3 未来主流电子电气架构拓扑形式
3.1 域控制架构拓扑形式
域控制架构的拓扑形式如图2,该架构包含一个中央网关(Gateway)和多个功能域控制器(Domain ECU),各域控制器之间的信息交互是通过中央网关进行路由的,并通过以太网(Ethernet)来传输数据以突破带宽的限制[13-14]。根据各功能域控制器所控制的功能范围不同,在功能域控制器的范围内再连接一些常规控制器,以实现不同的功能需求,内部控制器之间的总线通讯方式采用比较灵活,可根据实际通信需求和成本设置成Ethernet、CAN FD、CAN 和LIN 总线的通讯方式。外部诊断设备Tester 可以通过DoIP 以太网诊断经由网关路由来诊断车辆内的任何一个ECU模块。常见的功能域控制器有动力域控制器、底盘域控制器、车身域控制器、娱乐域控制器和自动驾驶域控制器,其中各域控制器之间可以进行进一步融合,如底盘域和车身域进行融合。
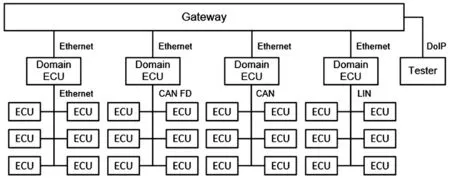
图2 域控制架构拓扑
联合汽车电子公司设计开发的扩展型域控制器架构就是一种功能域控制架构(图3),根据未来智能网联汽车的功能需求,顶层为云端服务平台,中间层为计算与控制层,底层为标准化执行器与传感器层。该架构分为信息娱乐域、车身域、动力总成域、底盘域、辅助/自动驾驶域[9]。这种架构可以通过底层进行数据收集,在中间层进行数据处理与分析,最终反馈到云端,由云端服务器根据需要处理的信息,为不同车辆提供灵活性的调度处理。

图3 拓展型控制器架构[9]
3.2 中央计算架构拓扑形式
中央计算架构拓扑形式如图4,该架构由中央计算模块和区域控制器组成,并且区域控制器按照车辆物理空间的布置方式进行分布,各控制器之间采用Ethernet)通讯[15-16]。中央计算模块集成了核心的智能驾驶和智能座舱相关的复杂算法,为避免中央计算模块故障带来的车辆安全问题,需设计一个备用中央计算模块。各区域控制器则根据就近原则分布在车辆周围,区域控制器会连接一些简单的ECU 或执行器,并接收传感器数据,通过复杂的软件算法来实现整车所有的功能需求。

图4 中央计算架构拓扑
特斯拉Model 3的电子电气架构就是一种中央计算架构拓扑形式,由中央计算模块、前车身控制器、右车身控制器、左车身控制器所构成,如图5所示[13]。按照车辆的实际分布位置对车辆控制进行了区域划分,这样布置简化了线束,提高了系统效率。中央计算模块主要作为整车的决策中心,负责处理所有辅助驾驶相关的传感器,并对主要核心控制器进行数据处理和决策仲裁。
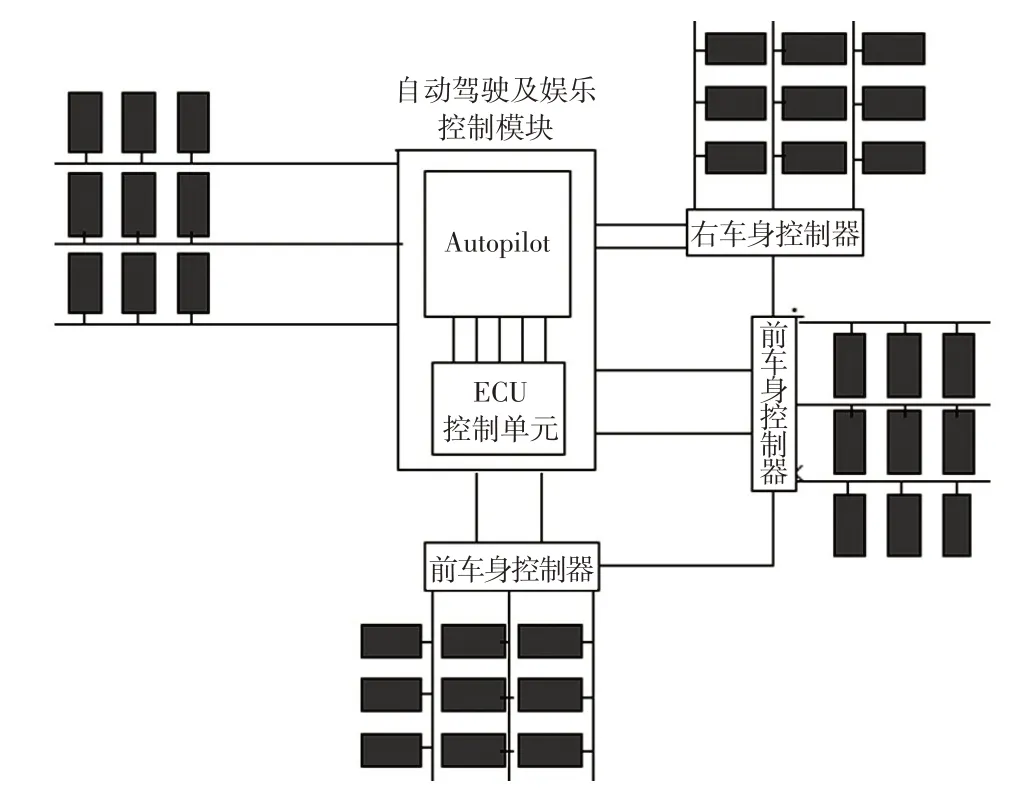
图5 特斯拉Model 3的电子电气架构[13]
3.3 域控制架构和中央计算架构对比
域控制架构和中央计算架构各有优势(表1),域控制架构的功能划分明确,控制逻辑清晰,分析排查车辆问题时便于定位问题,同时对软件算法要求较低,实现起来较容易。中央计算架构对软件算法要求较高,算法相对集中,需求的控制器数量和线束布置较少,车辆各控制器之间的信息交互相对较简单,但因为其对软件开发的能力要求较高,实现起来较复杂。未来这2 种电子电气架构将会成为主流的汽车架构,且会并存很长一段时间,但随着汽车智能网联技术的不断发展,最终都将会迈向中央计算架构。

表1 域控制架构和中央计算架构对比
4 结束语
汽车“新四化”技术的不断发展促使了汽车电子电气架构不断进行革新。传统OEM 公司基于自身现状,无法大刀阔斧地切换自己的电子电气架构,但技术发展的趋势又无法阻挡,会利用现有资源按照电子电气架构演进趋势的6 个阶段逐步升级完善公司的电子电气架构。而有互联网背景的新兴OEM 公司为了实现越迁式发展,则会利用自身的软件开发优势,直接从较先进的第3 阶段或第5 阶段架构开始开发,以实现汽车上先进的智能驾驶和智能座舱技术。伴随着智能驾驶时代的到来,所有OEM 公司最终将朝着车辆功能在云端计算的电子电气架构方向发展。
