行车下客激光防撞系统技术研究*
2021-12-04张弛刘清成王洋杨国浩党敬宣
张弛,刘清成,王洋,杨国浩,党敬宣
(上海工程技术大学,上海 201620)
自1899 年美国纽约发生世界上第一起机动车意外致人死亡事故以来,全球已有2 000 多万人死于汽车事故,受伤者达5 亿多人[1]。汽车防撞系统是一种可向司机预先发出视听预警信号的探测装置。它安装在汽车上,能探测企图接近车身的行人、车辆或周围障碍物,并能向驾驶员及乘员提前发出即将发生撞车危险的信号,促使驾驶员采取应急措施来应付特殊险情以避免损失[2],因此研究一个乘客下车防撞预警系统十分有意义。
1 激光雷达预警模型
为了兼顾距离以及角度,激光雷达选用机械扫描装置,放置在车辆顶部,可以在360°二维平面扫描,扫描周期T=2π/ω[3],旋转频率ω=3 600°/s,角度分辨率为1°,测量频率为3 600 Hz,测量精度小于距离的1%,探测半径不小于100 m。该装置按照正前方为0°的坐标系记录附近物体的极坐标,可以对附近物体进行测距、测角以及测速。
雷达本身可以根据发送到接收同一信号的时间并且根据公式R=ct/2 算出两车的真实距离,其中c为光速,t为雷达从发射到接收同一信号所用时间[4]。
考虑到后车和小车位置可能不在一条直线上,由数学关系可得垂直距离为l=R×cosθ,θ为后方行车之于小车正前方的极坐标角度。雷达在第一个扫描周期探测到进入测距范围的物体后记录它的极坐标(R1,θ1),在第二个周期扫描到物体时记录第二次的极坐标(R2,θ2),以此类推,在进行下一周期的扫描时更新计算数据,并适时计算同一目标轨迹的瞬时速度与距离,通过数据与系统设定值的对比来判断是否启动车门信号。激光雷达的探测预警示意如图1 所示。
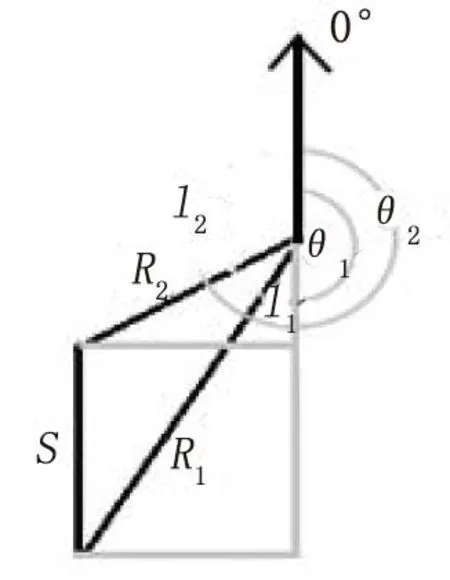
图1 激光扫描雷达探测预警示意图
探测同一目标经历的时间t为:

目标在行车道路方向运行的路程s为:

前后车的水平距离x为:

后方车辆在行车道的速度v为:

式(4)中:v0为小车的瞬时沿道路前进方向的速度,若小车静止则v0为0,联立得:

式(5)中:θ1为第一次测距的极坐标角度;θ2为第二次测同一物体距离的极坐标角度。
2 激光雷达仿真分析
根据小汽车型号的不同,车宽和车门长度不同,小轿车车宽一般为1.6 m,SUV 车宽一般为1.8 m,四门车的车门长展1.2 m,假设雷达居于汽车车顶中线上,半个车宽加上最大打开角度的车门展向总长不小于2 m。仿真实验选取留安全裕量后设2.5 m 的水平安全距离。
假设载有此雷达的小车停在路边,左侧水平距离2.5 m处出现一辆摩托车,当被雷达扫描第一次探测到的θ1为181.5°,当预留10 s 安全时间后,除去10 s 后的剩余时间余量随极角变化曲线如图2 所示,车辆的沿着道路方向的速度随极角变化曲线如图3 所示。
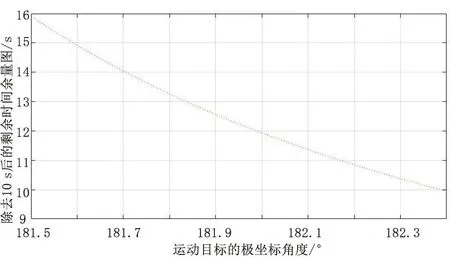
图2 除去10 s 后的剩余时间余量随极角变化曲线图
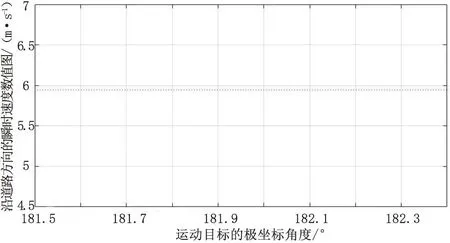
图3 车辆的沿着道路方向的速度随极角变化曲线图
由图3 可知,在扫描频率为3 600 rad/s 的情况下,后方驶来的摩托车在一个多扫描周期之内行进到距离本车10 s预留时间,需要约束机动车的速度不大于5.94 m/s。
为了避免系统在行车过程中或对不靠近车辆的行车造成误动,困扰乘客。系统只在汽车挂停车档时被激活,并且可以设置速度预警,只有当探测物体的速度超过设定值时系统才会动作。
3 结论
本文设计的雷达系统,当探测系统作用距离大于100 m时,可以对低于5.94 m/s 的机动车进行安全监控,通过测量的数据与设定值的对比判断是否自动锁车门,防止乘客开门时遭到后车撞击发生意外,为国内外停车下客交通安全技术研究提供一定的参考。
