“自动控制原理”案例式教学改革实践*
2021-12-04张贞艳林卿刘美侠
张贞艳,林卿,刘美侠
(宿迁学院机电工程学院,江苏宿迁 223800)
“自动控制原理”是宿迁学院机电工程学院自动化专业必修的专业基础课。随着科技的飞速发展,自动化技术愈发重要。作为自动化的核心课程,“自动控制原理”作用巨大。如何让学生利用有限的学时掌握扎实的基础理论,并能灵活应用于工程实践中,解决工程难题,是课题组的授课目标。学校控制理论课题组积极响应教育部《关于开展新工科研究与实践的通知》精神,不断总结反思教学团队在授课过程中普遍存在的问题,积极探索高等工程教育背景下“自动控制原理”的教学改革新思路,有效变革传统授课模式和培养方法,形成了以“案例式”教学为主要特色的授课模式。
1 课程教学中存在的主要问题
“自动控制原理”面临如下主要难题:①课程层面。“自动控制原理”是对控制系统进行数学抽象,在获得系统的传递函数基础上,进行数学分析来研究实际系统特性的。内容繁多抽象,如不合理穿插代表性的工程案例,将难以体现课程的实践提升作用。②学生层面。在智能手机普及的网络时代,学生整体自我约束力不足,学习兴趣低,课堂专注力差。穿插工程案例,有助于吸引学生的专注力,活跃课堂气氛。③教师层面。照本宣科缺少案例的教学,其理论和实践是脱节的,再多的引导启发也体现不出课程的工程特色。对学校学生调研统计发现,采用传统的授课模式,即使在学完“自动控制原理”后,很多学生仍然茫然困惑,学而不知何用。
2 课程教学的改革措施
为解决以上难题,课题组把“案例式”教学引入“自动控制原理”课程中。具体措施如下。
精选“工程案例”,恰当穿插到课程体系中。例如,数学建模中引入大功率高性能摩托车减震器系统、水箱液位控制系统;时域分析法中引入电动轮椅的速度控制系统、喷气式战斗机的自动驾驶仪横滚控制系统;根轨迹分析法中引入外科手术用激光操作控制系统;频率特性法中引入单闭环有(无)静差调速系统、医学麻醉控制系统;系统校正中引入机器人控制系统、转速电流双闭环调速系统等。在理论教学中融入工程实践,将工程性放在课程首位。
着力打造“自动控制原理”精品课程网络教学平台,形成课堂教学的有效扩充。将选定的工程教学案例,制作成电子课件、微视频,将前沿的最优控制、自适应控制和鲁棒控制等工程应用的视频资源上传至精品课程网站。学生可根据课堂掌握情况,借助这一平台观看视频,开阔视野,巩固提升。
充分借助MATLAB 软件仿真,课程中所有的教学案例都利用MATLAB 软件进行了模拟仿真,这不但能加强学生对软件的利用,还能弥补实验设备上的不足,增加控制系统分析和设计上的说服力。
3 “案例式”教学实施举例
恰当的“工程案例”既能加强学生对理论知识的深入理解,又能使其对实际工程产生兴趣,提高对课程的深入认知。下面以应用于外科手术的激光操作控制系统为例,阐述教学案例实施过程。
以微视频的形式引出手术激光操作控制系统的应用背景。
介绍激光操作控制系统基本构成,定性分析各部分,提炼出系统控制框图,如图1 所示。

图1 激光操作控制系统
提出手术对激光操作控制系统的具体要求:稳定性好、稳态精度高、动态品质优。
图1 中系统中电机励磁时间常数T1=0.1 s,机电时间常数T2=0.2 s;要求学生设计放大器增益Ka,使该控制系统在单位斜坡输入r(t)=At(A=1 mm/s)时的稳态误差小于0.1 mm。
从稳、准、快三方面展开系统分析,求取系统开环传递函数和闭环传递函数。

综上Ka取10,可同时满足稳定性和稳态误差的要求。再次考虑系统动态品质,利用根轨迹分析法,先绘制Ka从0增长到∞时的根轨迹,如图2 所示。

图2 激光操作控制系统根轨迹
该系统有3 条根轨迹,对应图2 中①②③三条曲线,起始于开环极点,终止于无穷远处。

单位阶跃指令下,原系统的动态性能指标近似为:

仿真验证。借助MATLAB 仿真,得原三阶系统、近似二阶系统的单位阶跃、单位斜坡响应分别如图3~图6 所示。
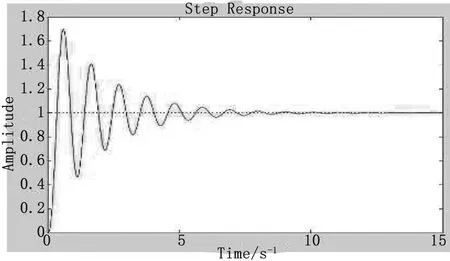
图3 原三阶系统单位阶跃响应
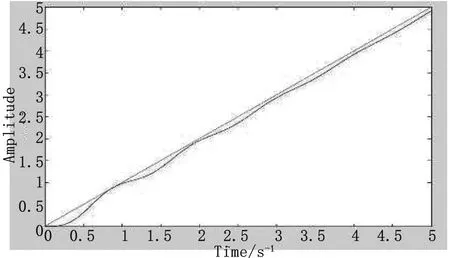
图4 原三阶系统单位斜坡响应
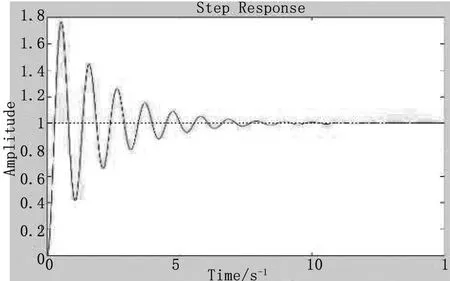
图5 近似二阶系统的单位阶跃响应

图6 近似二阶系统的单位斜坡响应
由图3、图5 可知,在阶跃输入下,激光操作控制系统虽最终能稳定,但其响应高度震荡,动态品质很差。这说明在外科手术中,不能采用阶跃信号作为指令信号。图4、图6 验证了外科手术选用低速斜坡信号作为指令信号,动态品质好。对比原系统和近似系统仿真结果,不难发现二者具有基本相同的输出响应。这进一步帮助学生加深了主导极点的概念,巩固了根据近似低阶系统估算高阶系统性能指标的方法。
4 结论
课题组分析了“自动控制原理”课程面临的主要问题,给出了“案例式”教学改革措施,举例论述了“案例式”教学设计。经过线上线下反复教学实践证明,“案例式”教学有效提升了课堂效果,提升了学生的专业兴趣和工程实践能力。